第6章 图形变换02—透视变换
- 格式:ppt
- 大小:501.50 KB
- 文档页数:37
四下数学图形变换知识点数学中的图形变换是研究图形在平面或者空间中进行移动、旋转、翻转等操作的数学分支。
图形变换在几何学中有着广泛的应用,对于理解和解决几何问题有着重要的意义。
本文将重点介绍四下数学中的图形变换知识点,包括平移、旋转、翻转和对称等。
1.平移变换平移是指将图形在平面或者空间中沿着指定的方向和距离移动的操作。
平移变换不改变图形的形状和大小,只改变图形的位置。
在平面坐标系中进行平移变换时,可以通过平移向量来描述平移的方向和距离。
平移变换的数学表示为:T(P) = P’ = P + v其中,P是原始图形上的点,P’是平移后的点,v是平移向量。
平移向量的坐标表示为(vx, vy)。
2.旋转变换旋转是指将图形按照指定的旋转中心和旋转角度进行旋转的操作。
旋转变换会改变图形的位置、形状和方向。
在平面坐标系中进行旋转变换时,旋转中心可以是坐标原点或者其他点。
旋转变换的数学表示为:R(P) = P’ = (x’, y’) = (x * cosθ - y * sinθ, x * sinθ + y * cosθ)其中,P是原始图形上的点,P’是旋转后的点,θ是旋转角度。
3.翻转变换翻转是指将图形按照指定的翻转线进行翻转的操作。
翻转变换会改变图形的位置、形状和方向。
在平面坐标系中进行翻转变换时,翻转线可以是x轴、y轴或者其他直线。
翻转变换的数学表示为:F(P) = P’ = (x’, y’) = (x, -y) (以x轴翻转)F(P) = P’ = (x’, y’) = (-x, y) (以y轴翻转)其中,P是原始图形上的点,P’是翻转后的点。
4.对称变换对称是指将图形按照指定的对称中心或者对称轴进行对称的操作。
对称变换会改变图形的位置、形状和方向。
在平面坐标系中进行对称变换时,对称中心可以是坐标原点或者其他点,对称轴可以是x轴、y轴或者其他直线。
对称变换的数学表示为:S(P) = P’ = (x’, y’) = (2 * a - x, y) (以点(a, 0)为对称中心对x轴对称)S(P) = P’ = (x’, y’) = (x, 2 * b - y) (以点(0, b)为对称中心对y轴对称)其中,P是原始图形上的点,P’是对称后的点。

常见图形的变换及用途:教案详解图像变换方法与应用图形变换,是指将一个图形进行身形、大小、位置和姿态的改变,从而得到一个新的图形的过程,是图像处理中的重要内容。
图形变换不仅可以使得图像更加丰富和多样化,还可以在很多领域得到广泛的应用,如游戏、电影、多媒体、医疗等领域,今天我们就来详细的学习一下常见图形的变换及用途,希望对你有所帮助。
一、图形变换的基础知识1、图形变换的基本类型:主要包括刚性变换、相似变换、仿射变换、投影变换等。
2、图形变换的重要影响因素:主要包括变换矩阵、变换前后的坐标系、变换前后的图像大小等。
3、图形变换的基本理论:主要包括平移、缩放、旋转、翻转、拉伸、扭曲等几个关键技术。
二、常见图形变换及用途1、平移变换平移变换是将图像在正交平面内沿着x、y轴方向进行移动的一种基本变换,用于调整图像的位置。
通常使用平移矩阵来进行平移变换,矩阵内容为:[[1, 0, dx], [0, 1, dy], [0, 0, 1]],其中dx、dy分别表示在x、y轴方向上的平移距离。
应用场景:在许多图像处理算法中,都需要将图像进行平移变换,比如说模板匹配、人脸检测等。
