机械与人 单元检测
- 格式:doc
- 大小:282.00 KB
- 文档页数:6
1沪科版八年级物理第十章《机械与人》单元测试(满分 :100分 时间:90分钟)一、单项选择题 (每题3分,共30分)1.下列工具中,属于省力杠杆的是A.瓶盖起子B.定滑轮C.天平D.镊子 2.三峡水库修建水坝,提高水位是为了增加水的A.内能B.重力势能C.弹性势能D.动能 3.下列关于力做功的说法,错误的是A .人提着箱子站在地面不动,手的拉力对箱子没有做功B .人把箱子从二楼提到三楼,手的拉力对箱子没有做功C .汽车在水平公路上匀速行驶,汽车所受重力对汽车有做功D .过山车向下运动过程中,车上乘客所受重力对乘客没有做功4.李明同学快速地由一楼跑到三楼的过程中,他的功率与下列哪个值最接近 A.5W B.50W C.500W D.5000W5.关于机器的功率,下列说法中正确的是A.机器的功率越小,做功越慢B.机器的功率越大,做功越多C.机器的功率越小,机械效率越低D.机器的功率越大,做的有用功越多 6.能用10N 的力提起重20N 物体的简单机械是 A.一个动滑轮 B.一个定滑轮C.杠杆D.一个定滑轮和一个动滑轮组成的滑轮组7.如图1所示是一个指甲刀的示意图,它由三个杠杆ABC 、OBD 和OEF 组成,用指甲刀剪指甲时,下面说法正确的是A.三个杠杆都是省力杠杆B.三个杠杆都是费力杠杆C.ABC 是费力杠杆,OBD 、OEF 是省力杠杆D.ABC 是省力杠杆,OBD 、OEF 是费力杠杆8.初三(l )班《 八荣八耻》 宣传栏中记述着:“某高楼大厦发生高空抛物不文明行为,一老太太被抛下的西瓜皮砸伤… … ”,被抛下的西瓜皮在下落过程中逐渐增大的物理量是 A .重力势能 B .动能 C .重力 D .密度9.五·一假期,小林和爸爸一起去登山,小林用了15min 登到山顶,爸爸用了20min 登上了山顶,爸爸的体重是小林的1.5倍,则小林与爸爸的登山功率之比为A.9∶8B.8∶9C.1∶1D.1∶910. 如图,把不同的实心小铁球放在相同的实验装置的斜面上自由滚下,撞击静止于水平面上的小木块上进行实验.在下列几种情况中,能说明物体的动能与物体的质量有关的是( )A.甲、乙B.甲、丙C.乙、丙D. 丙、丁二、填空题 (每空2分,共18分)11.建立物理模型是物理学研究问题的一种重要方法。

2. 机器人发展的三个阶段:①示教再现机器人第一代工业机器人是示教再现型。
这类机器人能够按照人类预先示教的轨迹、行为、顺序和速度重复作业。
②感知机器人第二代工业机器人具有环境感知装置,能在一定程度上适应环境的变化。
③智能机器人第三代工业机器人称为智能机器人,具有发现问题,并且能自主的解决问题的能力,尚处于实验研究阶段。
作为发展目标,这类机器人具有多种传感器,不仅可以感知自身的状态,比如所处的位置、自身的故障状况等,而且能够感知外部环境的状态,比如自动发现路况、测出协作机器的相对位置、相互作用的力等。
更为重要的是,能够根据获得的信息,进行逻辑推理、决策判断,在变化的内部状态与变化的外部环境中,自主决定自身的行为。
这类机器人具有高度的适应性和自治能力。
6.SCARA机器人,即Selective Compliance AssemblyRobot Arm,又名水平多关节机器人,是工业机器人应用非常广泛的构型。
SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。
