汽车ABS电子控制单元综合性能测试试验台
- 格式:pdf
- 大小:445.47 KB
- 文档页数:4

基于Labcar的ABS控制器HIL测试孙陈迪;过学迅;裴晓飞;齐志权【摘要】在VDYM模型基础上完善了ABS仿真模型,将其下载到RTPC工控机中实时运行.利用Labcar IP中对硬件板卡进行配置与连接,并通过试验环境EE对数据进行监控和记录.在高/低附着路面下的ABS硬件在环测试表明,所得到的速度变化曲线和轮缸压力曲线更接近真实道路下的试验结果,从而验证了该系统能够满足ABS控制器进行硬件在环测试的需要.【期刊名称】《武汉理工大学学报(交通科学与工程版)》【年(卷),期】2014(038)006【总页数】4页(P1358-1361)【关键词】车辆工程;防抱死制动系统;逻辑门限值;仿真模型;硬件在环测试【作者】孙陈迪;过学迅;裴晓飞;齐志权【作者单位】武汉理工大学现代汽车零部件技术湖北省重点实验室武汉 430070;武汉理工大学现代汽车零部件技术湖北省重点实验室武汉 430070;武汉理工大学现代汽车零部件技术湖北省重点实验室武汉 430070;北京理工大学机械与车辆学院北京 100081【正文语种】中文【中图分类】U461.30 引言现代汽车电子控制系统(ECU)的开发中广泛采用了“V 模式”流程[1].该流程主要分为5个环节:离线功能设计、快速控制原型(RCP)、目标代码生成、硬件在环(HIL)、标定与匹配.其中,HIL测试是“V 模式”开发流程中验证ECU核心功能的重要环节[2-4].目前市场上主流的硬件在环仿真系统包括dspace,ETASLabcar,Matlab xPC和Labview RT 等.相较而言,在ETAS Labcar的仿真工控机(RTPC)中运行Linux实时操作系统,基于Ethernet网络的分布式架构,通过对板卡的灵活配置可满足不同被测系统的需求[5-6].由于Labcar的轮速板卡ES1337 可以模拟各种类型的轮速信号,特别适合用于ABS/ESP 系统的硬件在环测试[7].汽车防抱死制动系统(ABS)作为一种成熟电控产品,已经在各类汽车上得到广泛应用.目前ABS ECU 一般采用逻辑门限值算法,根据车轮加减速度和参考滑移率作为门限值进行增压,减压和保压调节,使得车轮滑移率在最优值附近波动[8].因此,ABS ECU 的性能与车辆动力学模型、轮胎模型、道路环境以及制动系统等因素密切相关[9-10].本文主要针对基于逻辑门限值的ABS控制器进行硬件在环测试.首先建立了HIL 的测试体系,介绍了Labcar的软硬件平台.在VDYM 人-车-路模型的基础上,完善了HIL 测试所需的ABS仿真模型.最后联立液压制动台架,对ABS ECU 进行了高/低附着路面下性能验证.通过HIL测试,可以方便的对控制算法和模型参数进行及时的修改以达到最佳控制效果.1 ABS硬件在环体系基于Labcar软硬件平台建立的ABS硬件在环仿真系统如图1所示,包括Labcar PC,RTPC、硬件板卡、ABS ECU 和液压制动系统5个部分.系统工作流程如下:在Labcar PC的IP软件中新建项目文件,并对硬件板卡进行配置.待添加ABS仿真模型后,连接模型中的输入输出模块与板卡,经过编译通过Ethernet网下载到RTPC中.RTPC不仅通过相关板卡接收来自液压制动系统的轮缸压力信号,并且将模型实时计算得到的轮速信息,通过相关板卡输送给ABS ECU .而ABS ECU 则通过电磁阀和电机的动作指令调节轮缸的制动压力.在HIL 测试中,实验人员可利用EE 软件全程监控和数据记录,并对模型参数进行修改.图1 硬件在环测试系统2 VDYM 模型剪裁在ABS HIL 测试中,仿真模型的精度直接决定了测试结果的有效性.