第九章系统的状态变量分析汇总
- 格式:ppt
- 大小:1.95 MB
- 文档页数:15

Chap.9 系统的状态变量分析1.系统状态及状态方程的基本概念2. 信号流图signal flow graph信号流图的代数运算1. 只有一个输入支路的结点值等于输入信号乘以支路增益。
3. 并联支路的合并:并联支路的总增益等于所有各支路增益之和(并联相加)。
2. 串联支路的合并:串联支路的总增益等于所有各支路增益的乘积(串联相乘)。
x 3信号流图的代数运算(续)4.结点的吸收和变换:输出结点可以消掉,混合结点也可以通过增加一个具有单位传输的支路变为输出结点。
5. 环路吸收:带有环路系统的总增益等于断开环路后所有输入输出支路增益乘积除以因式(1-环路增益)。
信号流图简化步骤环路吸收,去掉结点1X 例2结点吸收环路吸收信号流图简化步骤(续)环路吸收,去掉结点闭环4X 结点吸收,去掉结点4X信号流图简化步骤(续)442233221432443322432133222244444321332243211)1)(1(1)1)(1(G H G H G H G H G H H H G H G H G H H H H H H G H G G H H G H G H H H G H G H G H H H H H ++++++=++−−−−++=得到系统函数并联相加环路吸收)()(14422332214324433224321G H G H G H G H G H H H G H G H G H H H H H H ++++++=对于例2, 用梅森公式求系统的转移函数。
求信号流图的特征行列式△△=1+(H 2G 2+ H 3G 3+ H 4G 4+H 2H 3H 4G 1)+(H 2G 2H 3G 3+ H 2G 2H 4G 4)系统具有4个环路,分别为:L1=(X 1→X 2→X 1)=-H 2G 2L2= (X 3→X 4→X 3)=-H 3G 3L3= (X 4→Y →X 4)=-H 4G 4L4= (X 1→X 2→X 3→X 4→Y →X 1)=-H 2H 3H 4G 1互不接触环路为:L1和L2, L1和L3前向通路只有一条:g1=H 1H 2H 3H 4,其特征行列式的余子式△1为△1=1 –0 + 0 -……22)()0t e b)(t e i βp 1i α−1)(t r i p α+321===λλλ&&&321⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡λλλ&&&。
第九章 线性系统的状态空间分析与综合在第一章至第七章中,我们曾详细讲解了经典线性系统理论以及用其设计控制系统的方法。
可以看到,经典线性理论的数学基础是拉普拉斯变换和z 变换,系统的基本数学模型是线性定常高阶微分方程、线性常系数差分方程、传递函数和脉冲传递函数,主要的分析和综合方法是时域法、根轨迹法和频域法,分析的主要内容是系统运动的稳定性。
经典线性系统理论对于单输入-单输出线性定常系统的分析和综合是比较有效的,但其显著的缺点是只能揭示输入-输出间的外部特性,难以揭示系统内部的结构特性,也难以有效处理多输入-多输出系统。
在50年代蓬勃兴起的航天技术的推动下,在1960年前后开始了从经典控制理论到现代控制理论的过渡,其中一个重要标志就是卡尔曼系统地将状态空间概念引入到控制理论中来。
现代控制理论正是在引入状态和状态空间概念的基础上发展起来的。
在现代控制理论的发展中,线性系统理论首先得到研究和发展,已形成较为完整成熟的理论。
现代控制理论中的许多分支,如最优控制、最优估计与滤波、系统辨识、随机控制、自适应控制等,均以线性系统理论为基础;非线性系统理论、大系统理论等,也都不同程度地受到了线性系统理论的概念、方法和结果的影响和推动。
现代控制理论中的线性系统理论运用状态空间法描述输入-状态-输出诸变量间的因果关系,不但反映了系统的输入—输出外部特性,而且揭示了系统内部的结构特性,是一种既适用于单输入--单输出系统又适用于多输入—多输出系统,既可用于线性定常系统又可用于线性时变系统的有效分析和综合方法。
在线性系统理论中,根据所采用的数学工具及系统描述方法的不同,又出现了一些平行的分支,目前主要有线性系统的状态空间法、线性系统的几何理论、线性系统的代数理论、线性系统的多变量频域方法等。
由于状态空间法是线性系统理论中最重要和影响最广的分支,加之受篇幅限制,所以本章只介绍线性系统的状态空间法。
9-1 线性系统的状态空间描述1. 系统数学描述的两种基本类型这里所谓的系统是指由一些相互制约的部分构成的整体,它可能是一个由反馈闭合的整体,也可能是某一控制装置或受控对象。
![[工学]系统的状态变量分析法](https://uimg.taocdn.com/c9620f475acfa1c7aa00cc60.webp)
第九章系统的状态变量分析1、内容简介在系统的状态变量分析中,介绍了状态和状态变量的基本概念,由电路原理图建立状态方程的方法,由微分方程建立状态方程的方法,由系统模拟框图建立状态方程的方法,状态方程的时域和变换域求解,状态矢量的线性变换,系统的可控制性和可观测性的基本概念,离散系统的状态方程的建立和求解。
最后介绍了用MATLAB求解系统的状态方程。
2、学习目标1、理解系统的状态与状态空间的概念。
2、掌握连续系统由电路、微分方程、系统模拟框图和系统函数建立状态方程。
3、掌握离散系统由差分方程、系统模拟框图和系统函数建立状态方程。
4、了解状态方程求解的基本方法,能够用MATLAB求解系统的状态方程。
3、重点难点1.系统状态和状态空间的概念。
2.如何建立系统的状态方程。
4、应用利用MATLAB求解系统状态方程。
5、教案内容(1) 系统的状态变量的概念状态变量系统在时刻0t 的状态是指一组数10()x t ,20()x t ,…, 0()n x t ,不仅要求这组数的个数是最少的,而且还可由10()x t ,20()x t ,…, 0()n x t 和0t t >时系统的输入得出0t t >时所有的状态或输出。
这组变量10()x t ,20()x t ,…, 0()n x t 称为系统的状态变量。
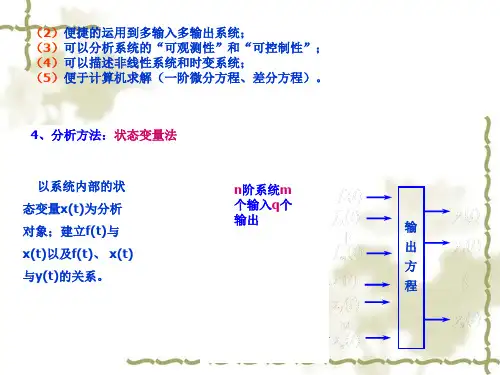
状态空间分析法状态空间分析法不仅适用与单输入单输出系统,而且适用于多输入多输出系统的分析,它可以描述系统的外部特性,也可以描述系统的内部特性,而且能够推广到时变系统和非线性系统。
(2)系统状态方程的一般形式m 个输入p 个输出的N 阶连续时间系统的状态方程为N 个一阶微分方程组,可以用矩阵形式表示为即离散时间系统的状态方程具有与连续系统状态方程相似的形式,对于一个有m 个输入p 个输出的N 阶离散时间系统可以用N 个一阶差分方程描述,其状态方程和输出方程的一般形式为其中A ,B ,C ,D 为状态方程和输出方程的系数矩阵。