大众POLO车载网络系统的原理与检修
- 格式:pdf
- 大小:619.10 KB
- 文档页数:4
第二节上海波罗(POLO)轿车CAN数据总线与车载网络系统第二节上海波罗(POLO)轿车CAN数据总线与车载网络系统2002款波罗的电气系统的设计和结构都是全新的。
它用CAN数据总线将各个控制单元连接起来,形成车载网络系统。
各个控制单元在车上的位置如图1所示。
车载网络系统重要的附属装置如图2所示1、车载网络系统控制单元(图3)在车载网络系统中起重要作用。
它承担以前一直由单独继电器和控制单元所执行的功能。
车载网络系统控制单元具有下列功能:(1)负荷原理在行驶中大量舒适性钻杆被和电热器(如座椅加热装置、后窗加热装置、外后视镜加热和电子辅助加热装置)会引起发电机过载,进而导致蓄电池放电,电路如图4所示。
这尤其出现在距离极短的短途行车和冬季行驶时,以及时停时走和装备过多的车辆中。
图4负荷原理相关电路A —蓄电池;C —发电机;J —发动机控制单元;J131 —可加热式驾驶员座椅控制单元;J132 —可加热式前座乘客座椅控制单元;J255 —空调电子控制系统控制单元;J301 —空调器控制单元;J519 —车载网络系统控制单元;J533 —数据总线诊断借口;Z1 —可加热式后窗;Z4 —可加热式外后视镜,驾驶员侧;Z5 —可加热式外后视镜,前座乘客侧;Z6 —可加热式驾驶员座椅;Z7 —可加热式驾驶员靠背;Z8 —可加热式前座乘客座椅。
Z9 —可加热式前座乘客靠背考虑到短时间用电器的电流需求,车载网络系统控制单元的负荷管理系统定期监控蓄电池,网络系统控制单元将来采取措施,以保持行驶能力并确保车辆重新起动能力。
具体措施如图5。
(2)车内灯控制车内灯控制的电路图如图6所示。
如果前部和后部车内灯开关都位于车门触点位置,如图7、图8所示。
通过车载网络系统控制单元J519可以确保在车辆停止而车门未关闭状态下,车内灯10min后自动关闭,这样可以避免蓄电池不必要的放电。
如果解除车辆联锁或打开点火开关后车内灯立即关闭,车内灯在撞车时自动接通。
上海波罗(POLO)轿车CAN数据总线与车载网络系统(1)随着人们对汽车的安全性、舒适性、尾气排放及燃油经济性的要求越来越苛刻,这使得控制单元之间的信息交换越来越密集,传感器和导线的数量迅速增加,无形中加大了排除故障和维修的难度。
为此,必须找到一种设计优良的解决方案来使车内电子系统在不占用太大空间的情况下仍然保持其可操作性,CAN数据总线这时应运而生。
它是德国博世公司专门为大众和奥迪车系设计的,国内像奥迪A6、帕萨特B5、波罗、宝来都采用CAN数据总线,CAN是CONTROLLER AREA NETWORK(控制单元区域网络)的缩写,这就意味着将各个控制单元之间网络化并可进行数据交流。
这又是计算机网络系统在现代汽车上的应用,利用CAN数据总线将各个控制单元连接起来,形成了车载网络系统。
一、CAN数据总线CAN数据总线是一种各控制单元间的数据传输形式,它将各个控制单元形成一个整体,所有信息都沿两条线路传输,与所参与的控制单元数及所涉及的信息量的大小无关,这样就解决了随着新增信息量的加大,线路及控制单元上的插头的数目也增加的问题,并且每条信息需要不同线路的问题也得以解决。
