1.5M风机液压及偏航系统分析
- 格式:doc
- 大小:39.19 MB
- 文档页数:9
512 | 全国电力行业优秀管理论文集(2016)风电机组液压偏航阻尼研究1.5MW文/华电国际宁夏新能源发电有限公司 宗秀梅 张兴电机组中的偏航阻尼和制动力矩均以摩擦形式输出,因此在风电机组的长期运行中摩擦片属耗材性产品,达到最大磨损程度需立即更换,并且更换周期随摩擦状况趋于恶劣逐渐缩短。
同时偏航期间存在震动与噪声问题,对机组本身稳定性和周围环境产生不利影响,本文利用液压系统的可压缩性用一种液压阻尼装置代替传统偏航工作流程,解决上述问题同时降低风电机组运行成本。
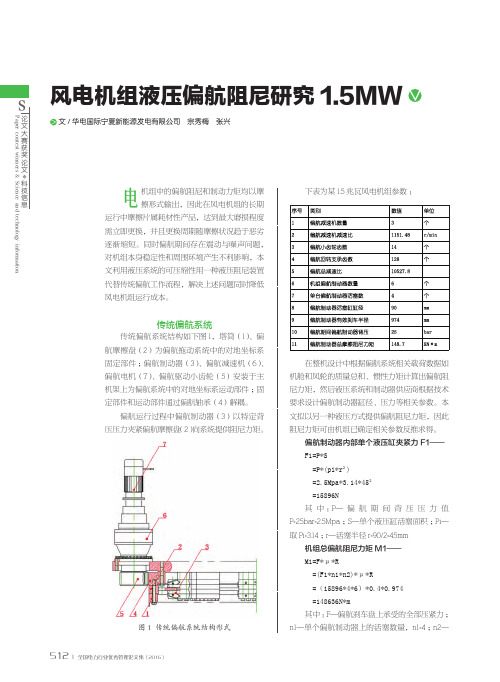
传统偏航系统传统偏航系统结构如下图1,塔筒(1)、偏航摩擦盘(2)为偏航拖动系统中的对地坐标系固定部件;偏航制动器(3)、偏航减速机(6)、偏航电机(7)、偏航驱动小齿轮(5)安装于主机架上为偏航系统中的对地坐标系运动部件;固定部件和运动部件通过偏航轴承(4)解耦。
偏航运行过程中偏航制动器(3)以特定背压压力夹紧偏航摩擦盘(2)向系统提供阻尼力矩。
图1 传统偏航系统结构形式下表为某1.5兆瓦风电机组参数:在整机设计中根据偏航系统相关载荷数据如机舱和风轮的质量总和、惯性力矩计算出偏航阻尼力矩,然后液压系统和制动器供应商根据技术要求设计偏航制动器缸径、压力等相关参数。
本文拟以另一种液压方式提供偏航阻尼力矩,因此阻尼力矩可由机组已确定相关参数反推求得。
偏航制动器内部单个液压缸夹紧力F1——F1=P*S =P*(pi*r²) =2.5Mpa*3.14*45² =15896N其中:P—偏航期间背压压力值 P=25bar=2.5Mpa ;S—单个液压缸活塞面积;Pi—取Pi=3.14;r—活塞半径r=90/2=45mm机组总偏航阻尼力矩M1——M1=F*μ*R=(F1*n1*n2)*μ*R =(15896*4*6)*0.4*0.974 =148636N*m其中:F—偏航刹车盘上承受的全部压紧力;n1—单个偏航制动器上的活塞数量,n1=4;n2—513单台机组内配置的偏航制动器数量,n2=6;μ—偏航制动器衬片与偏航摩擦片间的摩擦系数,取μ=0.4;改进的液压偏航系统图2 传统偏航系统结构形式改进的偏航系统与原偏航系统结构上的区别是在偏航电机的末端引入液压阻尼装置(8),偏航传动末梢即偏航电机(7)后端引入阻尼装置后,所有偏航过程中的震动由弹性液压系统吸收,阻尼力矩由新的系统提供,偏航过程中不再在偏航制动器(3)和偏航刹车盘(2)之间施加摩擦阻尼力矩,因此偏航制动器的摩擦片磨损大幅减少。

1.5MW风力发电机组偏航液压系统故障分析及处理发表时间:2020-12-15T14:58:29.213Z 来源:《电力设备》2020年第29期作者:尤志强[导读] 摘要:文章主要对1.5MW风力发电机组偏航系统故障中经常出现的液压系统故障的原因进行了阐述,通过对偏航系统故障产生的原因加以分析,提出了相应的解决措施,为以后更准确地分析、诊断、处理风力发电机组偏航系统故障问题提供解析参考。
(新疆达坂城新能风力发电有限责任公司新疆乌鲁木齐 830000)摘要:文章主要对1.5MW风力发电机组偏航系统故障中经常出现的液压系统故障的原因进行了阐述,通过对偏航系统故障产生的原因加以分析,提出了相应的解决措施,为以后更准确地分析、诊断、处理风力发电机组偏航系统故障问题提供解析参考。
