第六章系统的状态变量分析
- 格式:ppt
- 大小:384.00 KB
- 文档页数:27

Chap.9 系统的状态变量分析1.系统状态及状态方程的基本概念2. 信号流图signal flow graph信号流图的代数运算1. 只有一个输入支路的结点值等于输入信号乘以支路增益。
3. 并联支路的合并:并联支路的总增益等于所有各支路增益之和(并联相加)。
2. 串联支路的合并:串联支路的总增益等于所有各支路增益的乘积(串联相乘)。
x 3信号流图的代数运算(续)4.结点的吸收和变换:输出结点可以消掉,混合结点也可以通过增加一个具有单位传输的支路变为输出结点。
5. 环路吸收:带有环路系统的总增益等于断开环路后所有输入输出支路增益乘积除以因式(1-环路增益)。
信号流图简化步骤环路吸收,去掉结点1X 例2结点吸收环路吸收信号流图简化步骤(续)环路吸收,去掉结点闭环4X 结点吸收,去掉结点4X信号流图简化步骤(续)442233221432443322432133222244444321332243211)1)(1(1)1)(1(G H G H G H G H G H H H G H G H G H H H H H H G H G G H H G H G H H H G H G H G H H H H H ++++++=++−−−−++=得到系统函数并联相加环路吸收)()(14422332214324433224321G H G H G H G H G H H H G H G H G H H H H H H ++++++=对于例2, 用梅森公式求系统的转移函数。
求信号流图的特征行列式△△=1+(H 2G 2+ H 3G 3+ H 4G 4+H 2H 3H 4G 1)+(H 2G 2H 3G 3+ H 2G 2H 4G 4)系统具有4个环路,分别为:L1=(X 1→X 2→X 1)=-H 2G 2L2= (X 3→X 4→X 3)=-H 3G 3L3= (X 4→Y →X 4)=-H 4G 4L4= (X 1→X 2→X 3→X 4→Y →X 1)=-H 2H 3H 4G 1互不接触环路为:L1和L2, L1和L3前向通路只有一条:g1=H 1H 2H 3H 4,其特征行列式的余子式△1为△1=1 –0 + 0 -……22)()0t e b)(t e i βp 1i α−1)(t r i p α+321===λλλ&&&321⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡λλλ&&&。

实验六 系统的状态变量分析王靖08通信 12号实验目的(1)掌握MA TLAB 在系统状态变量分析中的应用。
(2)掌握利用MA TLAB 求解系统的状态方程。
实验环境安装MA TLAB7.0以上版本的计算机实验内容1. 利用help 命令了解以下命令的基本用法和意义tf2ss ,ss2tf ,lsim ,dlsim2. 微分方程到状态方程的转换描述连续LTI 系统的微分方程为:''()5'()10()'()4()y t y t y t x t x t ++=+试求该系统的状态方程。
步骤一:建立新的m 文件,保存并命名为program1.m 。
步骤二:输入以下命令,理解命令的含义。
%program1,微分方程到状态方程的转换 [,,,]2([14],[1510])A B C D tf ss =步骤三:保存程序并运行,记录得到的结果:5101;;14;0100A B C D --====步骤四:由得到的结果可以直接获得系统的状态方程和输出方程分别为:112212()()5101[][][][]()()()100()()[14][]()qt q t x t q t q t x t y t x t --=+= : 思考:如何使用ss2tf 命令从状态方程获得系统函数矩阵H(s)?[num,den]=ss2tf(A,B,C,D,k)3. 利用MATLAB 求解离散时间状态方程离散时间系统的状态方程一般形式为[1][][][][][]q k Aq k Bx k y k C q k D x k +=+=+可用函数dlsim 获得离散状态方程的数值解,其基本调用形式为:y=dlsim(A,B,C,D,x,q0);用MA TLAB 计算以离散时间LTI 系统的输出。
其状态方程和输出方程分别为: 1122112201[1][]0[][][][][]15[1][]166[][]15[][][][][]20q k q k x k q k q k y k q k y k q k +=++--= 初始状态和输入分别为:12[0]2[][];[][][0]3q x k u k q == 步骤一:建立m 文件,保存并命名为program2.m 。