故国产新车宝来、波罗都应用了CAN数据总线系统,具体表现出如下优点:(1)如果数据扩展以增加新的信息,只需升级软件即可。
(2)控制单元对所传输的信息进行实时监测,监测到故障后存储故障码。
(3)使用小型控制单元及小型控制单元插孔可节省空间。
(4)使传感器信号线减至最少,控制单元间可做到高速数据传输。
(5)CAN数据总线符合国家标准,因此可应用不同型号控制单元间的数据传输。
1然而,CAN数据总线为什么具有如此功能呢?让我们了解一下CAN数据总线的组成、结构和数据传输原理。
(一)C AN数据总线的组成与结构CAN数据总线由一个控制器,一个收发器,两个数据传输终端以及两条数据传输线组成。
除了数据传输线,其他元件都置于控制单元内部。
控制单元功能不变,如图1所示。
基于大众POLO轿车基础上CAN—BUS系统故障诊断与检修作者:王彬彬来源:《山东工业技术》2016年第04期摘要:随着社会经济的发展,汽车成为人们日常生活中重要的代步工具,在POLO轿车上使用的车载网络系统,主要以CAN网络和LIN网络为主。
大众POLO轿车的CAN网络系统又分为高速CAN和低速CAN两个网络系统,其主要应用于驱动系统和舒适系统中。
本文对大众POLO轿车基础上CAN-BUS系统故障诊断与检修的研究,着重分析了POLO轿车的CAN-BUS系统,并对故障诊断与检修方式做出了相关阐述。
关键词:大众POLO轿车;CAN-BUS系统;故障诊断;故障检修DOI:10.16640/ki.37-1222/t.2016.04.2270 前言汽车控制单元ECU在应用和发展过程中,其智能化程度越来越高,对汽车整体性能影响越来越大。
汽车ECU发展过程中,可靠性以及空间布局更加趋向于合理化的发展趋势,并与车载网络紧密结合,逐渐形成CAN-BUS系统,传输速率不断提升。
但在CAN-BUS发展过程中,由于CAN-BUS自身的特点以及车载网络等因素影响,如何对CAN-BUS系统故障进行处理,保证系统运行的稳定性,成为汽车行业发展过程中必须面临的一个重要问题。
本文分析了CAN-BUS系统的特点,并就系统故障诊断与检修工作提出了笔者自己的观点和建议。
1 CAN-BUS系统特点CAN-BUS是国家标准化组织的串行通信协议,其灵活性、可靠性以及实时性较好,能够更好地应用于实际工作当中。
一般来说,CAN总线有着以下特点:第一,采取多主机的方式工作,当其中一台主机出现系统故障时,系统依旧能够维持运行,采用数据块编码,具有较好的稳定性;第二,能够更好地对总线冲突问题进行解决,保证系统运行的可靠性;第三,针对于数据传输过程中的数据错误问题,可以进行有效的校验;第四,短帧数据传输模式,传输时间短,并且具有较强的抗干扰能力;第五,但电控单元出现错误时,系统可以自行切断与总线之间的联系,避免电控单元故障对总线产生较大影响;第六,数据通信实现方式多元化,既可以点对点的进行数据通信,又可以点对面的进行数据通信[1]。
车载网络系统原理与检修一、车载网络系统的原理1. 总线网络:车载网络系统采用了总线网络的结构,主要包括CAN 总线、LIN总线以及FlexRay总线。
这些总线网络按照不同的要求实现车内所有设备之间的信息传递和通信。
2.数据传输:车载网络系统通过总线网络将各个子系统连接起来,实现数据的传输和通信。
