塔机起升机构变极调速的原理分析及控制电路的改进
- 格式:pdf
- 大小:339.65 KB
- 文档页数:2
工学硕士学位论文塔机起升机构变频调速控制技术研究苏勇君摘要随着工程建设发展的需要,塔式起重机日益成为现代建筑施工中不可缺少的重要起重机械。
在塔机的各工作机构中,起升机构最为重要,其工作性能直接影响到塔机整机的工作效率和安全性。
频繁的启动、制动是塔机工作过程的主要特点,因此性能良好的调速系统是塔机平稳、可靠运行的重要保障。
针对目前我国塔式起重机行业中起升机构调速方法存在的调速性能差、效率低、能耗高等不足,本文在分析塔机起升机构调速特点及调速原理的基础上,对起升机构中电机矢量控制变频调速的控制算法进行研究,并对其调速性能进行了仿真与实验对比分析。
针对如何提高塔式起重机调速装置运行过程中的平稳性、安全性和高效性问题,分析了塔机起升机构的工作特点,建立了起升机构调速过程中各工作参数间的关系,并对调速系统的机械特性进行了分析。
对比分析了目前应用于塔式起重机的各种调速方法结构特点和调速性能,针对塔机起升机构的起动力矩大、工作载荷变化范围宽的特点,结合矢量控制原理建立了矢量控制变频调速电机仿真模型;对比分析了 PID 控制方法与模糊控制方法的特点,建立了 PID 参数模糊调整模型,分别利用基于 PID 控制算法和模糊 PID 控制算法的矢量控制变频调速电机模型,对塔机起升机构的调速性能进行了仿真研究。
仿真结果表明,模糊 PID 控制方法具有动态响应快、超调小及稳态误差小等优点,其动、静态性能优于单一PID 控制和单一模糊控制,是提高塔机起升机构调速性能的有效控制方法。
最后进行了塔机起升机构变频调速的实验研究。
完成了实验系统元件的设计和计算选型,通过对电机的电流、转矩等性能参数的测试,分析了起升机构中电机矢量控制变频调速性能。
关键词塔机起升机构;变频调速;矢量控制;PID 控制;模糊 PID 控制- I -哈尔滨工业大学工学硕士学位论文AbstractWith the demand of the engineering construction development, tower cranes become necessary machines in modern architecture buildings. In the gearing of cranes, the most important and most typical gearing is hoisting mechanism. Capability of the hoisting mechanism has great influence on working efficiency and security of crane. Frequent startup and brake is main characteristic in course of crane work. So well behaved speed regulation system is an important guarantee of stable and reliable work.According to poor capability of speed regulation, low efficiency and great energy consumption in speed regulation method of hoisting mechanism, the paper researches control algorithm by electric machine vector controlling variable frequency control and compares simulation and experiment based on analyzing characteristic and principle of speed regulation.To improve the stability, safety and high efficiency of hoisting mechanismin running, the mechanical character