如果模型过于简单,则无法反映车辆动力学的真实特性;模型过于复杂则会影响其计算速度,仿真结果也较难收敛.VDYM 模型是ETAS公司专为博世ABS/ESP控制器所开发的Matlab/Simulink 模型,能较好的满足仿真实时性和精确性的要求.根据ABS HIL测试体系的要求,对该模型进行适当剪裁.2.1 驾驶员模型在驾驶员模型中,可以依据驾驶员的意愿进行转向、离合、换挡、加速、制动及设定巡航车速等一系列操作.在对车辆的横向控制中,主要是通过改变方向盘的转向角度来实现的;而纵向控制中,需要设定驾驶员的期望车速.在VDYM 模型中,上述两个参数分别用DriverStimSteeringWheel-Angle和U_TargetSpeedStim 来表征,并且均可在用户界面EE中以图形化的方式直接修改具体数值.在ABS试验中,可将方向盘转角设置为0,即车辆保持直线行驶;而目标车速则可根据ABS 制动时的初始车速进行设置,本试验中设为110 km/h.2.2 道路模型道路模型需要尽可能真实的还原车辆行驶环境.在VDYM 模型中,不仅可以选择道路的类型,如直道、环形道路、双移线道路等,还能方便的设置路面附着系数.通过修改变量my_LF,my_LR,my_RF和my_RR 的数值,能够独立的表征各个车轮所处的路面附着系数,因此可以灵活的将路面类型配置成高/低附着,对开/对接等多种形式.在本试验中,需要通过StimLane将路径类型设定为直道;而对于高附着路面和低附着路面,附着系数分别设为0.7和0.3.2.3 车辆模型VDYM 的车辆模型由发动机模型、动力传动模型、制动模型以及车辆动力学模型四部分组成.由于本试验主要考虑的是制动工况,并且采用了真实的液压制动系统,因此这里重点针对车辆动力学模型进行剪裁.首先断开车辆动力学模型与制动模型之间的连接,通过Input_LF,Input_RF,Input_LR,Input_RR 直接将采集到的4 路轮缸压力大小,换算成制动力矩输入到车辆动力学模型中.同样,模型计算得到的4路轮速数值Veh_v_Wheel_LF,Veh_v_Wheel_RF,Veh_v_Wheel_LR,Veh_v_Wheel_RR,通过轮速模拟板卡ES1337输送给ABS ECU,从而将ABS ECU、VDYM 模型与液压制动系统构成闭环控制系统.3 ABS液压制动台架在实际应用中,通过纯数值仿真方法设计出的控制器在系统实时控制中可能得不到期望的控制效果,这是因为在纯数值仿真中忽略了实际系统的某些特性或参数.同样对于汽车制动系统,由于存在强非线性和滞后性,很难准确的建立起系统的数学模型,仅仅把数学模型作为实际对象的近似表示,拟合的结果往往不能满足实际要求.因此,这里采用ABS控制器和制动系统实物来替代VDYM 中的部分虚拟模型,从而构建HIL 测试所需的闭环控制系统.在ABS逻辑门限值方法中,有三个重要的组成部分,即路面识别模块、参考车速估计模块和门限值(车轮减速度/滑移率)标定模块.基于HIL控制架构,可以非常方便的对每个算法模块或其组合进行验证,见图2.图2 ABS控制器开发流程为了加快ABS控制器的开发进度,开始时直接使用VDYM 模型中的车轮滑移率,从而专注于对滑移率门限值的标定.待不同路面条件下的逻辑门限值确定后,再将Labcar的轮速模拟板卡提供的四路轮速引入,将所估计的参考车速与车辆模型提供的车速进行对比验证.在此基础上加入路面识别环节,并用模型中所设置的路面类型对其算法进行修正.这样从最小闭环控制起,通过对各个模块的算法累加,即能最终完成ABS控制器的开发.由于路面模型无法模拟路面的垂向颠簸度,因此与实际ABS控制器相比,唯一不同的是无法设计车辆过沟/过坎工况的算法补偿. 图3给出了ABS液压制动台架.