2、缩放变换缩放变换是将图像在x轴和y轴方向上均匀拉伸或收缩的一种基本变换。
通常使用缩放矩阵来进行缩放变换,矩阵内容为:[[a, 0, 0], [0, b, 0], [0, 0, 1]],其中a、b表示在x、y轴各自方向上的缩放比例。
应用场景:在许多图像处理算法中,都需要将图像进行缩放变换,比如图像放大、縮小、模式识别、图像超分辨率重建等。
3、旋转变换旋转变换是将图像沿着某一点进行旋转的一种基本变换。
通常使用旋转矩阵来进行旋转变换,矩阵内容为:[[cosθ, -sinθ, 0], [sinθ, cosθ, 0], [0, 0, 1]],其中θ表示旋转的角度。
应用场景:旋转变换在图像矫正、图像特征提取以及计算机视觉领域中得到广泛的应用。
4、翻转变换翻转变换是将图像进行水平或垂直方向翻转的一种基本变换。


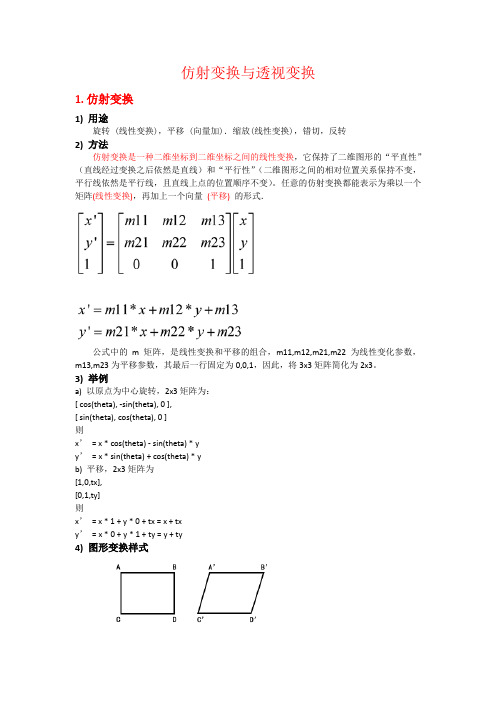
仿射变换与透视变换1. 仿射变换1) 用途旋转 (线性变换),平移 (向量加).缩放(线性变换),错切,反转2) 方法仿射变换是一种二维坐标到二维坐标之间的线性变换,它保持了二维图形的“平直性”(直线经过变换之后依然是直线)和“平行性”(二维图形之间的相对位置关系保持不变,平行线依然是平行线,且直线上点的位置顺序不变)。
任意的仿射变换都能表示为乘以一个矩阵(线性变换),再加上一个向量(平移)的形式.公式中的m矩阵,是线性变换和平移的组合,m11,m12,m21,m22为线性变化参数,m13,m23为平移参数,其最后一行固定为0,0,1,因此,将3x3矩阵简化为2x3。
3) 举例a) 以原点为中心旋转,2x3矩阵为:[ cos(theta), -sin(theta), 0 ],[ sin(theta), cos(theta), 0 ]则x’= x * cos(theta) - sin(theta) * yy’= x * sin(theta) + cos(theta) * yb) 平移,2x3矩阵为[1,0,tx],[0,1,ty]则x’= x * 1 + y * 0 + tx = x + txy’= x * 0 + y * 1 + ty = y + ty4) 图形变换样式2. 透视变换(投影变换)1) 用途将2D矩阵图像变换成3D的空间显示效果,全景拼接.2) 方法透视变换是将图片投影到一个新的视平面,也称作投影映射.它是二维到三维再到另一个二维空间的映射。
相对于仿射变换,它提供了更大的灵活性,将一个四边形区域映射到另一个四边形区域(不一定是平行四边形).它不止是线性变换.但也是通过矩阵乘法实现的,使用的是一个3x3的矩阵,矩阵的前两行与仿射矩阵相同(m11,m12,m13,m21,m22,m23),也实现了线性变换和平移,第三行用于实现透视变换。
以上公式设变换之前的点是z值为1的点,它三维平面上的值是x,y,1,在二维平面上的投影是x,y,通过矩阵变换成三维中的点X,Y,Z,再通过除以三维中Z轴的值,转换成二维中的点。

图形的变换归纳总结图形变换是数学中的一个重要概念,它涉及到图形在平面内的平移、旋转、镜像和缩放等操作。
通过对图形变换的归纳总结,我们能够更好地理解其规律和性质,并应用于解决实际问题。
本文将从平移、旋转、镜像和缩放四个方面来归纳总结图形变换的相关知识。
一、图形平移图形平移是指在平面内保持大小和形状不变的情况下,将图形沿平行向量平移一定距离。
平移变换的特点是新旧图形相似,仅位置发生改变。