另一个关节是移动关节,用于完成末端件在垂直于平面的运动。
SCARA机器人的特点是负载小、速度快,主要应用在快速分拣、精密装配等3C行业、食品行业等领域。
3.3.液压伺服系统主要由液压源、驱动器、伺服阀、传感器、控制器等组成。
液压传动的特点是转矩与惯量比大,不需要其他动力就能连续维持力。
6.Delta机器人可分为回转驱动型和直线驱动型。
回转驱动型Delta机器人,控制容易、动态特性好,但其作业空间较小、承载能力较低,故多用于高速、轻载的场合。
直线驱动型Delta机器人作业空间大、承载能力强,但其操作和控制性能、运动速度等不及旋转型Delta机器人,多用于并联数控机床等场合。
8.RV减速器的特点:①传动比范围大,传动效率高。
②扭转刚度大。
③在额定转矩下,弹性回差误差小。
④传递同样转矩与功率时,RV减速器较其他减速器体积小。
1. 机器人传感器有多种分类方法,如接触式传感器或非接触式传感器,内传感器或外传感器等。

机器人概论知到章节测试答案智慧树2023年最新山东交通学院绪论单元测试1.机器人的动作机构具有类似于人或其他生物体某些器官(如肢体、感官等)的功能。
()参考答案:对第一章测试1.科学家们预言:21世纪将是机器人与人和谐共处的时代,机器人产业将成为继汽车、计算机之后的第三个大产业,未来的战争将是一场机器人的战争。
()参考答案:对2.美国原子能委员会的阿尔贡研究所于1947年开发了遥控机械手,1948年又开发了机械式的主从机械手,这就是第一代遥控操作的机器人。
()参考答案:对3.1958年,被誉为“机器人之父”的美国人约瑟夫·恩格尔伯格创建了世界上第一家机器人公司——Unimation,正式把机器人向产业化方向推进。
()参考答案:对4.1920年,捷克斯洛伐克剧作家卡雷尔·凯培克在他的科幻情节剧《罗萨姆的万能机器人》中,第一次提出了()这个名词,被当作机器人的起源。
()。
参考答案:机器人5.人工智能已在机器人学方面进行的一些研究课题可以看出两者的密切关系,例如()。
参考答案:传感器信息处理;自然语言理解;专家系统;机器人规划第二章测试1.超大型机器人指的是负载能力1000 kg以上。
()参考答案:对2.工业机器人可以划分为:加工类、装配搬运类和包装类。
()参考答案:对3.我国沈阳新松机器人自动化股份有限公司于 2015年11月推出了一款包括生理信号检测、语音交互、远程医疗等功能的陪护机器人,它可服务于各类养老院和社区服务站。
()参考答案:对4.我国的()将工业机器人列为产业转型升级和智能制造的重点方向。
()。
参考答案:《中国制造2025》5.按照结构形态,负载能力和动作空间划分可分为:()。
参考答案:中型机器人;大型机器人;小型机器人和超小型机器人;超大型机器人第三章测试1.从20世纪80年代开始,美国国防高级研究计划局(DARPA)专门立项,制定了地面无人作战平台的战略计划,从此,在全世界掀开了全面研究移动机器人的序幕。

《人与机械》导学案一、学习目标1、了解机械的发展历程以及对人类社会的影响。
2、探讨人与机械的关系,包括相互依存、相互促进和潜在的冲突。
3、思考在机械高度发展的时代,人类应如何适应并引导其发展,以实现可持续的未来。
二、学习重难点1、重点(1)机械发展的重要阶段和关键技术突破。
(2)人与机械在生产、生活等方面的相互作用。