压力调节器采用大陆MK60 HCU,并将12个电磁阀和电机的控制线引出与ABS控制器的驱动电路相连.制动轮缸采用迈腾原车的前后盘式制动器,并在轮缸入口加装了压力传感器,将测得的压力信号反馈到RTPC 的仿真模型中.与传统ABS 液压制动台架稍有不同的是,这里取消了电子真空助力器,而是直接使用电机泵油来主动建压.一旦通过EE的GUI界面使能ABS控制开关,立即将主缸压力建立至12MPa(足以使车轮抱死),然后通过控制8个轮缸电磁阀的通断来调节轮缸压力,从而避免车轮抱死.图3 ABS液压制动台架4 实验分析基于上述HIL 测试平台,就可以方便地对ABS ECU 完成各种性能考核,对于不同路面条件(高/低附着、对开/对接),不同初始车速(低速/高速),不同载荷(空载/满载),离合器接合/分离下的ABS测试,只需要在EE 界面修改VDYM 模型中相关参数即可.为了对纯软件仿真与硬件在环仿真结果进行比较,将左前轮与右后轮接入硬件在环系统,右前轮与左后轮处于纯软件仿真模式.这里给出两组ABS典型路面下的HIL测试结果.4.1 高附着路面将路面附着系数设置为0.7,初始制动车速设定为110km/h.图4反映了ABS制动过程中速度、滑移率以及轮缸压力的变化情况.图4 高附着路面测试结果图4a)左前轮和右后轮的轮速波动相对偏大,同时单次ABS循环的周期较长.图4b)也反映出虽然4个车轮滑移率的均值相当,但右前轮和左后轮的滑移率被控制在0.1~0.2之间,而左前轮和右后轮的滑移率的变化范围为0.05~0.4.这是由于实际液压制动系统的响应滞后引起的,从图9c)代表的轮缸压力曲线也能体现.左前轮和右后轮的初始建压时间约有0.5s的延迟,同时增减压的速率也相对较慢,从而导致ABS制动中的控制循环次数较少.4.2 低附着路面将路面附着系数设置为0.3,初始制动车速设定为110km/h.ABS制动下的速度、滑移率和压力曲线见图5.由图5可知,在低附着路面上由于液压制动系统导致的相关结论仍然适用,并且减压速率更慢.同时相对于高附着路面,ABS 的调控次数显著增多(左前轮多6次;右后轮多4次),制动时间显著延长(多5.9s).如图5a),b)所示,轮速波动及滑移率变化范围更加明显,而图5c)表明,轮缸压力的调节范围由高附着的6~10MPa降至1~3 MPa,与实际ABS制动特性相符合.图5 低附着路面测试结果5 结束语1)由实验结果可知,HIL测试与纯数值仿真相比,由于接入了真实的液压制动系统,ABS 控制器的逻辑参数更具有实际意义.2)与实车测试相比,基于Labcar的硬件在环测试能够方便地进行各种工况下的ABS测试,同时可以根据测试结果反复标定逻辑门限值,为快速开发ABS控制器提供了一种有效的手段.3)下一步可结合Labcar的故障注入功能,着重完善ABS控制器的故障诊断逻辑,为其产品化打下基础.参考文献[1]张为,王伟达,车坚志,等.基于V 模式的机电复合传动能量管理控制系统设计[J].农业机械学报,2012,43(10):1-7,13.[2]SCHUETTE H,WAELTERMANN P.Hard-warein-the-loop testing of vehicle dynamics contr-ollers-A Technical Survey[C].SAE Paper,2005-01-1660,2005.[3]CHUL S.Evaluation of motor characteris-tics for hybrid electric vehicles using the hardware-in-theloop concept[J].IEEE Transactions on Vehicu-lar Technology,2005,54(3):817-824.