关键词:风力发电机;液压站;偏航制动器1 前言风机变桨系统是风机的重要组成部分,主要功能是通过对叶片节距角的控制,实现最大风能捕获以及恒速运行。
我风场地处超Ι类风区,常年风频变化较快、夏季高温及冬季严寒,所使用风力发电机组在实际运行中频繁报出变桨通讯故障,导致风场大规模机组停运,重者损坏风机大型机械原件,造成更大的经济损失,直接影响了风电场的发电量和经济效益,变桨系统可靠性与安全性的要求与日俱增,解决此类问题迫在眉睫。
2 偏航系统两起事故现象及危害2019年2月5日,38号风机中央监控机报液压站反馈丢失故障,因106K4继电器损坏,导致液压站电机长时间运行烧毁,造成风机停运15天。
2019年6月9日,24号风机中央监控机报液压油油位低故障,因活塞密封圈损坏,造成制动器漏油,造成风机停运30天,两起故障对风场安全生产造成了巨大损失。
3 38#风机液压站故障原因及分析2019年2月5日,我收到缺陷单,故障为38#风机液压站电机反馈丢失、液压液位低。
我立即组织人员进行故障分析:分析液压站的压力继电器,继电器105S4是带有滞后特性的压力继电器。


【摘要】偏航系统是风电机组的核心系统之一,对控制机组稳定和保证机组发电量起着重要作用。
本文针对云南某风场1.5MW机组,增加偏航软启动系统后出现的偏航系统故障,进行故障录波和逻辑分析,有效地降低了故障发生率,以此提高偏航系统的稳定性,保证机组平稳可靠运行。
【关键词】 1.5MW机组偏航软启动故障分析运行维护1.偏航系统概述风力发电机组偏航系统是风电机组重要的组成部分,主要作用为当风速矢量的方向变化时,风力发电机组通过偏航使机组跟踪风向的变化,保证机组始终正对风向,以获得最大风能,提高发电效率。
偏航系统由偏航检测机构(风速仪、风向标、偏航编码器)、偏航控制机构(PLC、电控系统)和偏航执行机构(偏航驱动电机、偏航减速器、偏航小齿轮、偏航轴承齿盘、偏航轴承、润滑系统、偏航制动系统等)三大部分组成。
偏航检测机构将当前机组的风速、风向信号传递给PLC,PLC计算出机组当前对风角度,由PLC内部控制逻辑判断机组是否启动偏航。
当达到偏航启动条件时,PLC发出控制指令,偏航电机电子刹车打开、偏航刹车系统液压站泄压,随后PLC发出偏航软启使能信号及偏航动作信号(左偏、右偏),继而偏航电机开始运行,经过偏航减速机齿轮带动机舱在偏航齿盘上旋转,完成偏航动作。
图1:偏航控制系统框架图2.偏航软启系统云南省某风电场1.5MW机组存在偏航电气回路断路器跳闸、机组晃动大等问题。
在偏航回路增加变频器,基于变频器驱动的柔性自学习偏航系统,是对原偏航系统的有效技术改造,目的是实现偏航系统的软启动、软停止,使风机运行平稳,减少振动和机械冲击对风机带来的损害;同时减少启动电流对电机的冲击,延长电机寿命,提升机组可利用率和发电量,实现风电场提质增效。
图2:偏航软起原理图3.偏航系统问题说明系统投运半年后频繁出现由偏航相关的故障引发的机组停机现象。
通过对现场出现的故障统计分类,偏航故障主要有两类:一类是变频器自身故障,主要为电机过速、供电电源欠压、供电电源过压、电机过载、母线电压高等,此类故障发生频率很高,为普遍性故障;一类是机组偏航系统相关故障,主要为偏航传感器方向错误、偏航传感器故障,此类故障为偶发性故障,集中发生在个别几台风机组。