平移变换常用符号表示为T(x, y) = (x + a, y + b),其中T表示平移操作,(x, y)表示原始图形的坐标,而(a, b)表示平移向量的坐标。
通过平移变换,我们可以得到同一图形在不同位置的变化。
二、图形旋转图形旋转是指将图形按照某一中心点旋转一定角度,使其形状和大小保持不变。
旋转变换的特点是新旧图形相似,仅方向发生改变。
旋转变换常用符号表示为R(θ),其中R表示旋转操作,θ表示旋转的角度。
旋转角度可正可负,表示顺时针或逆时针方向的旋转。
通过旋转变换,我们可以得到同一图形在不同方向的变化。
三、图形镜像图形镜像是指将图形沿一条直线作对称操作,使其形状和大小保持不变。
镜像变换的特点是新旧图形相似,仅位置关系发生改变。
镜像变换常用符号表示为M(x, y),其中M表示镜像操作,(x, y)表示原始图形的坐标。
镜像操作可以分为水平镜像和垂直镜像两种情况。
通过镜像变换,我们可以得到同一图形在不同位置关系下的变化。
四、图形缩放图形缩放是指按照一定的比例改变图形的大小,使其形状保持不变。
缩放变换的特点是新旧图形相似,仅大小发生改变。
缩放变换常用符号表示为S(k),其中S表示缩放操作,k表示缩放的比例因子。
比例因子k可以大于1表示放大操作,也可以小于1表示缩小操作。
通过缩放变换,我们可以得到同一图形在不同大小比例下的变化。
通过对图形变换的归纳总结,我们可以发现以下规律:1. 平移、旋转和缩放操作都可以通过坐标变换实现,其中平移操作相对简单,仅需改变图形的坐标即可;旋转和缩放操作则需要通过旋转矩阵和缩放矩阵进行计算。
计算机图形学中的透视变换算法研究计算机图形学是一门应用广泛且发展迅速的学科,其中透视变换算法是其中的重要内容之一。
透视变换算法是用于将三维场景投影到二维平面上的一种技术,可以用于制作三维建模、游戏开发、虚拟现实等诸多场景。
本文将对透视变换算法进行深入探讨。
一、透视变换的基本原理透视变换是一种投影变换,实际上是将原本三维的场景投影到一个二维平面上,使得相机所看到的场景保持透视关系。
我们以一个简单的场景为例,来说明透视变换的基本原理。
图一:一个简单的场景如图一所示,我们需要将这个三维场景投影到一个平面上。
我们假设相机位置在(0,0,0),相机朝向为Z轴正方向。
首先,我们需要将相机坐标系转换为世界坐标系。
我们可以通过相机的位置、视线方向、以及上方向来得到相机坐标系的X、Y、Z轴方向向量,进而得到相机矩阵(Camera Matrix)。
接下来,我们需要将物体坐标系转换为相机坐标系。
我们可以通过将物体的顶点坐标乘以一个变换矩阵(Model Matrix),将物体从模型空间转换到世界空间,然后将其乘以相机矩阵,将其从世界空间转换到相机空间。
最后,我们对相机空间中的坐标进行透视变换,得到最终的图像。
透视变换的过程如下:(1) 将相机空间中的坐标投影到相机平面上。
这一步称作投影变换(Projection transformation),通常使用投影矩阵(Projection Matrix)来实现。
(2) 对投影后的坐标进行归一化(Normalization)处理,使得所有坐标的Z值都等于1。
(3) 将归一化后的坐标变换到屏幕空间(Screen Space)。
屏幕空间是二维的,并且以屏幕左上角为原点,以屏幕右下角为坐标系的正方向。
这一步通常使用视口变换(Viewport Transformation)来实现。
二、透视变换算法的具体实现透视变换算法是计算机图形学中的重要内容之一,其核心在于将三维场景转换为二维图像。