of hoisting mechanism and the relation of working parameters are analyzed.By analyzing the structure character and speed adjusting property of the method currently used in tower crane, an asynchronous motor module was built based on vector control theory; comparative analysis of the character of PID controller and fuzzy controller, the control property of hoisting mechanism of tower crane was analyzed by the control system simulation. It was shown in simulation result that fuzzy—PID control method has the advantage of high property in dynamic response, less error in stability and less over-swing, and thedynamic and stabilityproperty is better than any single PID controller or fuzzy controller, so fuzzy—PID is an effective method to improve the property ofhoisting mechanism, and it is suitable to apply it in a large starting torqueworking situation.Finally, experimental research of the variable frequency control system wasmade based on a crane model. Designs and calculating selected types of system components are finished. Controlling capability of variable frequent speed byelectric machine vector is analyzed by testing capability parameters of motor- II -哈尔滨工业大学工学硕士学位论文current, torque and hoisting speed.Keywords tower crane hoisting mechanism, variable-frequency speed regulation,vector control, PID control, fuzzy-PID control- III -哈尔滨工业大学工学硕士学位论文目录第 1 章绪论 (1)1.1 课题研究的目的和意义 (1)1.2 国内外研究现状 (3)1.2.1 国内外塔式起重机调速系统发展过程及现状 (3)1.2.2 国内外塔机控制系统发展现状 (5)1.3 本课题主要研究的内容 (7)第 2 章塔机变频调速相关技术 (8)2.1 塔式起重机概述 (8)2.2 变频调速的基本原理 (9)2.2.1 变频器的基本工作原理 (9)2.2.2 变频器的基本结构 (11)2.2.3 变频器的控制方式 (12)2.3 塔机起升机构变频调速原理及其机械特性 (13)2.3.1 塔机起升机构的变频调速原理 (13)2.3.2 塔机起升机构调速过程中工作参数的相互关系分析 (14)2.3.3 塔机起升机构变频调速系统的机械特性 (16)2.4 本章小结 (17)第 3 章塔机起升机构中电机变频调速矢量控制建模 (19)3.1 矢量控制原理 (19)3.1.1 矢量控制的基本思想 (19)3.1.2 坐标变换及其数学模型 (21)3.1.3 