1.5MW风力发电机组传动系统故障与诊断分析摘要:文章主要对1.5MW风力发电机组偏航系统故障中经常出现的液压系统故障的原因进行了阐述,通过对偏航系统故障产生的原因加以分析,提出了相应的解决措施,为以后更准确地分析、诊断、处理风力发电机组偏航系统故障问题提供解析参考。
关键词:液压系统;故障分析;故障处理流动的空气形成了风,风是由风向和风速确定的。
风作为自然界的产物,具有不确定性、间歇性、随机性等特点,风向总是在不断的改变。
风力发电机组偏航系统的主要作用就是要完成风机叶轮始终正对风向的功能,充分利用风能,提高发电效率。
因此,偏航系统是水平轴风力发电机组控制系统的重要组成部分,对风力发电机组安全、稳定、高效地运行有着十分重要的作用。
邹城风电场设计共安装风力发电机组33台,单机容量1.5MW,总装机容量为49.5MW;电场风机投运一年多来,出现多台风机频发偏航液压系统故障造成风机停机事件,在造成电量损失的同时也给电场安全、稳定、高效运行带来不利影响。
1、大型风力发电机组传动系统的重要性在大型风力发电机组中,系统结构配置和布局优化不仅承担着与驱动链的连接,并将风轮的扭矩传递给驱动链的责任,而且要承担着风力发电机组容量增大而带来的更大的负荷。
一般风力发电机组系统在整个风力发电机组的重量中占有重要作用,由此可看出风电机组设计和制造过程中传动系统结构配置和布局优化的重要。
尤其是近年来,风力发电机组的容量不断增大,目前已安装的最大机组容量已达到5MW的大型风力发电机组,最大风轮直径更是达到150米左右,塔架高度高达100米,这种大容量的风力发电机组导致在结构配置上存在很大问题,而且工况更为复杂,因此优化设计的好坏直接关乎整个机组的运行和使用寿命,由此可见风力发电机组中传动系统的重要地位。
在风力发电机组中传动系统具有举足轻重的地位,要保证整个风力发电机组的可靠性和安全性,除了准确确定各部位的应力分布外,还应注重传统系统材料的选择和各单元属性,进而再进行拓扑优化设计,如此才能确保风力发电机的可靠性,进而为整个大型风电机组的安全运行和使用寿命提高保证。
风力发电机组偏航系统详细介绍资讯频道2012-12-15 偏航系统是水平轴式风力发电机组必不可少的组成系统之一。
偏航系统的主要作用有两个。
其一是与风力发电机组的控制系统相互配合,使风力发电机组的风轮始终处于迎风状态,充分利用风能,提高风力发电机组的发电效率;其二是提供必要的锁紧力矩,以保障风力发电机组的安全运行。
风力发电机组的偏航系统一般分为主动偏航系统和被动偏航系统。
被动偏航指的是依靠风力通过相关机构完成机组风轮对风动作的偏航方式,常见的有尾舵、舵轮和下风向三种;主动偏航指的是采用电力或液压拖动来完成对风动作的偏航方式,常见的有齿轮驱动和滑动两种形式。
对于并网型风力发电机组来说,通常都采用主动偏航的齿轮驱动形式。
1.偏航系统的技术要求1.1. 环境条件在进行偏航系统的设计时,必须考虑的环境条件如下:1) . 温度;2) . 湿度;3) . 阳光辐射;4) . 雨、冰雹、雪和冰;5) . 化学活性物质;6) . 机械活动微粒;7) . 盐雾。
风电材料设备8) . 近海环境需要考虑附加特殊条件。
应根据典型值或可变条件的限制,确定设计用的气候条件。
