汽车断开式转向梯形机构的优化设计
- 格式:doc
- 大小:807.84 KB
- 文档页数:4
燕山大学本科毕业设计(论文)课题名称:断开式后置梯形转向器设计学院(系):燕山大学车辆与能源学院年级专业:06级车辆工程学生姓名:林剑超指导教师:夏怀成完成日期:2010年3月23日燕山大学毕业设计任务书摘要根据FSAE赛车的使用特点以及转向灵敏轻便的设计要求,本文将后置梯形的转向器作为设计重点。
制造出符合赛车要求的转向器。
首先根据赛道情况以及赛车本身的要求确定使用何种转向器。
以及根据赛车比赛时的赛道的弯道半径以及驾驶员的空间来确定传动比。
根据初确定的传动比来进行转向器的设计。
设计过程中发现由于本赛车的传动比是预确定的,由此决定了设计的过程与传统的转向器设计过程产生了一定的偏差。
本次设计首先通过预先确定的传动比,来设计计算主动小齿轮的技术参数。
再通过其参数来确定齿条的技术尺寸参数。
用CATIA软件绘制转向器各零部件三维结构图和总体装配图,以及二维零件图和总体装配图。
进行系统运动干涉检验,完成转向系性能参数计算和转向杆系零部件强度校核。
关键词:转向系统;转向器;FSAEAbstractAccording to the characteristics and the use of FSAE racing car .And the steering sensitive portable design request.This will be the rear ladder of the steering as the key point.Meet the requirements to produce the car steering.First of all, according to track conditions and the car itself to determine what steering to use.And when the track under racing radius corners and the driver of the space to determine the transmission ratio.According to early to determine the transmission ratio steering gear design.Found during the design of the car because the transmission ratio is pre-determined, which determines the design process and the conventional steering the design process had a definite bias.This design first through a predetermined transmission ratio, to take the initiative to design and calculation of the technical parameters of the pinion.Another parameter to determine the rack, through its technical dimensions.Steering with the CATIA software rendering three-dimensional structure diagram of various components and overall assembly diagram, and the overall two-dimensional part drawings and assembly drawings.Systematic movement interference testing, complete the steering system performance parameters calculated and strength check of steering rod parts.Keywords:Steering system; Steering; FSAE目录摘要:Abstract:第一章:绪论1.1课题背景1.2课题主要研究内容1.3课题研究意义第二章:FSAE赛车转向器的设计计算2.1 