矢量控制的基本方程 (24)3.2 起升机构中电机矢量控制模型的建立 (24)3.2.1 电压型矢量控制回路的选取 (25)3.2.2 电机矢量控制仿真模型的建立 (30)3.3 本章小结 (32)第 4 章起升机构电机变频调速控制算法与仿真研究 (34)- IV -哈尔滨工业大学工学硕士学位论文4.1 PID控制 (34)4.1.1 PID控制的原理 (34)4.1.2 数字PID控制算法 (35)4.2 模糊—PID控制 (36)4.2.1 模糊控制原理 (37)4.2.2 PID控制器参数Fuzzy调整原理 (38)4.2.3 PID参数Fuzzy调整模型的建立 (39)4.2.4 Fuzzy合成推理算法及调整决策矩阵 (41)4.3 塔机起升机构变频调速控制算法仿真 (44)4.3.1 PID控制仿真 (44)4.3.2 模糊--PID控制系统的仿真 (46)4.4 本章小结 (50)第 5 章塔机起升机构变频调速试验系统设计与调速性能分析 (51)5.1 实验前的准备 (51)5.1.1 塔式起重机模型简介 (51)5.1.2 变频器的选取 (53)5.1.3 系统参数设计 (54)5.2 起升机构矢量控制变频调速系统性能测试与分析 (56)5.3 本章小结 (60)结论 (61)参考文献 (62)致谢 (67)- V -哈尔滨工业大学工学硕士学位论文第1章绪论1.1 课题研究的目的和意义工程起重机由于具备机动、灵活、作业半径大等特点,被广泛应用于工矿企业、建筑工地、港口码头及市内起重安装,尤其适用于高层住宅建筑等起重作业。
变频调速技术原理及其在塔式起重机中的应用1.塔式起重机常见调速方式2.变频调速原理3.变频器的基础知识4.变频调速在塔机应用中需要注意的问题5.基于通讯的塔机变频调速系统1.塔式起重机常见调速方式(1)通过选择多极电机进行调速如QTZ40塔机起升机构常用4/8/24或4/8/32极电机,对应的起升机构会有对应的3种运行速度。
多极电机由于受空间位置的制约,所以磁极数量不可能太多,磁极数量的增多会带来电机效率的降低和成本的上升,一般来讲,4/8/32极电机会比4/8/24电机贵一些。
(2)通过增大能量损耗来获取调速性能如QTZ63以上型号塔机的起升机构一般选取绕线转子异步电动机,通过向电机转子回路串入不同的电阻,从而增加能耗来进行调速。
因为电机输入能量一定的前提下,串入电阻越大,发热越多,用来拖动负载转动的能量越少,电机输出转速就越低。
(3)变频调速通过改变进入电机的电流频率进行调速。
2.变频调速原理2.1异步电动机的旋转原理异步电动机主要由三部分组成:1.磁路部分;2.电路部分;3.机械部分。
磁路部分主要由定子和转子铁心构成,电路部分主要由定子和转子绕组构成,机械部分主要有机座、轴承等构成。
电动机通电后,其定子会产生一个合成磁场,合成磁场会根据定子部件铁心的分布以及通入电流的频率进行旋转。
这个磁场的旋转速度通常称同步转速,同步转速由下式决定:n=60f/po式中:f—电流的频率;p—旋转磁场的磁极对数。
电磁转矩的方向由于合成磁场的旋转,从而使电机转子的绕组被动切割磁力线产生感应电流,又因磁场会对载流导体产生电磁力,所以在电磁力的作用下,转子会“随着”定子磁场旋转起来。
转子的转速nm 低于定子磁场的转速n o ,转子的转速n m 我们称之谓“异步”转速。
2.2异步电动机的调速由n=60f/p分析可知,异步电动机的转速n0与电流频率f成正比,与电机磁极对数成反比,所以改变同步转速的方法有2种。
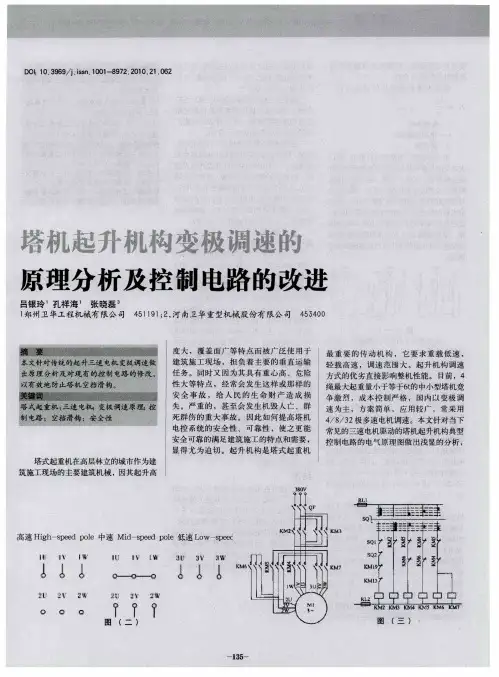
2.2.1改变磁极对数p定子磁场的磁极对数取决于定子绕组的结构布置。
塔式起重机电气控制电路分析由于塔式起重机电动机较多,对应每一台电动机的控制电路也较复杂,为了分析电路图方便,我们用对应的方法进行标注,例如:M5的控制电器有KM5,KM51,KM52,KM53,SQ51,SQ52,SA5等。
(1)电源部分三相四线制380V电源用一根四心重型橡套电缆(3*16+1*6)送到电缆卷筒的集电环W1上。
经过装在电缆卷筒旁的铁壳开关QS、FU1,再用电缆送到装在驾驶室内的自动开关QF上,然后分送给主电路、控制电路和信号测量电路。