2、难点(1)分析机械发展对人类社会结构和文化的深层次影响。
(2)探讨人类在机械智能化时代面临的挑战和机遇。
三、知识链接1、工业革命:第一次工业革命以蒸汽机的发明和应用为标志,推动了机械制造业的快速发展;第二次工业革命以电力的广泛应用和内燃机的发明为主要特征,进一步提升了机械的效能和应用范围;第三次工业革命以计算机和信息技术为核心,使机械向自动化、智能化方向迈进。
2、机器人技术:从简单的工业机器人到具备感知、决策和学习能力的智能机器人,机器人在制造业、医疗、服务等领域的应用不断拓展。
四、学习过程(一)机械的发展历程1、古代机械在古代,人类就开始利用简单的机械原理来制造工具和器具,如杠杆、滑轮、斜面等。
这些原始的机械装置帮助人们完成了一些繁重的劳动,提高了生产效率。
例如,古埃及人利用滑轮系统建造金字塔,中国古代发明的水车用于灌溉农田。
2、工业革命与机械制造工业革命是机械发展的重要转折点。
蒸汽机的出现使得机械动力取代了人力和畜力,工厂生产得以大规模开展。
纺纱机、织布机等机械设备的发明改变了纺织业的生产方式,提高了产量和质量。
随着钢铁工业的发展,机械的制造材料和工艺得到改进,更加复杂和精密的机械逐渐涌现。
3、现代机械与自动化20 世纪以来,机械逐渐走向自动化和智能化。
数控机床、自动化生产线等设备的出现大大提高了生产的精度和效率。
在汽车制造、电子工业等领域,自动化生产已经成为主流。
同时,机器人技术的发展使得机械能够完成更加复杂和危险的任务。
(二)人与机械的相互依存1、机械对人类的帮助机械在各个领域为人类提供了巨大的帮助。
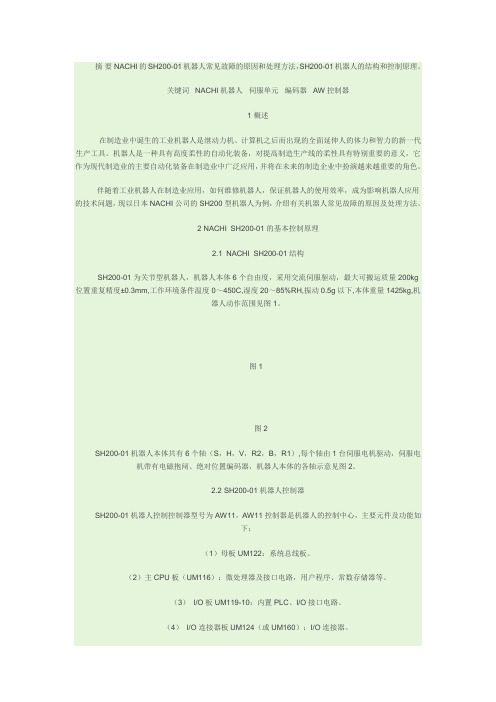
摘要 NACHI的SH200-01机器人常见故障的原因和处理方法,SH200-01机器人的结构和控制原理。
关键词 NACHI机器人伺服单元编码器 AW控制器1 概述在制造业中诞生的工业机器人是继动力机、计算机之后而出现的全面延伸人的体力和智力的新一代生产工具。
机器人是一种具有高度柔性的自动化装备,对提高制造生产线的柔性具有特别重要的意义,它作为现代制造业的主要自动化装备在制造业中广泛应用,并将在未来的制造企业中扮演越来越重要的角色。
伴随着工业机器人在制造业应用,如何维修机器人,保证机器人的使用效率,成为影响机器人应用的技术问题,现以日本NACHI公司的SH200型机器人为例,介绍有关机器人常见故障的原因及处理方法。
2 NACHI SH200-01的基本控制原理2.1 NACHI SH200-01结构SH200-01为关节型机器人,机器人本体6个自由度,采用交流伺服驱动,最大可搬运质量200kg 位置重复精度±0.3mm,工作环境条件温度0~450C,湿度20~85%RH,振动0.5g以下,本体重量1425kg,机器人动作范围见图1。
图1图2SH200-01机器人本体共有6个轴(S,H,V,R2,B,R1),每个轴由1台伺服电机驱动,伺服电机带有电磁抱闸、绝对位置编码器,机器人本体的各轴示意见图2。
2.2 SH200-01机器人控制器SH200-01机器人控制控制器型号为AW11,AW11控制器是机器人的控制中心,主要元件及功能如下:(1)母板UM122:系统总线板。
(2)主CPU板(UM116):微处理器及接口电路,用户程序、常数存储器等。
(3)I/O板UM119-10:内置PLC、I/O接口电路。