设计方案的选择2.2 齿轮齿条转向器设计计算2.3 本章小结第三章:各部件的校核与计算应用3.1 转向系载荷的计算3.2 齿轮齿面接触疲劳强度及齿根弯曲疲劳强度校核3.3 齿轮轴强度校核3.4 轴承的校核3.5 本章小结第四章:应用CATIA进行三维图以及二维图的绘制4.1 CATIA相关内容简介4.2 设计所用到模块简介4.3 CATIA二维图国标的设置方法4.4 绘制的三维零件图及装配图4.5 本章小结结论参考文献致谢附录1附录2 附录3 附录4第1章绪论1.1课题背景Formula SAE,是由各国SAE,即汽车工程师协会举办的面向在读或毕业7个月以内的本科生或研究生举办的一项学生方程式赛车比赛,要求在一年的时间内制造出一辆在加速、刹车、操控性方面有优异的表现并且足够稳定耐久,能够成功完成规则中列举的所有项目业余休闲赛车。
V ol 121 N o 18公 路 交 通 科 技2004年8月JOURNA L OF HIGHWAY AND TRANSPORT ATION RESEARCH AND DEVE LOPMENT文章编号:1002Ο0268(2004)08Ο0124Ο05收稿日期:2003Ο07Ο03作者简介:李玉民(1969-),男,河南南阳人,东南大学博士研究生,主要研究方向为载运工具运用工程1转向梯形驱动机构的运动分析及优化设计李玉民1,李旭宏1,过学迅2(11东南大学交通学院,江苏 南京 210096;21武汉理工大学,湖北 武汉 430070)摘要:转向梯形驱动机构的空间布置对汽车的操纵稳定性影响很大。
本文以常见的非独立悬架结构为例,建立空间几何模型进行运动分析,提出同时满足“与前悬架运动协调”和“左右转向力均匀”两方面要求的转向梯形驱动机构优化设计方法。
实践应用表明该方法可行。
关键词:汽车转向;空间连杆机构;运动分析;优化设计中图分类号:U46312 文献标识码:AK inematics Analysis and Optimal De sign of Driving Mechanismsof Ackerman Steering LinkageLI Yu Οmin 1,LI Xu Οhong 1,G UO Xue Οxun2(11T ransportation C ollege ,S outheast University ,Jiangsu Nanjing 210096,China ;21Wuhan University of T echnology ,Hubei Wuhan 430070,China )Abstract :The spatial position of driving mechanisms of Ackerman steering linkage quite in fluences the stability of vehicle maneuvering characteristics 1T aking non Οindependent suspension as an example ,this paper establishes spatial geometric analysis m odel ,then puts forward an optimal design method which meets the coordinated m otion of steering driving linkage and front suspension ,at the same time meets the uniformity of left Οand Οright steering force 1Application shows that the method is feasible 1K ey words :Autom otive steering ;S patial linkage mechanisms ;K inematics analysis ;Optimal design 如图1示,汽车转向传动机构包括转向梯形和转向梯形驱动机构,其中转向梯形驱动机构是指由转向摇臂OA 、直拉杆AB 和转向节臂BC 等组成的驱动转向梯形完成转向任务的连杆机构。
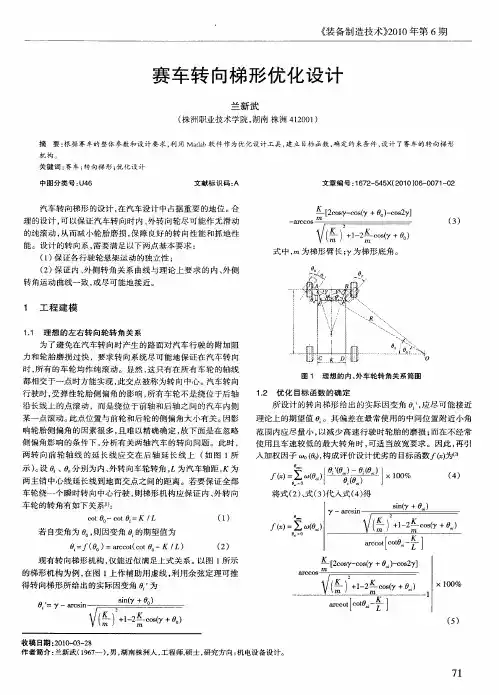