集电环的结构与环线式转子的滑环和电刷相类似,主要由滑环和碳刷等组成。
滑环装在有关的转动部件上,碳刷装在不动的部件上,转动部件上的电源可以通过集电环装置与不动部件上的导线连接起来。
W1用于行走机构,W2用于变幅机构的连线。
铁壳开关QS是全机电源的隔离开关熔断器EU1作为全机的后备短路保护。
本机加装了一个具有电磁脱扣器和热脱扣器的自动开关QF,脱扣电流为100A,作为本机的适中和过载保护,是保护更加完善,故障跳闸后恢复供电更加迅速。
为了使司机和维修人员在检查和修理时有一个明亮和舒适的工作环境,照明灯E、电铃HA以及电炉和电扇的插座XS1和XS2不受自动开关QF控制。
还设有电源指示灯HL、电流表A、电压表V、以便监视电源的工作情况。
因起重机高度大,变幅时不准提升,回转或行走,以保护安全。
为此用两个接触器KM1和KM5控制这两部分主电路的电源。
KM1用按钮SB1操作。
KM5用按钮SB5操作。
KM1和KM5之间不但有按钮互锁,而且有接触器触点互锁,使两者不能同时动作,以满足变幅时不准提升、行走和回转的要求。
(2)变幅部分各电气元件的作用①接触器KM51和KM52 实现电动机的正反转,起重臂上仰或下俯。
两者之间有电气互锁,防止因故同时动作而造成电源相间短路。
②接触器KM53 起动结束后短接频敏电阻器,以便提高电动机的转速,减小损耗。
KM53装在电动机M5旁,它的线圈有一端接在M5定子U相上。
浅谈变频器在塔式起重机起升机构的改进与应用摘要: 本文阐述了塔机起升机构采用变频调控技术取代传统变速调速,选用合适变频器,实现塔机无极调速,提高塔机控制精度和系统的可靠性。
进而实现了塔机的半自动化控制。
关键词:起升机构;变频技术;变频器Abstract: This paper describes the lifting mechanism in the tower crane using frequency control technology to replace the traditional transmission speed, selecting appropriate converter, realizing stepless speed regulation of tower crane tower crane, improve control accuracy and reliability of the system. To realize the semi-automatic control of tower crane.Key words: lifting mechanism; frequency conversion technology; frequency converter一、引言随着我国经济的快速发展,塔机的应用日益普遍需求量快速增长。
全国塔机已达到10万台以上,现代科技的迅猛发展,变频调控技术在电力托动系统中得到广泛应用,采用变频调控技术取代老式变阻调速,实现塔机无机调速,提高了控制精度和系统的可靠性,进而实现了起重机的半自动化控制。
现在变频技术的不断发展,不断地被人们认识,它以绝对的优势超越了其他的任何调速方案,其优点数不胜数,如:零速抱闸,对制动器无磨损;任意低的就位速度,可用于精确吊装;速度的平滑过渡,对机构和结构件无冲击,提高了塔机的运行安全性;极低的起动电流,减轻了用户电网扩容的负担;几乎任意宽的调速范围,提高了塔机的工作效率;节能的调速方式,减少了系统运行能耗。
塔式起重机中的变频技术应用探究1、塔式起重机常见调速方式塔式起重机在工业与民用建筑施工中广泛应用,因其提升高度大、司机室位置较高,使得操纵难度大,对吊重的快速、准确就位要求高,所以塔式起重机的起升机构调速性能要求很高。
塔式起重机常见的调速方式有以下几种:(1)通过选择多极电机进行调速。
如QTZ40塔机起升机构常用4/8/24或4/8/32极电机,对应的起升机构会有对应的3种运行速度。
(2)通过增大能量损耗来获取调速性能。
如QTZ63以上型号塔机的起升机构一般选取绕线转子异步电动机,通过向电机转子回路串入不同的电阻,从而增加能耗来进行调速。
(3)变频调速。
通过改变进入电机的电流频率进行调速。