(4)I/O连接器板UM124(或UM160):I/O连接器。
(5)伺服单元:RFX1121(8轴带行走轴、工具轴);RFX1120(7轴带工具轴);由UM200、UM2 01、UM202、UM203构成,其中UM203为电机驱动和再生放电回路,UM202主驱动控制、伺服异常检测和控制电源,UM201制动、内部顺序控制;UM200为伺服单元的CPU板,与控制器CPU通信,与编码器通信及主控制。

沪科八《第十章机械与人》学习效果检测(解析版)(满分100分,时间60min)一、选择题(每小题3分,共39分)1.(2021贵州中考)下列说法正确的是()A.使用杠杆一定可以省力B.钢丝钳是费力杠杆C.定滑轮是等臂杠杆,可以改变力的方向D.滑轮组既可以省力也可以省功【答案】C【解析】使用杠杆时,若动力臂小于阻力臂,例如镊子,费力但省距离,故A错误;钢丝钳的动力臂大于阻力臂,所以钢丝钳是省力杠杆,故B错误;定滑轮实质是等臂杠杆,使用定滑轮不能省力,但能改变力的方向,故C正确;滑轮组既可以省力不能省功,故D错误。
故选C。
2.(2021广西梧州中考)如图所示的工具中,使用时属于费力杠杆的是()A.开瓶器开瓶盖B.筷子夹食物C.定滑轮提升物体D.天平称物体质量【答案】B【解析】起子在使用过程中,动力臂大于阻力臂,是省力杠杆,故A不符合题意;筷子在使用过程中,动力臂小于阻力臂,是费力杠杆,故B符合题意;定滑轮实质是动力臂等于阻力臂的杠杆,是等臂杠杆,故C不符合题意;天平的动力臂等于阻力臂,是等臂杠杆,故D不符合题意。
故选B。
3.(2021湖南岳阳中考)A中的杠杆和物体处于静止状态,B、C、D中的物体被匀速吊起,所有物体重力均为G,不计动滑轮重力、绳重和一切摩擦,则所用拉力F最小的是()A .B .C .D .【答案】D 【解析】根据杠杆的平衡条件1122Fl F l =可知杠杆平衡时12F G ⨯=⨯,故拉力A =2F G ;图B 中为定滑轮提升物体,不能省力,只能改变力的方向,绳端拉力B =F G ;图C 中使用滑轮组提升物体,动滑轮上有2段绳子承载,自由端拉力C 12F G =;图D 中使用滑轮组提升物体,动滑轮上有3段绳子承载,自由端拉力D 13F G =;其中D 图中自由端拉力最小。
故选D 。
4.(2021湖南衡阳中考)如图所示,是我国古代《墨经》最早记述了秤的杠杆原理,有关它的说法正确的是( )A .“标”“本”表示力,“权”“重”表示力臂B .图中的B 点为杠杆的支点C .“权”小于“重”时,A 端一定上扬D .增大“重”时,应把“权”向A 端移 【答案】D 【解析】“标”“本”表示力臂,“权”“重”表示力,故A 错误;杠杆绕着O 转动,故O 为支点,故B 错误;“权”小于“重”时,A 端可能上扬,因为杠杆平衡原理可知,平衡不仅与力有关还与力臂有关,故C 错误;增大“重”时,重与OB 的乘积变大,在权不变的情况下可以增大标,故应把“权”向A 端移,故D 正确。
2022年沪科新版八上物理《机械与人》单元测试卷一.选择题(共10小题)1.用下列简单机械匀速提升同一个物体(不计机械自重和摩擦),其中所需动力最小的是()A .B .C .D .2.下列关于杠杆五个名词的说法中,正确的是()A .力臂一定在杠杆上B .作用在杠杆上的动力、阻力方向一定相反C .力臂是支点到力的作用点的距离D .力的作用线通过支点其力臂为0。