10.16638/ki.1671-7988.2020.05.027分段式转向梯形断开点的优化设计王成玲,刘富强,张勇,李玉(中国北方车辆研究所,北京100072)摘要:文章建立了某轮式车辆的前独立悬架和转向系统的参数化模型,阐述了分段式梯形断开点设计需要遵循的两点原则,分析了断开点三个方向坐标对阿克曼转向特性以及车轮跳动过程中前束角变化的影响,以实际外轮转角与理论外轮转角差值最小以及前束角变化最小为优化目标,对断开点位置进行了优化分析。
研究结果表明,断开点坐标的优化可以改善车辆转向特性,同时提高转向系统与悬架系统的运动协调性,为轮式车辆转向梯形的设计提出了较为合理的优化方案。
关键词:转向梯形;断开点;优化设计中图分类号:U461.6 文献标识码:A 文章编号:1671-7988(2020)05-93-03Optimization Design of Splitting Point of Steering TrapeziumWang Chengling, Liu Fuqiang, Zhang Yong, Li Yu( China North Vehicle Research Institute, Beijing 100072 )Abstract:The parametric analysis model of the suspension and steering system of certain wheeled vehicle has been established. Two design principle for Splitting Point of steering trapezium has been expounded. The effect of splitting point on Ackerman steering characteristics and toe angle has been studied. Taking minimum deviation between actual wheel turning angle from the angle and theoretical turning angle, the minimum variation of the toe angle as the optimal object, Optimization Design of Splitting Point has been studied. The results indicated that, the wheeled vehicle steering characteri -stics and the correspond between steering system and suspension has been improved by Optimization Design of Splitting Point. A reasonable optimization program for the optimize and design of vehicle is proposed in this paper.Keywords: Steering trapezium; Splitting point; Optimization designCLC NO.: U461.6 Document Code: A Article ID: 1671-7988(2020)05-93-03引言轮式车辆分段式转向梯形机构断开点的确定是转向梯形设计的难点[1-3]。
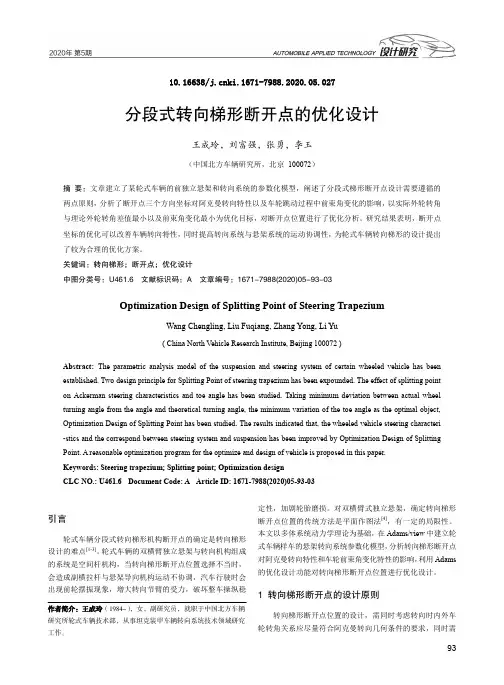
齿轮齿条式转向梯形的优化设计学院:车辆与能源学院专业:2012级车辆工程学号:S12085234009姓名:刘建霞日期:2014年4月15日齿轮齿条式转向器(如图1)具有结构简单紧凑,制造工艺简便等优点,不仅适用于整体式前轴也适用于前轮采用独立悬架的断开式前轴,目前被广泛地用于轿车、轻型客货车、微型汽车等车辆上。
与该转向器相匹配的转向梯形机构与传统的整体式转向梯形机构相比有其特殊之处,下面举一实例加以说明.图1 齿轮齿条式转向梯形机构运动实体模型题目:已知某微型汽车(如图2所示)各参数如下:1274.24K mm =,0()=2.5β主销后倾角,L(轴距)=2340mm ,=mm r (车轮滚动半径)266,=oy B y 梯形臂球头销中心的()42坐标.12mm ,由最小转弯半径得最大外轮转角为28o ,许用齿条行程[]62.3S mm =,选用参数624M mm =,试设计转向传动机构。