比如,通过CAN总线可以实现车辆各个子系统之间的信息传递,包括发动机、ABS系统、气囊系统等。
通过LIN总线可以实现车门控制、车窗控制等功能。
3.控制单元:车载网络系统中需要有相应的控制单元来管理和控制各个子系统。
控制单元通常采用微控制器或嵌入式处理器,负责进行数据处理、通信协议的解析和控制信号的生成。
4.嵌入式系统:车载网络系统中的软件部分通常是以嵌入式系统的形式存在,这意味着它具有实时性、可靠性和可扩展性。
软件主要包括操作系统、驱动程序和应用程序。
操作系统负责管理和调度硬件资源,驱动程序负责与硬件设备的通信,应用程序则提供了各种功能和服务。
二、车载网络系统的检修1. 硬件检修:硬件检修主要针对车载网络系统中的硬件设备进行检查和维修。
首先需要检查总线网络的连接是否正常,包括CAN总线、LIN 总线和FlexRay总线的连接和接口是否正常。
其次需要检查各个子系统的连接、设备状态和供电是否正常。
最后还需要检查控制单元和嵌入式系统的工作状态,包括CPU、内存和存储设备等。
2.软件检修:软件检修主要针对车载网络系统中的软件部分进行检查和维修。
首先需要检查操作系统是否正常运行,包括启动是否正常、资源管理是否正常等。
其次需要检查驱动程序是否正常工作,包括与硬件设备的通信是否正常、设备驱动是否正常等。
最后需要检查应用程序的功能和服务是否正常,包括GPS导航、娱乐功能、车辆诊断等是否正常运行。
综上所述,车载网络系统是通过总线网络实现各个子系统之间的信息传递和通信的系统,其原理主要包括总线网络、数据传输、控制单元和嵌入式系统。
大众汽车车载网络常见故障检修方法浅析当CAN总线出现故障或数据传输异常时,往往会出现多种奇怪的故障现象,如仪表板显示异常、车辆无法启动、启动后无法熄灭,、车辆动力性能下降、某些电控系统功能失等。
这是因为相关数据或信息是通过CAN总线传输的,如果传输失败,那么会产生多种连带故障,甚至造成整个网络系统瘫痪。
最为常见的故障现象是仪表显示异常。
在检修过程中,首先应查看具体的故障症状,根据故障症状和网络结构图来初步分析有可能是哪些原因造成的,然后使用相关的诊断仪器进行诊断。
CAN故障通常的原因有CAN线短路、对电源短路、对地短路、相互接反等。
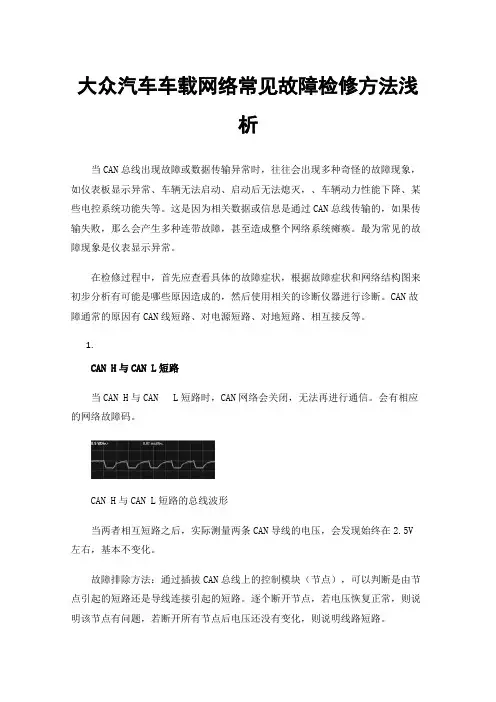
1.CAN H与CAN L短路当CAN H与CAN L短路时,CAN网络会关闭,无法再进行通信。
会有相应的网络故障码。
CAN H与CAN L短路的总线波形当两者相互短路之后,实际测量两条CAN导线的电压,会发现始终在2.5V 左右,基本不变化。
故障排除方法:通过插拔CAN总线上的控制模块(节点),可以判断是由节点引起的短路还是导线连接引起的短路。
逐个断开节点,若电压恢复正常,则说明该节点有问题,若断开所有节点后电压还没有变化,则说明线路短路。
1.CAN H对电源正极短路当出现CAN H对电源短路这种故障时,根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况或产生相关故障码。
以对12V电源短路为例,此时CAN H电压电位被置于12V,CAN L线的隐性电压被置于大约12V。
CAN H对电源短路的总线波形 CAN H对地短路的总线波形实际测量电压,若CAN H电压为12V,CAN L电压被置于约11V,则说明出现此类故障。