3.如图所示,O 为杠杆的支点,第一次杠杆在重物G 和力F 1的作用下处于水平位置平衡。
如果第二次杠杆在重物G 和力F 2的作用下仍在图中位置保持平衡,下面关系中正确的是()A .F 2>F 1>GB .F 1=F 2=GC .F 1<F 2=G D .F 1>F 2=G4.如图这些常见的器具都应用了杠杆,下列属于省距离杠杆的是()A.动滑轮B.订书机C.羊角锤D.镊子5.用如图所示的均匀杠杆提升重物,已知OA=OB,设作用在A端的力F始终竖直向下,在将重物慢慢匀速提升到一定高度的过程中,判断正确的是()A.F的大小将保持不变B.F的大小先变大,后变小C.该杠杆是省力杠杆D.若将拉力F换成重物G,不可能在如图所示位置平衡6.下列说法正确的是()A.做功多的机械,机械效率一定高B.机械工作时功率越大,其工作时一定越省力C.有力对物体做功时,机械能可以保持不变D.被运动员投出去的篮球在空中运动过程中,运动员对篮球做了功7.如图所示的四种情景中,力做功的是()A.搬而未动的石头 B.举着杠铃不动C.叉车将货物提高 D.水平匀速移动的重物8.体重相同的李明和张东从一楼爬到三楼,他们同时出发,李明先到,张东后到。
此过程中()A.李明做功较多B.张东做功较多C.张东的功率大D.李明的功率大9.下列说法中正确的是()A.功率大的机械比功率小的机械做功快B.做功时间越长,机械功率越大C.机械做功越快,机械效率越高D.做功越多机械效率越高10.甲乙两个机械,甲机械的效率是70%,乙机械的效率是50%,则()A.使用甲机械做功省力B.使用乙机械做功多C.使用甲机械做功快D.以上说法都不对二.多选题(共5小题)11.如图所示,小华用滑轮组匀速提升一个重为600N的物体,物体上升的速度为0.1m/s,人拉绳的力F为250N,不计绳重和摩擦,下列说法正确的是()A.动滑轮重150NB.人拉绳做功的功率为25WC.若小华的体重为750N,则小华用这套装置提的最大物重为2100ND.若用这个滑轮组提升1200N的物体时,滑轮组的机械效率为% 12.如图所示,在轻质杠杆两端各挂体积相同的实心铁块和铜块,杠杆在水平位置保持不变。
沪科版八年级物理《第十章机械与人》单元评价检测精练精析(45分钟 100分)一、选择题(本大题共8小题,每小题5分,共40分)1.用下列简单机械,使重量同为G的物体都处于静止状态,不计摩擦、机械自重及绳的重量,其中用力最小的是( )2.(2018·烟台中考)在你学过的简单机械里既可以省力又可费力的机械是( ) A.杠杆B.定滑轮C.动滑轮D.滑轮组3.(2018·绥化中考)如图所示,下列简单机械中,省距离的是( )4.如图所示,不考虑绳子与滑轮之间的摩擦,人通过定滑轮拉住重为98 N的物体,当人拉绳子从A点慢慢移动到B点时,人对绳子的拉力和拉力所做的功为( )A.拉力逐渐增大,拉力所做的功为98 JB.拉力的大小不变,拉力所做的功为98 JC.拉力的大小不变,拉力所做的功为294 JD.拉力的大小不变,拉力所做的功为392 J5.(2018·武汉中考)航模小组的某位同学在操场上利用如图所示的电动遥控直升飞机进行训练,他操作遥控器,使重为3 N的飞机从水平地面由静止开始竖直上升,飞机先后经历加速、匀速、减速三个阶段,然后悬停在距离地面10 m 的高度处,飞机竖直上升的总时间为12 s,匀速上升阶段的速度为1 m/s。