要求:(1)用优化方法设计此转向梯形传动机构。
(2)优化后校验,压力角40o α≤。
(3)计算出l 1长度,齿条左右移动最大距离。
图2 齿轮齿条转向梯形机构一 建模由转向基本要求可知,在不计轮胎侧偏时,实现转向轮纯滚动、无侧滑转向的条件是内、外轮转角符合Arckerman 理想转角关系:cot cot /O i k L θθ-=,如图3所示.图3 理想的内外轮转角关系(1)设计变量:选取变量 1(,,)X l h γ=图4 外轮一侧杆系运动情况由图4内外轮转角的关系得:221o 21o l cos(r )l [sin()h]2K M S l r θθ-=-+-+-(1) S M K h 22arctan +-=ϕ (2)221222221)2(2)2(arccos h S M K l l h S M K l ++--++-+=γ (3) i r θφγ=-- (4)联立上式可得o ()i g θθ=的函数关系式.对于给定的汽车和选定的转向器,转向梯形机构有横拉杆长l 1和梯形臂长m 两个设计变量。
采用齿轮齿条式转向器的转向梯形机构优化设计报告指导老师:***学生:黄志宇学号:********专业班级:车辆工程04班重庆大学方程式赛车创新实践班二〇一七年二月赛车转向系统是关系到赛车性能的主要系统,它是用来改变或恢复汽车行驶方向的系统的总称,通常,车手通过转向系统使转向轮偏转一定角度实现行驶方向改变。
赛车转向系统一股由方向盘、快拆、转向轴、转向柱、万向节、转向器、转向拉杆、梯形臂等部分组成。
其中,方向盘用于输入转向角度,快拆用于快速分离方向盘与转向柱,转向柱、转向轴、万向节共同将方向盘输入角度传递到转向器,转向器通过内部传动副机构将旋转运动转化为转向拉杆的直线运动,转向拉杆与梯形臂作用于转向节,实现车轮转向。
图1展示了转向系梯形结构,图2展示了赛车转向系统构成。
图1转向梯形机构图2赛车转向系统构成由于大赛组委会规则里面明确规定不允许使用线控或者电动转向,考虑到在赛车转向系统布置空间有限,且有严格的成本限制,以及轻量化的赛车设计目标,将赛车转向器范围限定机械式转向器。
目前,国内外的大多数方程式赛车采用齿轮齿条式转向器和断开式转向梯形结构。
●齿轮齿条式转向器齿轮齿条式转向器的传动副为齿轮齿条,其中,齿轮多与转向柱做成一体,齿条多与转向横拉杆直接连接,连接点即为断开点位置。
根据输出位置不同,分为两端输出式和中间输出式。
其主要优点是:结构简单,体积小,易于设计制作;转向器可选材料多样,壳体可选用招合金,质量轻;传动效率较高;容易实现调隙,当齿轮齿条或者齿条与壳体之间产生间隙时,可以通过安装在齿条背部的挤压力可调的弹簧来消除间隙;转向角度大,制造成本低。
其主要缺点是:传动副釆用齿轮齿条,正效率非常髙的同时,逆效率非常高,可以到达当汽车在颠簸路面上行驶时,路感反馈强烈,来自路面的反冲力很容易传递到方向盘;转向力矩大,驾驶员操纵费力,对方向盘的反冲容易造成驾驶员精神紧张,过度疲劳。
●断开式转向梯形结构根据转向器和梯形的布置位置的不同,断开式转向梯形又分为四类,分别为:转向器前置梯形前置,转向器后置梯形后置,转向器前置梯形后置,转向节后置梯形前置。
汽车断开式转向梯形机构的优化设计1. 断开式转向梯形数学模型推导 理想的左右转向轮转角关系图1为汽车前轮转向示意图。
为了避免在汽车转向时产生的路面对汽车行驶的附加阻力和轮胎磨损过快,要求转向系统即可能保证在汽车转向时,所有的车轮均作纯滚动。
显然,这只有在所有车轮的轴线都相交于一点时方能实现。
此交点被称为转向中心。
如图所示,汽车左转弯时,内侧转向轮转角α应大于外侧车轮的转角β。
当车轮被视为绝对刚体的假设条件下,左右转向轮转角α和β应满足Ackermann 转向几何学要求,如式(1)所示。
LB-=βαcot cot (1)其中:α-内侧转向轮转角; β-外侧转向轮转角;B -两侧主销轴线与地面相交点之间的距离; L -汽车前后轴距; R -转弯半径。
根据式(1)可得理想的右轮转角,如式(2)。
0tan arctan 1tan BLαβα=+⨯(2)同理,当汽车右转向时,Ackermann 转角关系如式(3)所示。