选择设计值时,应考虑几种气候条件同时出现的可能性。
在与年轮周期相对应的正常限制范围内,气候条件的变化应不影响所设计的风力发电机组偏航系统的正常运行。
1.2. 电缆为保证机组悬垂部分电缆不至于产生过度的纽绞而使电缆断裂失效,必须使电缆有足够的悬垂量,在设计上要采用冗余设计。
电缆悬垂量的多少是根据电缆所允许的扭转角度确定的。
1.3. 阻尼为避免风力发电机组在偏航过程中产生过大的振动而造成整机的共振,偏航系统在机组偏航时必须具有合适的阻尼力矩。
阻尼力矩的大小要根据机舱和风轮质量总和的惯性力矩来确定。
其基本的确定原则为确保风力发电机组在偏航时应动作平稳顺畅不产生振动。
只有在阻尼力矩的作用下,机组的风轮才能够定位准确,充分利用风能进行发电。
1.4. 解缆和纽缆保护解缆和纽缆保护是风力发电机组的偏航系统所必须具有的主要功能。
金风 1.5WM风力发电机组冲限位分析摘要:经过了一段时间的现场的实习,我对MW机组有了一定的了解,对于一些故障,有了一些自己的看法,下面结合在北票现场处理故障的一点收获,对经常发生的冲限位问题进行一定的分析。
关键字:冲限位,旋转编码器,接近开关,齿形带一、变桨系统的基本组成(一)、变桨系统目的使叶片的攻角在一定范围(0度---90度)变化,以便调节输出功率,避免了定桨距机组在确定攻角后,有可能夏季发电低,而冬季又超发的问题。
在低风速段,功率得到优化,能更好的将风能转化电能。
(二)、它可以分为以下几个阶段:1、启动阶段:叶片从顺桨位置开始,直到叶轮转速增加到9RPM或10RPM,风机开始发电。
这个过程为变速、变桨过程;风机开始发电时叶片角度大小由风的状况决定,目前主控软件规定,在切入风速下,开始发电时叶片角度在1.5°.2、变速阶段:这个阶段在额定风速以下,叶轮瞬间转速低于变桨转速设定值,风机输出功率瞬时值也低于风机额定输出功率;要实现的主要目标就是让叶轮尽可能多的吸收风能。
由于额定风速以下风速较小,因此,此时没有必要变桨,只需要此时将叶片角度设置为规定的最小桨矩角。
3、恒速阶段:该阶段同样不会变桨。
虽然叶轮瞬间转速达到变桨转速设定值,但由于风机输出功率瞬时值低于风机额定输出功率,所以由GH控制策略计算出的变桨速率依然为负值。
而此时叶片当前角度同样是风机运行过程中,主控软件所规定的最小值,因此无法再继续减小叶片桨距角。
4、恒功率阶段:该阶段在额定风速以上,通过扭矩控制器及变桨控制器共同作用,使得功率、扭矩相对平稳;功率曲线较好。
二、影响冲限位的元件金风1.5MW机组变桨系统主要由:超级电容,A10模块,AC2变频器,NG5开关电源,变桨电机,接近开关,限位开关,旋转编码器,T1,变桨子站等组成元件。
下面对主要易造成冲限位的几个元件进行说明:(一)、接近开关工作原理:接近开关可以无损不接触地检测金属物体。
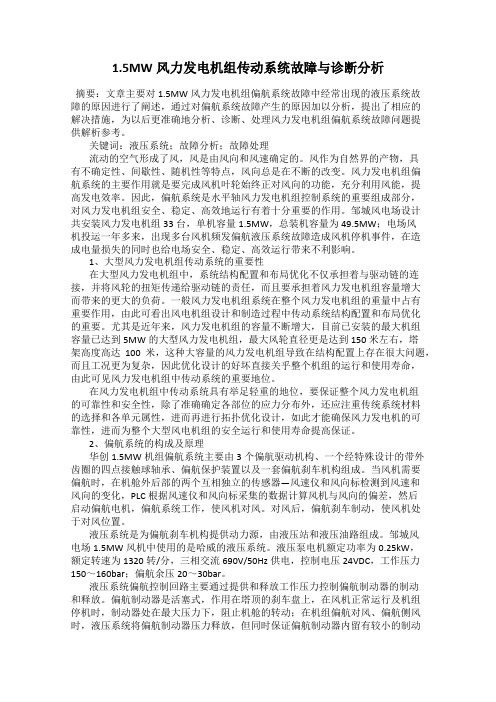
1.5M风机液压系统及偏航系统分析1.5M风机中使用的是哈威的液压系统。
液压泵电机额定功率为0.25Kw,额定转速为1320转/分,三相交流690V50Hz供电。
液压系统如图:液压系统功能如下:1、为偏航闸提供140—160bar的液压压力;2、为叶轮锁定闸提供锁定压力;3、在特殊情况下,可以用液压站上的手动液压泵为叶轮锁定闸提供锁定压力。