假设飞机在空中的受力情况可以简化为仅受到重力和竖直向上的升力,则下列说法正确的是( )A.在离开地面的过程中飞机对地面的压力先增大后减小B.在上升阶段飞机受到的升力大于重力C.在上升阶段飞机升力的功率为2.5 WD.在悬停阶段飞机升力的功率为3 W6.如图是由相同的滑轮组装的滑轮组,甲乙两人分别用两装置在相等时间内将质量相等的重物匀速提升相同的高度,空气阻力、摩擦、滑轮和绳子的质量均不计,下列说法正确的是( )A.甲的拉力是乙的拉力的3倍B.乙拉绳子的速度大小是甲拉绳子速度大小的2倍C.甲拉力的功率大于乙拉力的功率D.如果考虑滑轮质量,左图装置的机械效率比右图的小7.(2018·广州中考)如图所示的剪刀剪纸机械效率为80%,这表示( )A.若作用在剪刀上的动力是1 N,则阻力是0.8 NB.若作用在剪刀上的阻力是1 N,则动力是0.8 NC.若作用在剪刀上的动力做功1 J,则有0.2 J的功用于剪纸D.若作用在剪刀上的动力做功1 J,则有0.8 J的功用于剪纸8.跳远运动的几个阶段如图所示,则运动员( )A.助跑阶段机械能不变B.起跳时机械能为零C.经过最高点时动能最大D.经过最高点时重力势能最大二、填空题(本大题共6小题,每空2分,共28分)9.(2018·连云港中考)如图是生活中常见的杠杆,其中属于省力杠杆的是_____(填写字母符号),其中属于费力杠杆的是_________(填写字母符号)。
第十章《简单机械》单元测试
一、选择题:(每题3分,共24分)
1.使用杠杆为我们的生活带来方便,下列杠杆的使用能够省距离的是( )
A .
开瓶器
B . 镊子
C .
钳子
D .
自行车手闸
2. 如图所示,是体能测试中掷出的实心球运动的情景,下列说法正确的是( ) A . 实心球离开手后继续前进,是由于受到惯性的作用 B . 实心球在b 点时,处于平衡状态
C . 实心球从a 点运动到c 点的过程中,重力做了功
D . 在实心球从b 点运动到c 点的过程中,动能转化为重力势能
3.农业部门利用飞机喷洒农药消灭蝗虫.当飞机在某一高度水平匀速飞行喷洒农药时,它的( ) A .动能不变,势能不变 B .动能减少,势能增加 C .动能增加,势能减少 D .动能减少,势能减少
4.如图所示,斜面高为1m ,长为4m ,用沿斜面向上大小为75N 的拉力F ,将重为200N 的木箱由斜面底端匀速缓慢拉
到顶端,下列关于做功的判断正确的是:
A.木箱受到重力做功的大小为800J
B.木箱受到斜面摩擦力做功大小为100J
C.木箱受到合力做功的大小为125J
D.木箱受到斜面的支持力做功大小为200J
5.起重机将建筑材料由地面提升到楼顶,第一次用15000N 的竖直拉力F 1将材料甲匀速提升15 m ;第二次用10000N 的竖直拉力F 2将材料乙匀速提升15m .对于上述两个过程,下列说法中正确的是( ) A .甲的速度一定等于乙的速度 B .甲的质量一定大于乙的质量
C .拉力F 1做的功一定大于拉力F 2做的功
D .甲运动的时间一定小于乙运动的时间 6.下列关于功率的说法正确的是( )
A .功率大的机器做的功一定多
B .功率大的机器做功时间一定短
C .功率大的机器做功一定快
D .功率大的机器机械效率一定高
7. 用一个定滑轮和一个动滑轮组成的滑轮组把重150N 的物体匀速提升1m,,不计摩擦和绳重,滑轮组的机械效率为60%.则下列选项中错误的是 ( ) A .有用功一定是150J B .拉力大小一定是125N C .总功一定是250J D .动滑轮重一定是100N