LB+=βαcot cot (3)根据式(3)可得理想的右轮转角,如式4所示。
0tan arctan1tan BLαβα=-⨯(4)实际的左右转向轮转角关系图2是一种含有驱动滑块的常用断开式转向梯形机构。
轮齿条转向机构将方向盘的旋转运动转化成齿条(滑块)的直线运动,继而驱动转向梯形机构实现左右前轮转向。
vαββαBLR图1 汽车转向示意图图2 由齿轮齿条转向机驱动的断开式转向梯形机构图中:1L -转向机齿条左右球铰中心的距离; 2L -左右横拉杆的长度; 3L -左右转向节臂的长度; w L -车轮中心至转向主销的距离;1S -转向齿条从中心位置向左的位移量; 2S -转向齿条从中心位置向左的位移量;y -转向齿条左右球铰中心连线与左右转向主销中心连线之偏距,图示位置取正值,反之取负值; 0S -直线行驶时,转向齿条左球铰中心和左转向主销的水平距离;0α-转向节臂与汽车纵轴线的夹角。
运用余弦定理和三角函数变换公式,经推导可得:222223cos cos()2()Cy S A B C AOB BOY L S y α--+-=∠+∠=+A 点的坐标值为:2222222222()2()C S y A B C BXa y S C y S A B C Ya y S ⎧⨯-⨯+-=⎪⎪⨯+⎨⨯+⨯+-⎪=⎪⨯+⎩其中:32A L S =-⨯,32B L y =-⨯,222223C L L y S =---;S -表示转向齿条左球铰中心和左转向主销中心的实际距离, 对于直线行驶时,0S S =;转向时,对于左转向轮:0S S S =-右转向轮:0S S S =+。
基于粒子群算法的汽车断开式转向梯形的优化设计
姚永玉;陈智勇;邓亚兵
【期刊名称】《中原工学院学报》
【年(卷),期】2017(028)003
【摘要】以转向梯形中杆件的实际尺寸、空间(转角)位置为设计变量,以对梯形臂和梯形底角的范围限制为约束条件,以实现最小转角误差为目标函数,建立转向传动机构的空间数学模型,并推导出转向梯形的运动学方程.利用粒子群算法对该模型进行优化,证明了优化方法的可行性.
【总页数】4页(P33-36)
【作者】姚永玉;陈智勇;邓亚兵
【作者单位】洛阳理工学院,河南洛阳471003;洛阳理工学院,河南洛阳471003;中国农业大学工学院,北京100089
【正文语种】中文
【中图分类】TH13
【相关文献】
1.断开式汽车转向梯形机构的优化设计 [J], 陈家起;詹明清
2.基于MATLAB的断开式转向梯形机构的优化设计 [J], 石启龙;杨建伟
3.汽车断开式转向梯形机构的优化设计 [J], 张立国;宁国宝
4.基于RecurDyn的大型矿用自卸车断开式转向梯形机构优化设计 [J], 陈娜;潘玉斌;满军城;
5.一种断开式转向梯形机构优化设计方法 [J], 韩振;胡晓燕;刘辉
因版权原因,仅展示原文概要,查看原文内容请购买。
断开式汽车转向梯形机构的优化设计
陈家起;詹明清
【期刊名称】《汽车技术》
【年(卷),期】1989(000)002
【总页数】7页(P11-17)
【作者】陈家起;詹明清
【作者单位】不详;不详
【正文语种】中文
【中图分类】U463.4
【相关文献】
1.断开式转向梯形机构的稳健优化设计模型 [J], 刘汪洋;宋小文;王晓晖
2.基于MATLAB的断开式转向梯形机构的优化设计 [J], 石启龙;杨建伟
3.汽车断开式转向梯形机构的优化设计 [J], 张立国;宁国宝
4.基于RecurDyn的大型矿用自卸车断开式转向梯形机构优化设计 [J], 陈娜;潘玉斌;满军城;
5.一种断开式转向梯形机构优化设计方法 [J], 韩振;胡晓燕;刘辉
因版权原因,仅展示原文概要,查看原文内容请购买。
断开式转向梯形机构的稳健优化设计模型
刘汪洋;宋小文;王晓晖
【期刊名称】《机电工程》
【年(卷),期】2011(028)004
【摘要】为解决传统优化设计方法中存在的最优解的函数值波动过大且容易违反约束的问题,将稳健设计运用于汽车断开式转向梯形机构的优化设计中.首先分别分析了稳健设计和转向机构的数学模型;其次在目标函数与约束中同时考虑运动副间隙的影响,建立了稳健优化设计模型.实例分析表明,与传统的优化方法相比较,该模型不仅可以得到较小的误差还具有较高的稳健性.研究结果表明,该方法有较好的可行性与实用性.