系统油路分析如下:截流手阀7.1、12.6 旋紧拧死,截流手阀11.2、6.1旋松打开。
(5个的六方扳手)正常工作状态(不偏航):电磁阀9.1、12.1、12.2的线圈均始终不得电。
正常工作状态(偏航):电磁阀12.2线圈始终得电,电磁阀9.1、12.1的线圈均始终不得电。
使用液压闸锁定叶轮时:电磁阀9.1的线圈得电。
叶轮锁定闸建压:电磁阀9.1的线圈得电阀芯动作,P口和A口连通,液压泵1.3工作建压,液压油流经导流块的P通道,进入滤芯3,经过单向阀4,进入阀组9经P口A口液压油进入叶轮闸的液压缸内,在液压压力的作用下叶轮锁定闸动作闭合。
叶轮锁定闸失压:电磁阀9.1的线圈失电,电磁阀的阀芯在弹簧力的作用下阀芯动作归位,A口和T口连通,液压油在叶轮锁定闸上的归位弹簧的作用下液压油经过A口T口流回油箱。
偏航闸建压:偏航电磁阀12.2和偏航泄压电磁阀12.1的线圈失电(不得电),阀组的P口与A口连通,液压泵工作建压,液压油流经导流块的P通道,进入滤芯3,经过单向阀4,经过截流手阀11.2,经过单向阀12.5,经过不可调节流孔12.3,流过阀组的P口与A口进入,液压油进入偏航闸的油缸内。
偏航闸泄压松闸:偏航电磁阀12.2的线圈得电阀芯动作,使A口与T口连通A口与P口关闭,液压油由偏航油缸回流入A口,经过溢流阀12.4和管路,进入连接块的R口,回流入油箱。
各个部分的简介:贮压罐7偏航电磁阀12.2压力表6偏航余压溢流阀12.4偏航卸压电磁阀12.1(偏航清洁/零压力电磁阀)偏航油管B加油口1.5偏航油管A叶轮锁定闸油管叶轮锁定闸电磁阀9.1压力继电器10滤芯堵塞发讯器3.1 截流手阀11.2系统溢流阀5截流手阀7.1截流手阀6.1贮压罐的作用:在液压泵间隙工作时产生的压力进行能量存贮; 在液压泵损坏时做紧急动力源; 泄漏损失的补偿; 缓冲周期性的冲击和振荡; 温度和压力变化时所需的容量补偿。
电磁阀的作用:利用阀芯位置的改变,改变阀体上各油口的连通或断开状态,从而控制油路的连通、断开或改变方向。
图示中P 表示压力油的进口,T 表示与油箱连通的回油口,A 和B 表示连接其它工作油路的油口 。
溢流阀的作用:利用作用阀芯上的液体压力和弹簧力的相平衡的原理在某一调定压力下产生动作。
截流手阀12.6油窗及油位开关1.4手泵1.3放油阀1.8 接线盒单向阀的作用:控制油液只能按一个方向流动而反向截止。
注意:电磁阀12.2和9.1都可以用手动使阀芯动作。
故障及电路分析:故障名称:error_hydraulic_working_time:建压超时故障error_hydraulic_motor_feedback:液压站电机反馈丢失故障error_hydraulic_oil_level:液压液位低故障L1L324V-105Q20V风机液压站建压相关电路图(见图纸的105页和106页)。
压力继电器-105S4是一个带有滞后特性的压力继电器。
压力继电器的线接在常闭触点上。
空气开关-105Q2始终闭合(除非人为打开或过负载跳开)。
当风机的压力系统无任何故障时,当系统压力低于140bar时,压力继电器-105S4的触点闭合,模块-119DI9的8号插线端子由0V变成24V,即输入信号hydraulic activte pump由低电平变成高电平,模块-120DO1的4号插线端子的hydraulic yaw system enable信号为高电平信号,输出直流24V,继电器-106K4的线圈得电触点吸合。