多极电动机调速机构、能耗制动调速机构等都存在着调速范围小、速度稳定性差等缺点,无法长时间低速下降载荷,而且可靠性低、维护量大、能耗高。
目前国内外普遍采用变频调速技术。
2、变频调速原理电动机通电后,其定子会产生一个合成磁场,合成磁场会根据定子部件铁心的分布以及通入电流的频率进行旋转。
这个磁场的旋转速度通常称同步转速,同步转速由下式决定:n0=60f/p式中:f—电流的频率;p—旋转磁场的磁极对数。
由于合成磁场的旋转,从而使电机转子的绕组被动切割磁力线产生感应电流,又因磁场会对载流导体产生电磁力,所以在电磁力的作用下,转子会“随着”定子磁场旋转起来。
转子的转速nm 低于定子磁场的转速n0,转子的转速nm我们称之谓“异步”转速。
由n0=60f/p分析可知,异步电动机的转速n0与电流频率f成正比,与电机磁极对数成反比,所以改变同步转速的方法有2种:(1)改变磁极对数p。
(2)改变接入电流频率f。
3、电动机的选择塔机起升机构电机应选用适合频繁起动、转动惯量小、起动转矩大的变频电机,目前以4极作变频电机首选极数。
电动机功率P按下式计算式中:W—额定起重量(最小幅度时)+吊钩质量+ 钢丝绳质量();—提升速度(m/ s);—机械效率。
塔吊电气控制线路原理说明塔式起重机电气控制线路是塔机的重要组成部分。
塔机是一种起重机械,具有回转半径大、提升高度高、操作简单、装卸容易等优点,是建筑工地普遍使用的一种起重机械。
塔机由金属结构部分、机械传动部分、电气系统和安全保护装置组成。
电气系统由电动机、控制系统、照明系统组成。
通过操作控制开关完成重物升降、塔臂回转和小车行走操作。
塔机有多种类型,如轨道行走式、固定式、内爬式、附着式、平臂式、动臂式等,目前建筑施工和安装工程中使用较多的是上回转自升固定平臂式。
本文以QTZ80型塔式起重机为例,对电气控制原理进行分析。
主回路部分是塔机电气控制线路的重要组成部分。
控制线路总起动部分和小车行走控制也是塔机电气控制线路的重要组成部分。
小车行走控制线路可以控制小车以高、中、低三种速度向前、向后行进。
线路保护包括终点极限保护、临近终点减速保护和力矩超限保护。
塔臂回转控制线路是塔机电气控制线路的另一个重要组成部分。
回转控制开关可以控制塔臂以高、中、低三种速度向左、向右旋转。
线路保护包括回转角度限位保护和回转角度临界减速保护。
起升控制是塔机电气控制线路的最后一个组成部分。
操作起升控制开关可以用低、中、高三种速度起吊。
起升控制线路如图3-11所示。
为了更好地分析电气控制过程,我们将提升状态的五个档位对应的控制线路分解,如图3-12至3-15所示。
在控制开关拨至上升第Ⅰ档时,S1和S3闭合,控制线路分解为图3-12.接触器2KM1得电,力矩限制接触器1KM2触头处于闭合状态。
2KM3得电使低速支路长开触头闭合,2KM6和2KM5相继得电,对应主线路2KM6闭合,转子电阻全部接入,2KM1闭合,转子电压加在液压制动器电机M2上,使之处于半制动状态,2KM5闭合,滑环电动机M3定子绕组8级接法,2KM3闭合,电动机得电低速正转(上升)。
通过线间变压器201抽头110伏交流电经2KM1触头再经75号线接入桥堆,涡流制动器起动。

浅谈现代塔式起重机起升机构的改进(1 沈阳三洋建筑机械有限公司,辽宁沈阳 110000,2 抚顺隆基磁电科技有限公司,辽宁抚顺 113000)摘要:本文着重从调速方式、结构形式和起升卷筒这三方面阐述了现代塔式起重机起升机构的改进。
关键字:变频调速L型传动双折线绳槽中图分类号:TD422.4+7 文献标识码:A 文章编号:1673-0992(2010)05A-0017-01近年来,随着建设工程规模不断扩大,以及高层建筑的安装工作的逐年增多,对塔式起重机(以下简称“塔机”)的制造质量和整机技术水平的要求也越来越高。
起升机构是塔机最重要的,也是最具有技术代表性的传动机构。
改进起升机构直接影响整个塔式起重机性能。
随着科学技术的发展塔机起升机构在调速方式、传动形式和起升卷筒上都有较大的改进。
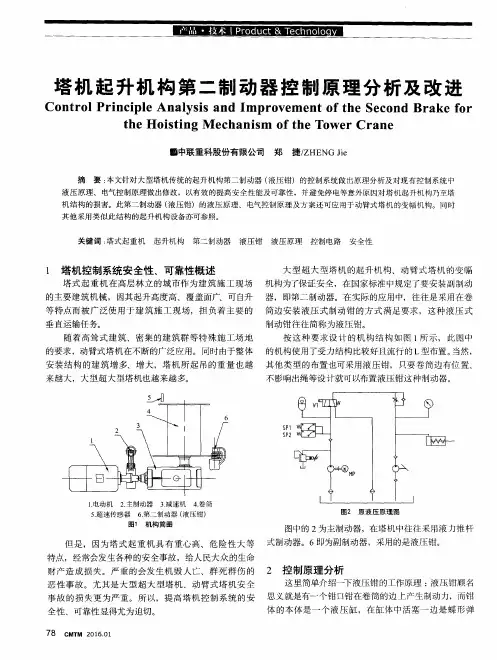
塔机起升机构通常由电动机、联轴(制动)器、起升卷筒、钢丝绳、减速器、底架及限位器等零部件组成。