【总页数】4页(P429-431,443)
【作者】刘汪洋;宋小文;王晓晖
【作者单位】浙江大学能源工程学系,浙江杭州310027;浙江大学能源工程学系,浙江杭州310027;浙江大学能源工程学系,浙江杭州310027
【正文语种】中文
【中图分类】TH122
【相关文献】
1.断开式转向梯形机构设计及优化 [J], 陈俊;戴桂珍;夏国林
2.基于MATLAB的断开式转向梯形机构的优化设计 [J], 石启龙;杨建伟
3.汽车断开式转向梯形机构的优化设计 [J], 张立国;宁国宝
4.基于RecurDyn的大型矿用自卸车断开式转向梯形机构优化设计 [J], 陈娜;潘玉斌;满军城;
5.一种断开式转向梯形机构优化设计方法 [J], 韩振;胡晓燕;刘辉
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车断开式转向梯形机构的优化设计
1. 断开式转向梯形数学模型推导 理想的左右转向轮转角关系
图1为汽车前轮转向示意图。
为了避免在汽车转向时产生的路面对汽车行驶的附加阻力和轮胎磨损过快,要求转向系统即可能保证在汽车转向时,所有的车轮均作纯滚动。
显然,这只有在所有车轮的轴线都相交于一点时方能实现。
此交点被称为转向中心。
如图所示,汽车左转弯时,内侧转向轮转角α应大于外侧车轮的转角β。
当车轮被视为绝对刚体的假设条件下,左右转向轮转角α和β应满足Ackermann 转向几何学要求,如式(1)所示。
L
B
-
=βαcot cot (1)
其中:
α-内侧转向轮转角; β-外侧转向轮转角;
B -两侧主销轴线与地面相交点之间的距离; L -汽车前后轴距; R -转弯半径。
根据式(1)可得理想的右轮转角,如式(2)。
0
tan arctan 1tan B
L
αβα=+⨯
(2)
同理,当汽车右转向时,Ackermann 转角关系如式(3)所示。
L
B
+
=βαcot cot (3)
根据式(3)可得理想的右轮转角,如式4所示。
0tan arctan
1tan B
L
αβα=-⨯
(4)
实际的左右转向轮转角关系
图2是一种含有驱动滑块的常用断开式转向梯形机构。
轮齿条转向机构将方向盘的旋转运动转化成齿条(滑块)的直线运动,继而驱动转向梯形机构实现左右前轮转向。
v
α
β
β
α
B
L
R
图1 汽车转向示意图
图2 由齿轮齿条转向机驱动的断开式转向梯形机构
图中:
1L -转向机齿条左右球铰中心的距离; 2L -左右横拉杆的长度; 3L -左右转向节臂的长度; w L -车轮中心至转向主销的距离;
1S -转向齿条从中心位置向左的位移量; 2S -转向齿条从中心位置向左的位移量;
y -转向齿条左右球铰中心连线与左右转向主销中心连线之偏距,图示位置取正值,反之取负值; 0S -直线行驶时,转向齿条左球铰中心和左转向主销的水平距离;
0α-转向节臂与汽车纵轴线的夹角。
运用余弦定理和三角函数变换公式,经推导可得:
222
2
2
3cos cos()2()
Cy S A B C AOB BOY L S y α--+-=∠+∠=
+
A 点的坐标值为:
2222222222()2()C S y A B C B
Xa y S C y S A B C Ya y S ⎧⨯-⨯+-=⎪⎪⨯+⎨
⨯+⨯+-⎪
=⎪⨯+⎩
其中:
32A L S =-⨯,32B L y =-⨯,2
222
23C L L y S =---;
S -表示转向齿条左球铰中心和左转向主销中心的实际距离, 对于直线行驶时,0S S =;
转向时,对于左转向轮:0S S S =-
右转向轮:0S S S =+。
由此得到左转向轮转角随齿条运动的方程,如式(5)所示;右转向轮如式(6)所示。
当A 点位于O 点的左侧——即Xa>
B
时: 222
111102
32()