[4]MARTIN A,EMAMI M A.Dynamic load emulation in hardware-in-the-loop simulation of robot manipulator[C].IEEE Transactions on Industrial Electronics,2011,58(7):2980-2987.[5]郑朝武.基于LabCar的ISG 混合动力电动汽车控制策略仿真与测试[D].杭州:浙江大学,2011.[6]李淑英.基于LabCar2AT 的硬件在环仿真系统开发[D].长春:吉林大学,2009.[7]张云清,熊小阳,陈伟,等.基于车轮减速度及滑移率的ABS联合仿真研究[J].系统仿真学报,2008,20(8):2171-2176.[8]王伟达,丁能根,张为,等.ABS逻辑门限值自调整控制方法研究与试验验证[J].机械工程学报,2010,46(22):90-95,104.[9]陈炯,王会义,宋健.基于滑移率和减速度的ABS模糊控制仿真研究[J].汽车工程,2006,28(2):148-151,180.[10]张为,丁能根,余贵珍,等.汽车ABS电子控制单元综合性能测试试验台[J].农业机械学报,2009,40(9):37-40.。


汽车 EPS 试验台的设计及试验研究随着汽车行业的不断发展,其安全性越来越得到广泛的关注,电动助力转向系统(EPS)作为安全的重要保障,日益得到广泛的应用。
为了确保EPS在汽车中的稳定性和可靠性,在其研发和设计阶段需要进行严谨的试验和研究。
因此,本文设计了一种汽车EPS试验台,并进行了试验研究,旨在为EPS的研发提供可靠的基础数据。
一、汽车EPS试验台设计1.试验框架结构设计试验框架结构主要由试验用台架、试验悬挂系统、EPS测试系统组成。
台架为I型钢焊接而成,尺寸为1500mm*1500mm*1500mm。
试验悬挂系统采用四柱式气动拉杆,并配备防震圆片。
EPS测试系统由EPS测试台、EPS调制电源、电压表组成。
2.试验系统设计EPS测试台由测试工位,操纵机构,转向轮和传感器等组成。
测试工位上设有反力装置,可减小EPS系统的负荷。
操纵机构采用机械操纵和电子操纵两种方式,能够通过转向轮对EPS 进行控制。
传感器采用离子钠级别的压电传感器和光学传感器,可对试验数据进行采集和处理。
EPS调制电源主要是对EPS系统进行电气测试时所采用的电源,可承受EPS测试过程中的高电压电流。
电压表主要用于测试EPS系统的电压。
二、试验研究为了检测EPS系统在不同环境中的性能表现,我们针对EPS 的转弯力矩、电机功率、功率因数、噪音和振动等参数进行了试验研究。
1.转弯力矩试验通过对EPS系统进行不同强度的转弯,比较输出力矩,得到EPS的转弯力矩曲线。
测试结果表明,EPS的转弯力矩主要受到转弯角度和EPS系统的真实负载等因素的影响,实验数据可用于优化EPS转向系统的控制算法。
2.电机功率试验在不同的速度下,对EPS系统功率进行试验研究,掌握其转向过程中的功率消耗情况。
实验结果表明,EPS的运行效率受到不同运行状态、动力负载以及环境温度的影响,功率消耗也存在明显差异。
3.功率因数试验在不同电压下,对EPS系统的功率因数进行试验研究。

汽车制动实验台动力系统设计目录第一章绪论 (4)1.1选题背景 (4)1.1.1 选题的目的和意义 (4)1.1.2 国内外汽车试验制动台的发展的现状: (6)1.1.3 台架制动实验台的特点及发展前景 (8)1.2本课题的研究工作 (9)第二章传动方案选择及论证 (10)2.1传动方案的设计与论证 (10)2.1.1传动方案的要求 (10)2.1.2 传动方案的拟定 (11)2.2传动方案的内容与工作制动试验台原理 (11)2.2.1传动方案的内容 (11)2.2.2制动实验台的工作原理 (12)第三章制动实验台结构设计计算 (13)3.1引言: (13)3.2滚筒选择 (13)3.2.1 滚筒直径的选择 (13)3.2.2 滚筒长度的选择 (13)3.2.3 滚简转速的选择 (13)3.2.4 车轮与滚筒间附着系数的选择 (14)3.2.5 安置角对测试车轮稳定性的影响 (14)3.2.6 滚筒中心距L的选择 (15)3.3车轮的选择与计算 (15)3.3.1车轮直径计算 (15)3.3.2车轮所需转速计算 (15)3.4滚筒的计算 (15)3.4.1滚筒质量计算 (15)3.4.2滚筒转动惯量计算 (16)3.4.3滚筒功率计算 (16)3.5电动机的选择 (16)3.6.齿轮传动计算 (18)3.6.1 车速为100km/h时的齿轮传动 (19)3.6.2齿轮传动分析 (26)3.7轴设计 (28)3.7.1确定轴的最小直径 (29)3.7.2从动轴设计 (30)3.7.3主动轴设计 (30)3.8轴承和轴承座设计 (31)3.81 选择轴承型号 (31)3.82 轴承座型号 (32)3.9主从滚筒间齿轮传动设计 (32)3.10汽车制动实验台框架参数设计 (32)3.10.1 槽钢的选择 (33)3.10.2 制动试验台框架结构参数 (34)3.11带传动设计 (34)3.12电磁离合器地选择 (35)3.12.1.按计算扭矩选择电磁离合器 (35)3.12.2 牙嵌式电磁离合器的结构与工作原理 (35)3.13本章小结 (36)第四章结论和建议 (38)4.1本论文的结论 (38)致谢 (39)参考文献 (40)附录 (41)制动器和制动测试试验的概况 (41)A P RIMER ON B RAKES AND B RAKE T ESTING (47)第一章绪论1.1 选题背景汽车制动性能的检测,作为机动车安全检测中最重要项目之一,一直是大家关注的焦点。

前言由于发动机输出的转速和转矩与车辆驱动轮所需的转速和转矩之间存在着矛盾,须设立传动系来调节发动机的性能,即通过传动系改变传动比,将发动机的动力传递给驱动车轮,以适应外界负荷与道路条件变化的需要。
车辆行驶性能的好坏,不仅取决于发动机,而且在特别大程度上还依靠于传动系以及传动系与发动机的匹配。
变速器是现代汽车重要的组成局部。
研究变速器与发动机的联合工作特性,需要对变速器的性能进行台架试验,变速器的维修需要进行故障诊断试验。
国内变速器性能检测设备尚处于研究开展时期。
本文所设计的变速器性能检测试验台能够为变速器的性能或故障诊断提供参考数据,具有以下功能:提供的动力能模拟变速器在汽车内的使用工况;负载能模拟汽车的道路行驶阻力;能检测变速器的特性参数及系统油压、流量、温度等数据。
随着汽车市场的不断扩大,汽车行业对变速器的需求不断增长,对汽车变速器的质量要求也越来越高,这就要求既要有高科技的加工手段,又要有高质量的检测设备,但目前国内采纳的检测手段还不能全部满足现状的要求,要紧表现在检测产品单一,跟不上产品的变化,检测手段落后,不能满足某些指标的检测,检测效率低,不能满足生产需要。
因此研制一台手动汽车变速器试验台,就更显得迫切和需要。
依据要求本人设计了一款汽车变速器性能检测试验台,由于时刻仓促和知识水平有限,论文中的错误和缺乏在所难免,请各位老师给予批判指正。
第1章汽车变速器试验台概述1.1汽车变速器试验台资料调查变速器是现代汽车重要的组成局部。
研究变速器与发动机的联合工作特性,需要对变速器性能进行台架试验,变速器的维修需要进行故障诊断。
对变速器检测工程及检测方法进行了研究,设计了适合汽车维修企业使用的变速器试验台。
汽车变速器性能检测试验台能够为变速器的性能或故障诊断提供参考数据,具有以下功能;提供的动力能模拟变速器在汽车内的使用工况;负载能模拟汽车的道路行驶阻力;能检测变速器变速器的特性参数及系统油压、流量温度等数据。