-106K3线圈得电触点吸合,液压泵工作建压。
当压力超过160bar时压力继电器-105S4常闭触点断开,输入信号hydraulic activte pump由高电平变成低电平,模块-120DO1的4号插线端子的hydraulic yaw system enable信号变为低电平信号,输出直流0V,继电器-106K4的线圈失电触点断开。
液压泵停止工作。
建压时间不超过90秒为宜。
当建压时间超过2分钟压力继电器检测压力还没有达到160bar时,风机报error_hydraulic_working_time故障,即建压超时故障。
可以参照上图检查线路及相关模块是否有问题,若没有问题,则需要参照液压系统图纸检查相关的电磁阀工作是否正常,检查液压管路是否有泄漏。
当压力低于140bar时压力继电器的触点闭合,模块-119DI9D的8号插线端子由0V变成24V,当模块-119DI5的5号插线端子没有从0V 变成24V 超过4秒,风机报error_hydraulic_motor_feedback 故障,即液压站电机反馈丢失故障。
可以参照上图检查线路及相关模块是否有问题。
当液压站的油箱内贮满油时,液位继电器的线接在常闭触点上;油中没有油时液位继电器的线接在常开触点上(图中显示的是没油时的状态)。
当模块-119DI7的5号插线端子上的电压由24V 变成0V 超过6秒时,风机报error_hydraulic_oil_level 故障,即液压液位低故障。
可以首先检查液压站的液位是否真的低到报警的程度,若没有,那么可以参照上图检查线路及相关模块是否有问题。
电磁阀控制线路及偏航控制线路图:(见图纸102页、103页、105页和106页)特殊情况下用手泵锁定叶轮的方法:将旋转手柄向外旋转到较大位置,把备紧螺帽旋松,用4个的六方扳手把内六方顶丝旋入到最大位置,然后把旋转手柄向内旋入旋紧。
此时电磁阀的A 口与P 口连通,T 口与A 口闭死。
使用手泵建压可使叶轮锁定闸闭合将叶轮锁定(相关阀体的操作可根据液压油路图纸而定)。
偏航系统分析:旋转手柄 备紧螺帽内六方顶丝1.5兆瓦风机的偏航系统(除液压站外)包括:偏航电机、偏航减速器、机舱位置传感器、偏航加脂器、毛毡齿润滑器、偏航轴承、偏航刹车闸、偏航刹车盘。
偏航轴承采用四点接触球转盘轴承结构。
偏航电机是多极电机,电压等级为400V,内部绕组接线为星形。
电机的轴末端装有一个电磁刹车装置,用于在偏航停止时使电机锁定,从而将偏航传动锁定。
附加的电磁刹车手动释放装置,在需要时可将手柄抬起刹车释放。
偏航刹车闸为液压盘式,由液压系统提供约140~160bar的压力,使刹车片紧压在刹车盘上,提供足够的制动力。
偏航时,液压释放但保持24bar的余压,这样一来,偏航过程中始终保持一定的阻尼力矩,大大减少风机在偏航过程中的冲击载荷。
偏航刹车盘是一个固定在偏航轴承上的圆环。
偏航减速器为一个行星传动的齿轮箱,将偏航电机发出的高转速低扭矩动能转化成低转速高扭矩动能。
机舱位置传感器内是一个10千欧姆的环形电阻,风机通过电阻的变化,确定风机的偏航角度并通过其电阻的变化计算偏航的速度。
偏航加脂器负责给偏航轴承的润滑加脂的工作。
毛毡齿润滑器负责给偏航齿的润滑。