(如图1)一、调速方式传统的塔机起升机构调速方式一般采用:(1)多速电机变极调速;(2)电磁离合器换挡的减速器加带涡流制动的单速绕线转子电机;(3)普通减速器加带涡流制动的多速绕线转子电机;(4)差动行星减速器加双电机。
以上4种传统起升机构调速方式有其共同缺点:调速范围小,无法高速运行,只能在额定速度以下调速;且低速就位性能差;起动电流大,对电网冲击大。
目前,变频调速技术替代了传统的调速方法,在我国塔机起升机构中已经成为主流的调速方式,是当今较先进的交流调速方式。
它的传动控制技术采用“变频调速电动机+变频装置”来实现变频调速的。
变频调速的原理是通过改变电动机定子供电频率来改变同步转述而实现调速。
其特点:无级调速,调速范围宽,运行平稳无冲击,可实现安装就位准确,能满足不同工况的需要;软启动、软停止的功能降低了机械传动冲击,明显改善钢结构的承载性能,延长了塔机和传动件使用寿命;易维护;具有完善的自我保护功能,可对电动机实行过流和过热保护;能够实现“轻载快速,重载慢速”的作业要求;具有自动节能操作模式,能较大提高整机工作效率,节能效果显著。
探究塔式起重机调速技术电机是塔式起重机的众多部件中十分重要的部件,电气性能和可靠性又是塔机性能的重要组成部分。
起重机电气传动的众多要求中,调速是最为重要的,良好的调速性可以使得起动及制动较为平稳、停车准确、运行稳定可靠、变速迅速。
1.传统起重机调速技术(1)转子串电阻调速:将附加电阻串入绕线式异步电动机的转子中,增大电动机的转差率,从而可保证电动机转速较低。
一般,电动机的转速与串入的电阻大小成反比,串入电阻越大,电动机转速越小。
这种方法虽然设备简单,控制方便,但不可避免也有其不足之处。
由于转差功率以发热的形式消耗在电阻上,机械特性较软,属有级调速。
(2)定子调压调速:控制速度可通过改变定子电压来改变电动机的转矩,一般来说,电机转矩与定子电压的平方成正比。
这种方法具有简单和调速平滑的优点,并且,在采用闭环控制时还能达到理想的精度。
不足之处为其具有较窄的调速范,电动机转子在工作过程中具有较大的损耗。
(3)串级调速:将可调节的附加电势串入绕线式电动机的转子回路中,用来改变电动机的转差,这种调速的方法成为串级调速。
该方法操作起来较为简单方便,且它是不平滑的有级调速,功率因数较低,调速效率较高。
不足之处是电气制动不够理想。
在传统起重机的调速方式中,往往存在如下问题:①调速系统的调速效率较低,具有较差的综合性能指标。
②绕线转子异步电动机中存在较易引起故障的集电环和电刷,因而要定期对其进行维护。
③由于现场需要使用大量的继电器以及接触器,致使需要较大的维护量,并且调速系统的故障率较高。
2.调节电机转速的参数为保持调速过程中平缓无冲击,提高作业效率以及保证工作安全,要求塔机的工作机构具有适当的调速性能,如起升的机构不仅需要重载慢就位的速度,同时也要有轻载快的速度。
通过下列三种参数的调节,可以达到调节异步电机转速的目的。
(1)改变定子绕组的极对数改变定子绕组的极对数进而调节速度的方法属于有級调速。
它通常是通过改变定子绕组联结法,从而使得对数成倍地变化,这样,也就能成倍地改变同步转速,达到调速的目的。
浅析塔式起重机电机的调速方法摘要:电机是塔式起重机的众多部件中十分重要的部件,大部分是三相异步绕线式电动机,电气性能和可靠性又是塔机性能的重要组成部分。
起重机电气传动的众多要求中,调速是最为重要的,良好的调速性可以使得起动及制动较为平稳、停车准确、运行稳定可靠、变速迅速。
关键词:电机;调速;方法Abstract: The motor is very important in many parts of the tower crane parts, most of the three-phase asynchronous wound motor, electrical performance and reliability is an important part of the tower crane performance. The many requirements of the crane electrical transmission, the governor is the most important, the governor can make starting and braking more stable and accurate parking, stable and reliable, variable speed quickly.Key ords: motor; the speed; method内蒙电建一公司做为有着58年历史的企业,发展至今共有大型机械30余台次,绝大部分电气控制系统均采用变频调速和串级调速。