2009年9月农业机械学报第40卷第9期汽车ABS 电子控制单元综合性能测试试验台3张 为 丁能根 余贵珍 王伟达 徐向阳(北京航空航天大学交通科学与工程学院,北京100191) 【摘要】 开发了一种用于ABS 电子控制单元室内性能测试的试验台,用于测试其控制功能和故障诊断功能。
该试验台主要由轮速再现装置、测控系统、数据采集系统、基础制动系统及恒压油源等组成。
台架试验结果表明,试验台能够测试ECU 的控制功能。
利用该试验台可以方便地设置轮速传感器故障,以实现ECU 故障诊断功能的测试。
关键词:汽车 防抱死制动系统 性能检测 试验台中图分类号:U463152+6;U46715+25文献标识码:ADevelopment of Integrative Performance T est Bench of the V ehicle ABS ECUZhang Wei Ding Nenggen Yu Guizhen Wang Weida Xu Xiangyang(School of T ransportation Science and Engineering ,Beihang U niversity ,Beijing 100191,China )AbstractThe ABS ECU indoor performance testing bench was developed to test the ECU fault diagnosis and control functions.The test bench consisted of the reoccurrence equipment of wheel speed signals ,the measuring and controlling system ,the data collection system ,the basic brake system and the constant 2pressure hydraulic power.The test result shows that the bench can satisfy the requirement of testing the ECU control.It was easy to set the faults of sensors ,and easy to test the ECU diagnosis function for the test bench.K ey w ords Vehicle ,ABS ,Performance test ,Test bench收稿日期:2008209211 修回日期:20082102273国家自然科学基金资助项目(50475003)作者简介:张为,博士生,主要从事汽车动力学及其控制方法研究,E 2mail :zhw @ 引言汽车防抱死制动系统(ABS )是一个与车辆系统、轮胎力学特性、液压制动系统、行车环境等因素紧密相关的非线性控制系统。
由于车辆系统和行车环境的复杂性,单纯依靠实车道路试验不仅重复性较差而且需要专用试验场地,存在投资大、费用高、试验准备时间和试验时间均较长、发现和解决问题费时等不足,而且路试过程中存在一定危险[1~2]。
为了在研发和生产中更合理地测试ABS 性能,有必要开发与实车道路试验互补的室内试验台。
本文研究一种ABS 电子控制单元(ECU )性能检测的室内试验台,用于ECU 控制功能和故障诊断功能的测试。
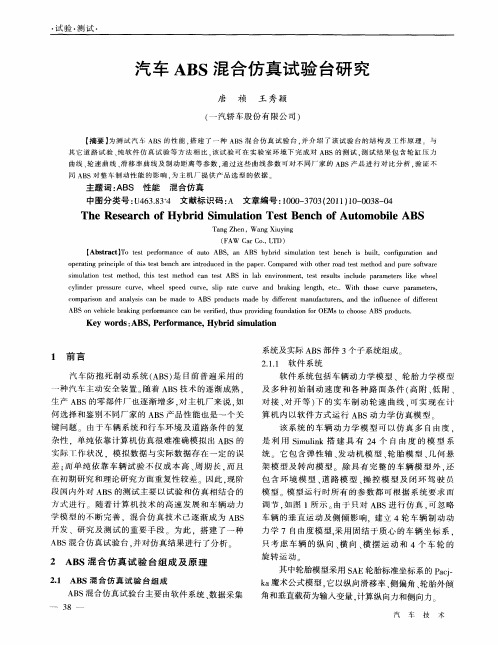
1 试验台结构和工作原理图1为汽车ABS ECU 综合性能测试试验台的工作原理图。