故障及电路分析:故障名称:error_yaw_position;偏航位置故障error_yaw_right_feedback;右偏航反馈丢失error_yaw_position_sensor;偏航位置传感器故障error_yaw_left_feedback;左偏航反馈丢失error_yaw_speed;偏航速度故障(偏航过载)偏航控制回路相关电路图(见图纸的103页、106页、109页和114页)当风机的处于无故障状态时,模块-120DO8的1号插线端子的yaw system enable信号始终为高电平信号,输出直流24V,继电器-114K8的线圈得电触点吸合。
空气开关-102Q2始终闭合(除非人为打开或过负载跳开)。
因此接触器-103K4的线圈始终得电,其触点始终是吸合的。
当风机检测其向左或向右偏航的角度超过920度并持续2秒钟风机报error_yaw_position故障,即偏航位置故障。
检查由模块到机舱位置传感器的接线,若接线正常,检查机舱位置传感器是否能正常工作并检查电阻阻值是否正常,若不正常则证明机舱位置传感器的滑线电阻损坏,若以上检查都正常,则可以拆下机舱位置传感器,旋转凸轮改变电阻看系统显示的偏航位置变化能否正常,不正常则更换相应模块。
同时还要检查系统设置的解缆参数是否正确。
当风机持续4秒钟检测的偏航位置信号小于10(数值小于10代表输入的信号有错误,输出数据的大小与模块的处理方式有关,参见相关模块的使用说明书),则风机报error_yaw_position_sensor故障,即偏航位置传感器故障。
检查由模块到机舱位置传感器的接线,若接线正常,检查机舱位置传感器是否能正常工作并检查电阻阻值是否正常,若不正常则证明机舱位置传感器的滑线电阻损坏,若以上检查都正常,则可以拆下机舱位置传感器,旋转凸轮改变电阻看系统显示的偏航位置变化能否正常,不正常则更换相应模块。
在风机向左或向右偏航时,持续70秒钟程序计算的偏航速度小于0.15度/秒时风机报error_yaw_speed故障,即偏航速度故障(偏航过载)。
发生这样的故障时一定要先检查相应得线路及接触器和空气开关是否正常,机舱内是否有异味,检查偏航电机的电阻是否正常,检查风机能否偏航,检查风机偏航时声音是否正常,检查偏航电磁阀能否正常工作等等,总之这个故障要根据发生故障时的现象具体分析,查找故障发生的原因并加以处理。
当风机发出向左偏航信号后持续4秒钟没有收到左偏航反馈信号,则风机报error_yaw_left_feedback故障,即左偏航反馈丢失;同样当风机发出向右偏航信号后持续4秒钟没有收到右偏航反馈信号,则风机报error_yaw_right_feedback故障,即右偏航反馈丢失。
检查相应的线路及模块是否正常。
偏航系统示意图:偏航电机电机接线盒偏航减速器偏航小齿轮偏航齿润滑器震动开关偏航闸机舱位置传感器偏航对风动作判断:当60秒平均风向角度持续20秒小于155度时,风机向左偏航对风;当60秒平均风向角度持续3.5分钟小于171度时,风机向左偏航对风,当30秒平均风向角度持续3秒大于175时,风机停止向左偏航。
当60秒平均风向角度持续20秒大于205度时,风机向右偏航对风;当60秒平均风向角度持续3.5分钟大于189度时,风机向左偏航对风,当30秒平均风向角度持续3秒小于185时,风机停止向右偏航。
自动加脂器渐进式分油器自动润滑加脂孔偏航刹车盘。