故障原因:如果不是CAN H导线对外部电源短路引起的,那么这种故障就有可能是控制模块内部的CAN收发器损坏造成的。
1.CAN H对电源负极(接地)短路当出现CAN H对地短路这种故障时,根据CAN总线的容错特性,可能出现整个CAN网络无法通信的情况或产生相关故障码。
2016.05
045
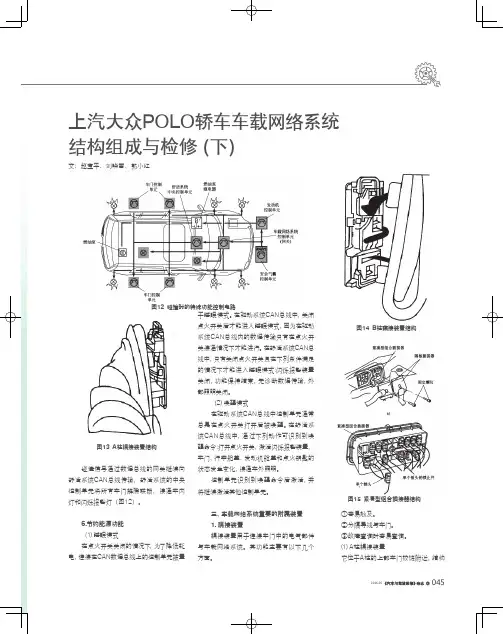
①容易触及。
②分隔导线与车门。
③故障查询时容易查询。
(1) A柱耦接装置
它位于A柱的上部车门铰链附近,结构
于睡眠模式。
在驱动系统CAN总线中,关闭点火开关后才能进人睡眠模式,因为在驱动系统CAN总线内的数据传输只有在点火开关接通情况下才能进行。
在舒适系统CAN总线中,只有关闭点火开关且在下列条件满足图12 碰撞时的特殊功能控制电路
图14 B柱藕接装置结构
图15 紧凑型组合插接器结构
图17 主熔丝支架结构
图18 电位分配器结构
图19 熔丝支架结构
图16 各个模块采用不同颜色和机械编码的插接器结构
微型熔丝
微型熔丝
1一未使用 2一Mortonic供电继电器 3一预热塞继电器 4一油泵继电器(柴油发动机) 5一登车报警灯继电器 6一前照灯清洗装置继电器 7一起动锁止继电器 8一小加热功率继电器 9一大加热功率继电器 l0—Simos控制单元供电继电器 11一X触点过载保护继电器 12一进油回路继电器 13一燃油泵继电器(汽油发动机) 14一电动辅助加热装置的熔丝支架 15一柴表1 大众车系各控制单元终端电阻规范表
图21 POLO车型具有自诊断功能的控制单元图22 线束套装修理工具V.A.G1978
VAS5051诊断仪输入。
需编码的装备包括燃油泵控制系统、线束套装修理工具V.A.G1978如图22所示。
V.A.G1978工具中附有操作说明,其中详细说明了维修时的工作步骤。
其他信息,例如部件和组件的拆卸和安装,请查询相关的维修手册。
(全文完)2016.05
047。
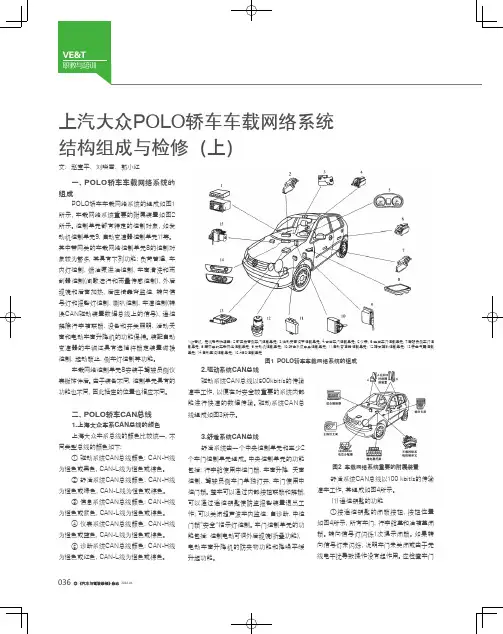
图2 车载网络系统重要的附属装置图1 POLO轿车车载网络系统的组成1.收音机、无线电导航装置;2.前座乘客侧车门控制单元;3.活动天窗调节控制单元;4.右后车门控制单元;5.仪表;6.左后车门控制单元;7.驾驶员侧车门控制单元;8.带网关的车载网络控制单元;9.发动机控制单元;10.舒适系统中央控制单元;11.自动变速器控制单元;12.转向辅助控制单元;13.安全气囊控制单元;14.自动空调控制单元;15.ABS控制单元2.驱动系统CAN总线驱动系统CAN总线以500kbit/s的传输速率工作,以便在对安全较重要的系统内部能进行快速的数据传输。
驱动系统CAN总舒适系统CAN总线以100 kbit/s的传输速率工作,其组成如图4所示。
(1) 遥控钥匙的功能①按遥控钥匙的闭锁按钮,按钮位置如图4所示,所有车门、行李舱盖和油箱盖闭锁。
转向信号灯闪烁1次提示闭锁。
如果转图3 驱动系统CAN总线组成图4 舒适系统CAN总线的组成图5 遥控钥匙图7 网关外形图后,再近距离闭锁操作。