该试验台主要由轮速再现装置、测控系统、数据采集系统、基础制动系统、恒压油源、故障设定装置和用户操作界面等组成。
测控系统中的上位机预先存储多种初始制动速度和路面条件(即高附着、低附着、对接和对开等)下的实车制动轮速曲线,测试前用户根据需要选择制动初速与路面工况,启动试验台可方便地完成ABS ECU 控制功能的测试。
通过故障设定装置设置不同故障,可测试ECU 故障诊断功能。
上位机根据所选择的测试工况通过运动控制卡发出控制指令,驱动伺服电动机带动齿圈转动,以再现事先设定的不同工况下的轮速曲线;轮速传感图1 试验台工作原理图Fig.1 Principle of the test bench器将轮齿信号送入待测ECU ,ECU 根据轮速信号发出控制指令,驱动电磁阀工作,调节制动轮缸内的制动压力,模拟ABS 控制过程的压力变化;轮速信号和制动轮缸压力信号由数据采集卡采集并输出至上位机显示和保存,记录的ABS 系统工作过程还可进一步分析。
2 试验台结构设计211 轮速再现装置21111 轮速再现装置硬件ABS 台架试验一般都是通过轮速模拟装置来生成控制器工作所需的轮速信号,如变频器+电动机、单片机模拟等。
因ABS 齿圈轮齿加工误差、传感器间隙不均匀等,实车状态下的轮速信号具有波动性,而且会混入各种干扰信号。
为了考核ABS ECU 性能,台架应能提供尽可能真实的轮速信号。
本文采用“能提供高频响应特性和起停特性的伺服电动机+运动控制卡+实车齿圈”的方案来再现轮速信号[3]。
图2所示为轮速再现装置工作原理图,上位机将在实车试验测得的真实轮速曲线数据通过专用软件编程输出给电动机控制器,驱动电动机带动齿圈转动,经轮速传感器采集得到控制所需轮速信号。
图2 轮速再现装置工作原理图Fig.2 Principle of the reoccurrence equipment ofwheel speed signals台架上需要再现的轮速信号来源于各种典型附着系数路面(如高附着、低附着、对接和对开)和工况(如高速、低速和转弯制动等)下的ABS 实车道路试验,车辆的纵向和横向载荷转移等因素对制动过程的影响已经体现在轮速信息中。
因此,采用伺服电动机再现采集到的各轮速作为ABS 台架测试的依据符合实际的制动工况。
轮速再现装置中伺服电动机的选型需要依据道路试验所得到的轮速曲线和数据进行分析计算。
轮速变化最快的工况出现在低附着路面的轮速下降阶段。
当附着系数约为012时,测得的最大轮速降约为0112s 内下降3418km/h 。
试验车轮胎半径r t 为01255m ,由此计算试验车车轮角减速度为ε1=ΔvΔt r t=31519rad/s 2(1)ABS ECU 的控制依据是一定时间内轮速传感器采集得到的轮齿脉冲数,为满足ABS ECU 的检测需要,应保证在相同时间内轮速再现装置产生的轮齿脉冲数与实车试验时轮速传感器产生的轮齿脉冲数一致。
试验车轮速传感器轮速再现装置的齿圈齿数分别为z 1=40、z 2=47,若要满足单位时间内轮齿脉冲数一致的要求,则轮速再现装置齿圈的角加速度应为ε2=ε1z 1z 2=31519×4047=26819rad/s 2(2)轮速试验曲线的再现要求电动机频繁地加/减速、起/停,即对动态响应性能要求较高。
通过计算得到轮速再现装置齿圈的转动惯量J 1=1102×10-4kg ・m 2,而齿圈连接附件和电动机自身转动惯量之和J 2=1181×10-4kg ・m 2,因此所需电动机总加速扭矩至少应为T =(J 1+J 2)ε2=0107609N ・m (3)为了适应更低的路面附着系数试验要求,电动机加速扭矩应留有一定余量。