8、图中是一个两面光滑的斜面,∠β大于∠α,同一个物体分别在AC 和BC 斜面受拉力以相同的速度匀速运动到C 点,所需拉力分别为F A 、F B ,所做功分别为W A 、W B ,拉力做功的功率分别为P A 、P B ,则( )
A .F A =F
B ,W A =W B ,P A =P B B .F A <F B ,W A =W B ,P A <P B
C .F A <F B ,W A <W B ,P A <P
B D .F A >F B ,W A >W B ,P A >P B
二.填空题:(每空1分,共20分)
9.在探究”汽车的速度”的实验中,甲乙两辆质量相同的汽车在同一水平地面上做直线运动的s-t 图象如图所示。
由图可知,甲乙两车牵10.做功的两个必要因素是:一、 ;二、 。
=
17.如图,不计摩擦和绳重,用200N竖直向上的拉力F将480N重的物体G以0.3m/s的速度匀速提升,则滑轮组的机械效率η= ,拉力F的功率P= W.
三、作图与实验探究(31分)
18.如图所示,用起子开启瓶盖,请确定支点O的位置,画出F的力臂.
19.如图所示,画出使轻质杠杆保持平衡的最小力F的示意图和对应的力臂.
20.用如图所示的滑轮组提升重物,要求绳子自由端移动的速度是物体
上升速度的2倍,请在图上画出绕线的方法.
21.在探究“杠杆平衡条件”的实验中,采用了如图所示的实验装置.
选用图乙探究的是动能与质量的关系,得出的结论
四、计算题:(25分)
24.(8分)按照规定,我国载货车辆的轮胎对地面的压强应控制在7×105Pa以内。
某型号
货车部分参数如表所示。
司机师傅在执行一次运输任务时,开着装满沙子的货车在一段平直
的公路上匀速行驶8km,所用时间是6min,该路段限速60km/h(取g=10N/kg,ρ砂
=2.5×103kg/m3)。
(1)车厢内所装沙子的质量是多少?(2)货车的速度为多少km/h?
(3)货车轮胎对地面的压强是多少?(4)货车在这段公路上行驶时所受阻力为车重的0.03倍,这段时间内货车牵引力所做的功和功率分别是多大?
25.(5分)斜面也是一种简单机械。
如图5所示,已知斜面上木箱的质量m=40kg,人对木箱的拉力F=75 N,斜面长s=4 m,斜面高h=O.5 m。
求:①木箱受到的重力(g取10 N/kg);
②斜面的机械效率。
26.(6分)如图9所示,在50N的水平拉力F作用下, 重800N的物体沿水平地面做匀速直线运动, 物体与地面间滑动摩擦力为120N.则滑轮组的机械效率为多少?若物体的速度为0.2m/s,则1min内拉力做的功为多少?
27.(6分)用如图所示滑轮组在15s内将重1000N的物体匀速上升了3m,人用拉力的F为400N,不计绳重和摩擦力.求:(1)动滑轮的重;(2)绳子自由端拉力F的功率;(3)滑轮组的机械效率;(4)若将重物的重力增加200N后,用这滑轮组将重物匀速提高相同的高度,该滑轮组的机械效率是多少?(结果百分数保留一位小数)
9、,。
10、,。
11、。
12、,,,。
13、,。
14、。
,。
15、。
16、,,。
17、,。
18、 19、 20、
21、(1),,(2),,(3),(4),。
22、(1),(2),(3),(4),,
(5)。
23、(1),,,(2),(3),,(4) , .
24、
25、
26、
27、。