![[工学]系统的状态变量分析法](https://uimg.taocdn.com/c9620f475acfa1c7aa00cc60.webp)
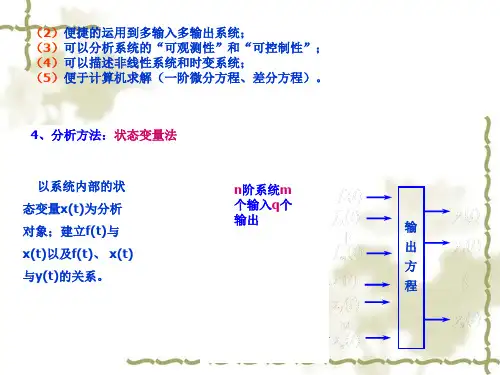
状态变量分析法的优点:1. 便于观察系统内部某些物理量的变化过程;2. 与系统的复杂程度无关,复杂系统和简单系统的数学模型相似,适于多输入多输出系统;3. 适于研究非线性或时变系统。
因为一阶微分方程或差分方程是研究非线性和时变系统的有效方法。
4. 便于研究系统的稳定性、可控性、可观测性及系统内部参数变化对系统特性的影响;5. 状态方程都是一阶微分方程或差分方程,便于采用数值解法在计算机上实现系统分析。
系数矩阵由系统的参数决定,非时变系统为常数,时变系统为时间的函数。
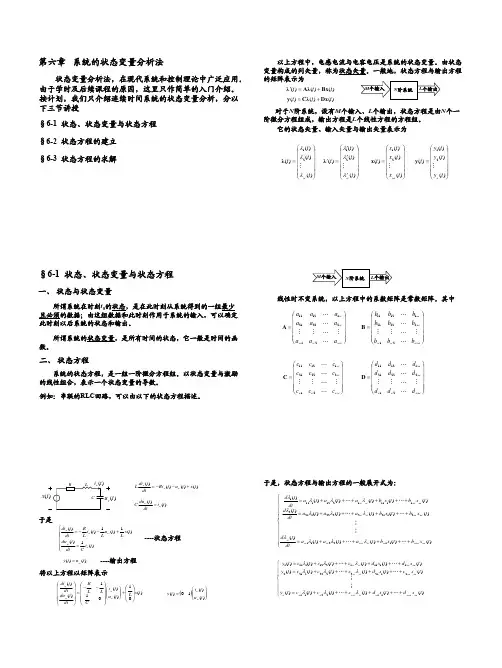
,A B 四、输出方程(output equation))(,),(),(21t y t y t y r Λ输出方程是由状态变量和激励信号的线性方程,因此对线性系统而言,输出方程是一组线性方程。
例如,假设系统有个输出,r mrm r r n rn r r r mm n n mm n n e d e d e d x c x c x c t y e d e d e d x c x c x c t y e d e d e d x c x c x c t y +++++++=+++++++=+++++++=ΛΛMΛΛΛΛ22112211222212122221212121211112121111)()()(则,A B矩阵形式为:)(10081910120010321'3'2'1t e x x x x x x ⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01000112198⎡⎤⎢⎥∴=⎢⎥⎢⎥---⎣⎦A 依此方法选择的状态变量常称为相变量状态变量,状态方程叫相变量状态方程。
状态方程和输出方程中的系数矩阵与输入输出方程有关。
[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3210410)(x x x t y 001⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦B []1040=C 0=D矩阵形式为:1211012110''13'22'1)()(+--+++=+----====m m n n n nn x b x b x b t y t e x a x a x a x x xx x x x ΛΛM )(1000100010211210''2'1t e x x x a a a a x x x n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-M M ΛM ΛΛM[]001111n n n n n nb b a b b a b b a b --∴=---=C D L 当时,矩阵不再为0。