本试验台选用日本松下公司的MHMD082P1U 型交流伺服电动机,功率为0175kW ,额定输出扭矩为214N ・m ,最大输出扭矩为711N ・m ,额定输出转速为3000r/min ,伺服更新率为4kHz ,即最快响应时间为250μs ,足以满足ABS 轮速再现装置的要求。
21112 轮速再现装置控制软件根据实车试验采集到的轮速数据,选取不同路面和车速下典型的ABS 制动过程中的轮速数据,从中提取能够反映车轮运动状况的时刻2轮速特征点建立特征点库。
再利用工况模拟人机界面通过对时刻2轮速特征点的积分得到并保存时刻2位移值,积分公式为S t =v 0t +12at 2=12t (v t +v 0)(4)式中 v 0、v t ———车轮的初、末切向线速度83农 业 机 械 学 报 2009年S t ———车轮的切向位移t ———轮速从v 0变化到v t 的时间将人机界面生成的轮速曲线数据时刻2位移值导入与数字运动控制器(PCI208卡)配套的操作软件CAM G eneral 的Point Table 表中[4],生成速度2时刻和位移2时刻曲线,并得到用于电动机控制的Table Points 表值。
再通过电动机控制操作界面Motion Perfect2,运用Trio Basic 语言编程实现对ABS 台架测试系统电动机的控制,驱动电动机带动齿圈运动,经轮速传感器实测即可再现轮速信号。
21113 轮速再现结果图3所示为某一个通道轮速曲线再现结果,其中实线为根据试验车辆在低附着路面上ABS 试验结果设定的轮速试验曲线,虚线为本试验台轮速再现的轮速曲线。
对比可以看出,由轮速再现装置生成的轮速曲线与设定的路试轮速曲线形状吻合,可以真实再现出道路试验的轮速特征点。
所以再现的轮速信号完全满足ABS ECU 台架测试的需要。
图3 轮速曲线对比图Fig.3 Contrast of the wheel s peed curves212 数据采集系统21211 系统结构数据采集系统主要包括轮速传感器、压力传感器、数据采集卡和数据采集软件,如图4所示。
图4 数据采集系统结构示意图Fig.4 Principle of the data collection system21212 系统软件程序主要采集4路轮速信号和4路轮缸压力信号。
设定的数据采样周期为5ms ,采集的数据由串口发送至上位机。
213 测控系统测控系统采用VB 语言设计的用户操作界面如图5[5~6]所示,上位机按照一定通讯协议接收下位机发送的数据,进行处理、显示和保存,同时对轮速再现装置和压力源进行控制。
图5 汽车ABS ECU 性能测试操作界面Fig.5 Interface of the performance testing onthe vehicle ABS ECU214 基础制动系统及制动压力源21411 基础制动系统选用实车的制动主缸、制动轮缸、制动盘、制动管路等基础制动系统部件。
21412 制动恒压油源为了模拟紧急制动过程中驾驶员对制动踏板的操纵,设计了如图6所示的恒压油源系统,由液压系统控制器控制活塞顶杆移动,活塞顶杆直接作用于制动主缸。
图6 恒压油源原理图Fig.6 Principle of the constant 2pressure hydraulic power1.油箱2.带旁通阀的过滤器3.电磁溢流阀4.柱塞泵5.泵电动机6.液位计7.截止阀8.压力表9.三位四通电磁换向阀 10.液压单向阀 11.蓄能器 12.单活塞杆油缸当系统需要初始制动压力时,液压系统控制器驱动三位四通电磁换向阀工作在直线导通方式,此时前进增压通道导通,液压油被液压泵从油箱泵入前进通道,经液压单向阀流入单活塞杆油缸左侧,活塞杆向外移动,作用于制动主缸,制动系统管路内的压力增大;当回路压力超过设定的压力时,液压油经电磁溢流阀流回油箱,构成油压回路,回路压力不再增大,由蓄能器实现压力的保持。