C y S A B C L y S απα⨯+⨯+-=+⨯⨯+
(5a )
当A 点位于O 点的右侧——即Xa>
2
B
时:
02
3{2()
L y S απα=--⨯⨯+
(5b )
当A 点位于O 点的左侧——即Xa>
B
时: 02
3{2()
L y S βαπ=-+⨯⨯+
(6a )
当A 点位于O
点的右侧——即Xa>
B
时: 030{βαπ=--
(6b )
2. 优化目标函数和约束条件的确定
优化目标函数的确定
由于现有的转向梯形机构并不能够完全满足Ackermann 转向几何学要求,实际上只能在一定的车轮转角范围内,使两侧车轮偏转角的关系大体上接近于理想关系。
同时,Matlab 软件中提供了非线性规划的相关优化函数,因此,本着最大限度地逼近理想的阿克曼转角的原则,我们采用离散化方法,给出了优化设计目标函数为:
201
()n
i F ββ==-∑
其中:
β-右侧转向轮的实际转角;
0β-右侧转向轮的理想转角;
n -取值次数。
当F 取得最小值时,即车轮实际转角与理想值最为接近,优化结果最为理想。
优化约束条件的确定
对于一般汽车,其方向盘最大行程大约为540︒
±(约三圈),轿车的转向系统传动比大约为12~20,转向轮最大转角约为27~45︒
︒。
依据该轿车设计要求,其转向轮最大转角设计为35︒
左右,而齿条的行程为70mm ±。
由于横拉杆和转向节臂之间主要是传递力的作用关系,因此,在传动过程中,两杆之间应该尽可能地保持小的压力角,以保证两杆间压力角在规定的范围内。
根据该轮边驱动电动车的布置尺寸和上述设计基本要求,确定各优化变量的取值范围为:
023[250,330];[300,390];[100,130];
[60,0]S L L y ====-
原车转向梯形尺寸设为设计变量的初值:
0280S mm =,2350L mm = , 3120L mm =,50y mm =-
3. 优化结果及验证
优化结果分析
利用非线性最小二乘法对该转向梯形进行优化,优化结果如下:
023296.7;333.3;129.9;
52.7S L L y ====-
车辆优化前后的理想和实际的汽车内外车轮转角的关系曲线如图3所示。
从图中可以看出,对于原转向梯形机构,当左轮转角超出10
10︒
︒-(负号表示右转弯)范围后,实际转角与理想值既已产生偏
差,左侧车轮转角为20︒时的偏差已达0.81︒,而在最大转角处的偏差为0.875︒
,相对误差为2.84%;而
优化后的转向梯形机构,当左侧车轮转角在20
30︒
︒-范围内变化时,实际值与理想值能够很好地相吻
合,只有在较大转角时,二者之间才产生了微小偏差,当左侧车轮转角达到最大时(约40︒
),右侧车轮
的实际转角与理想转角之间的差值为0.867︒
,相对误差为2.8417%。
在转向轮转角范围内,选取30个点,
计算优化目标函数值,对于原转向梯形机构,其函数值为0.0043,而优化后下降为0.0020。
(a) (b)
图3 汽车内外侧车轮转角关系
由于压力角影响着转向过程中的动力传递效率,优化后的转向梯形的转向节臂与转向横拉杆之间的压力角1χ的变化曲线如图4所示。
从图中可以看出,该压力角在车轮转角的大部分变化范围内都保持较小值,即较高的传动效率,只有当左侧(或右侧)车轮达到或者接近于左转(或右转)时的极限转角时,压力角才比较大,由于汽车进行极限转向的频率比较低,因此,优化结果可行。
图41χ变化曲线 图52χ变化曲线 图6转向系传动比变化曲线
转向横拉杆与转向齿条之间的压力角2χ变化如图5所示。
从图中可以看出,在整个车轮转角范围内,该压力角都保持了很小的值,即很高的传动效率,因此,优化结果可行。
虚拟样机试验验证分析
建立该车辆转向系统的虚拟样机模型,系统尺寸、位置参数采用优化后的参数,虚拟仿真试验结果如图3~5中的虚拟样机试验。
虚拟样机试验验证了优化结果的有效性。