F22一中控门锁关闭单元;J393一舒适系统的中央控制单元;J519一车载网络系统控制单元;J533一数据总线诊断接口;J560一车门报警灯继电器;M27一左侧车门登车报警灯一一一输人信号;—X—输出信号;------正极;一一接地极;一一CAN数据总线行李舱解锁按钮车门解锁按钮车门闭锁按钮络系统控制单元J519中。
网关有2个功能,图11 诊断数据转换实例提供给驱动系统CAN总线。
在网关中驱动系统CAN总线的信息被转换到舒适系统CAN总线上,空调控制单元读取这些信息并将它用于空调的调节。
图9 网关信息传输过程图10 诊断数据转换示意图。
大众POLO轿车CAN网络系统控制原理与故障诊断田宝春【摘要】阐述了车载CAN总线的特点及组成,分析了大众POLO轿车CAN网络系统的控制过程,并以具体的案例阐述CAN网络出现故障时诊断方法.【期刊名称】《装备制造技术》【年(卷),期】2010(000)002【总页数】5页(P84-88)【关键词】POLO轿车;CAN网络;原理;故障诊断【作者】田宝春【作者单位】浙江交通技师学院汽车技术系,浙江,金华,321015【正文语种】中文【中图分类】U463.6自20世纪50年代汽车技术与电子技术开始结合以来,电子技术在汽车上的应用范围也越来越广。
特别随着大规模、超大规模集成电路的运用,为汽车提供了速度快捷、功能强大、性能可靠、成本低廉的汽车电子控制系统。
但随着电子技术的普遍应用,车辆控制单元,相应的传感器和执行器的数目不断增加,使车上的线路也越来越复杂。
按照这样的发展趋势,车上的有限空间根本不能满足汽车发展的需求。
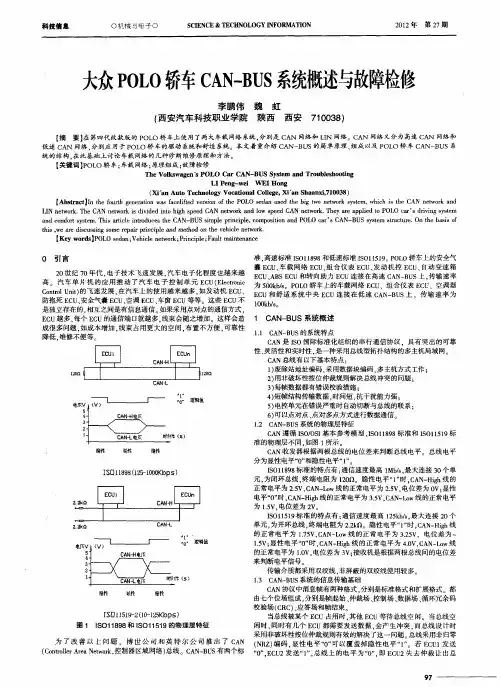
为了应对增多的控制单元与线路,现代汽车广泛采用串行数据总线传输方式(CAN总线)传递信息(如图1),即将所有信息沿两条线路传输。
这种传输方式中,线路数与控制单元以及所传递的信息量的数量是无关的。
因此当控制单元间需要交换大量信息时,CAN总线的优越性就体现了出来。
图1 串行数据总线传输方式1 CAN总线系统的特点及组成1983年由博世(Bosch)公司开发CAN数据总线应用于汽车制造业,为汽车的控制器之间的数据交换提供了一种特殊的局域网。
到上个世纪90年代,CAN以成为汽车行业内采用得最广泛的通信协议,并已成为世界串行通信协议的一种标准,为数据高速公路确定统一的“交通”规则。
CAN是Controller Area Network的缩写,称为控制单元的局域网。
CAN系统的控制单元的连接方式采用铜缆串行方式,由于控制器采用串行合用方式,因此不同控制器之间的信息传送方式称为广播式传输。
1.1 CAN总线的优点(1)总线功能有较高的可靠性和功能安全性,能减少因插头连接和导线所引起的故障。
目录引言 (1)1、车载网络通信系统的应用背景 (1)2、车载网络的发展史 (3)3、车载网络的结构与组成 (3)3.1车载网络的组成 (3)3.2 CAN数据总线的传输原理与过程 (5)4、CAN总线的特点和优点 (6)4.1 CAN BUS系统组成及性能 (6)4.2 CAN BUS数据链路控制特点 (7)4.3 数据交换原理 (7)4.4 CAN总线的可靠性 (8)4.5 CAN总线的基本特点 (8)4.6 CAN总线与其他总线相比较 (9)4.7 CAN总线的优点 (10)5、大众POLO CAN数据传输系统的检修 (10)5.1大众POLO乘用车的CAN数据传输系统的组成 (11)5.2 车载网络系统主要功能 (12)5.3 CAN数据总线驱动装置 (15)5.4 CAN数据总线系统的故障检修 (17)5.5 大众POLO乘用车的CAN总线系统的检修 (18)5.6 故障诊断排除实例—POLO轿车不能起动 ...................... ..196、总结 (20)参考文献 (22)大众POLO CAN数据总线及其检修【摘要】车载网络是现代汽车电子技术发展的必然趋势,本文就大众POLO车CAN 数据总线的工作原理及其检修作了详细、系统的分析,以便更好的理解新一代汽车电子控制系统。
【关键词】大众POLO CAN BUS 检修引言随着汽车工业日新月异的发展,现代汽车上使用了大量的电子控制装置,许多中高档轿车上采用了十几个甚至二十几个电控单元,而每一个电控单元都需要与相关的多个传感器和执行器发生通讯,并且各控制单元间也需要进行信息交换,如果每项信息都通过各自独立的数据线进行传输,这样会导致电控单元针脚数增加,整个电控系统的线束和插接件也会增加,故障率也会增加等诸多问题。
为了简化线路,提高各电控单元之间的通信速度,降低故障频率,一种新型的数据网络CAN数据总线应运而生。
CAN总线具有实时性强、传输距离较远、抗电磁干扰能力强;在自动化电子领域的汽车发动机控制部件、传感器、抗滑系统等应用中,CAN的位速率可高达1Mbps。
学习情境三大众车系车载网络系统的检修大众轿车车身很多部分都做了优化设计,有保险杠、前照灯、后车门、前后盖、前车门、仪表板及中央通道、座椅等。
除了车身变化外,还应用了大量新技术,显著提升内在品质:在电器系统的设计中,采用了新的放电前照灯、组合尾灯、蓝牙手机系统、停车辅助系统PDC、电子稳定程序ESP等。
尤其是采用了CAN总线,将动力系统和舒适系统各控制单元连接起来,简化了线束,增强了数据传输的可靠性,使整车的性能得以提高。
本项目知识目标:1.了解大众汽车车载网路的结构原理。
2.了解大众汽车车载网络的检修方法。
本项目能力目标:1、掌握大众汽车车载网络的基本组成与原理。
2、熟练掌握大众汽车拉车载网络的检修。
学习单元一大众车系CAN系统的结构与原理本单元以帕萨特领驭轿车电控系统为例,主要介绍CAN数据总线技术在汽车上的应用,由CAN总线传递数据的各控制单元的功能及其在车上的安装位置和CAN总线的连接线路。
帕萨特领驭轿车车身很多部分都做了优化设计,有保险杠、前照灯、后车门、前后盖、前车门、仪表板及中央通道、座椅等。
除了车身变化外,还应用了大量新技术,显著提升内在品质:在电器系统的设计中,采用了新的放电前照灯、组合尾灯、蓝牙手机系统、停车辅助系统PDC、电子稳定程序ESP等。
尤其是采用了CAN总线,将动力系统和舒适系统各控制单元连接起来,简化了线束,增强了数据传输的可靠性,使整车的性能得以提高。
首先介绍应用在帕萨特领驭轿车电控系统中由CAN总线传递数据的控制单元,它们是:(1)ABS控制单元Jl04;(2)发动机控制单元J220;(3)多功能转向盘控制单元J453;(4)自诊断接口Tl6;(5)组合仪表控制单元J285;(6)驾驶员侧车门控制单元J386;(7)舒适电子系统控制单元J393;(8)带记忆的驾驶员座椅调整控制单元Jl36;(9)左后车门控制单元J388;(10)前照灯调节控制单元J431;(11)安全气囊控制单元J234;(12)自动变速器控制单元J217;(13)右前车门控制单元J387;(14)收音机和导航系统控制单元J503;(15)自动空调控制单元J255;(16)右后车门控制单元J389;(17)功率放大器Rl2。
大众POLO车载网络系统的的原理与检修
戴冠军
【期刊名称】《汽车维修与保养》
【年(卷),期】2006(000)011
【摘要】@@ 随着汽车技术日新月异的发展,以及电子技术和控制技术在汽车上的大量应用,汽车上采用的电子控制模块越来越多.
【总页数】4页(P38-41)
【作者】戴冠军
【作者单位】西安公路学院
【正文语种】中文
【中图分类】U4
【相关文献】
1.大众polo车载网络组成及检修 [J], 徐立平
2.大众POLO轿车CAN网络系统控制原理与故障诊断 [J], 田宝春
3.上海大众POLO车载网络系统 [J], 旭辉
4.上汽大众POLO轿车车载网络系统结构组成与检修(下) [J], 赵宝平;刘晓雪;郭小红
5.上汽大众POLO轿车车载网络系统结构组成与检修(上) [J], 赵宝平;刘晓雪;郭小红
因版权原因,仅展示原文概要,查看原文内容请购买。
上海波罗(POLO)轿车CAN数据总线与车载网络系统(1)随着人们对汽车的安全性、舒适性、尾气排放及燃油经济性的要求越来越苛刻,这使得控制单元之间的信息交换越来越密集,传感器和导线的数量迅速增加,无形中加大了排除故障和维修的难度。
为此,必须找到一种设计优良的解决方案来使车内电子系统在不占用太大空间的情况下仍然保持其可操作性,CAN数据总线这时应运而生。
它是德国博世公司专门为大众和奥迪车系设计的,国内像奥迪A6、帕萨特B5、波罗、宝来都采用CAN数据总线,CAN 是CONTROLLER AREA NETWORK(控制单元区域网络)的缩写,这就意味着将各个控制单元之间网络化并可进行数据交流。
这又是计算机网络系统在现代汽车上的应用,利用CAN数据总线将各个控制单元连接起来,形成了车载网络系统。
一、CAN数据总线CAN数据总线是一种各控制单元间的数据传输形式,它将各个控制单元形成一个整体,所有信息都沿两条线路传输,与所参与的控制单元数及所涉及的信息量的大小无关,这样就解决了随着新增信息量的加大,线路及控制单元上的插头的数目也增加的问题,并且每条信息需要不同线路的问题也得以解决。
故国产新车宝来、波罗都应用了CAN数据总线系统,具体表现出如下优点:(1)如果数据扩展以增加新的信息,只需升级软件即可。
(2)控制单元对所传输的信息进行实时监测,监测到故障后存储故障码。
(3)使用小型控制单元及小型控制单元插孔可节省空间。
(4)使传感器信号线减至最少,控制单元间可做到高速数据传输。
(5)C AN数据总线符合国家标准,因此可应用不同型号控制单元间的数据传输。
然而,CAN数据总线为什么具有如此功能呢?让我们了解一下CAN数据总线的组成、结构和数据传输原理。
(一)C AN数据总线的组成与结构CAN数据总线由一个控制器,一个收发器,两个数据传输终端以及两条数据传输线组成。
除了数据传输线,其他元件都置于控制单元内部。
控制单元功能不变,如图1所示。