电机是塔式起重机的众多部件中十分重要的部件,大部分是三相异步绕线式电动机,电气性能和可靠性又是塔机性能的重要组成部分。
起重机电气传动的众多要求中,调速是最为重要的,良好的调速性可以使得起动及制动较为平稳、停车准确、运行稳定可靠、变速迅速。
下面我来谈谈起重机的几种调速方式:1.传统起重机调速技术1.1转子电路串联电阻调速的调速电机1.1.1绕线式电机在转子电路中串接变阻器,增加转子电阻,使转子电流减少,转矩也随之下降。
塔式起重机起升机构调速控制电路的改进摘要:本文以塔式起重机为研究主体,将其起升机构调速控制电路进行了细化研究,首先将当前其中机构调速控制电路中存在的问题进行了说明,其次针对问题提出了相应的解决方案,并将此方案的工作原理进行了解说,最后将改进后的电路使用效果进行了判定。
关键词:塔式起重机;起升机构;调速控制电路引言:当前,我国的运输事业以及建筑事业日益发展,对于塔式起重机的使用也越来越普遍,基于塔式起重机对构件的运送与安装能力,一旦其出现质量问题就会造成较为严重的安全事故,因此,针对其重要组成部位的起升机构要进行质量管控,进行调速控制电路的改进则是主要手段。
1.塔式起重机起升机构调速控制电路存在的问题1.1电路结构本文以当前常见的8t塔式起重机起升机构调速控制电路来进行研究,此电路系统由八大部分组成,分别是可编程控制器、档位开关、涡流控制接触器、涡流线圈、电阻、二极管、整流桥、断路器。
其中,档位开关由六部分组成,涡流控制接触器由三部分组成,电阻由三部分组成,与涡流控制接触器一一对应。
档位开关中的第一档为正转开关,第二档为反转开关,六档开关经由可编程控制器的输入端口与其进行连接,而可编程控制器的输出端口与涡流控制接触器相接。
上述结构为可编程控制器的电路结构,此外,还包含电动机涡流回路结构,在此电路结构中,电阻与二极管共同组合成续流回路,且此续流回路与涡流线圈处于并联状态,涡流控制接触器触点与对应电阻相接,形成控制涡流的续流回路,整流桥存在于一档涡流控制接触器与二三档涡流控制接触器之间,将交流电进行直流电的转换,在一档涡流控制接触器之下设立断路器,在电动机发生电路故障时进行电路切断,以此保障起升机构的安全性[1]。
1.2工作缺陷此种调速控制电路存在一定的弊端与缺陷,即在出现故障,断路器基于保护性能闭合后,正转档位开关与反转档位开关同时闭合,这时的三部分涡流控制接触器会吸合,涡流线圈通过接触器触点的电流继续运转,涡流处于最大值,电动机处于最低转速,此时电动机的运行状态较为正常。
《工业控制计算机》2020年第33卷第8期塔式起重机是(简称塔机)起源于西欧,主要在房屋建筑施工场所将物料垂直和水平运送到大臂工作的圆形范围内建筑工地对应的位置,运行速度快,作业效率高,工作强度大,对减轻工人劳动强度、减少建筑成本、提升施工质量等起到积极的作用。
近年来,随着我国经济的快速发展,综合国力的不断提高,给塔机的生产制造带来了前所未有的蓬勃生机。
通常塔机工作环境恶劣,频繁的启动操作容易对结构振动造成冲击、疲劳开裂,降低电机寿命甚至引起设备损坏,容易引起安全事故,因此合理设计塔机的传动机构及调速系统,实现系统的平稳启动和制动对提高整机的安全起着至关重要的作用。
塔机运动控制系统中包含起升结构、变幅机构及回转机构,各机构的调速系统独立运行。
起升机构是其中最重要的、运动系统最复杂的机构。
起升机构是恒转矩负载,当重物上升时,电机处于电动状态,电磁转矩要克服重物的重力及系统中存在的摩擦力而做功;重物下降时,如果下放的重物为重载,电机处于制动状态,也就是说此时磁转矩及摩擦力小于下放重物的重力,电机处于发电状态,而当负载为轻载或空载时候,电机仍处于电动状态。
这对变频逆变器提出了更高的要求,因此起升机构调速控制机构也更复杂,调速范围广而需要更好的调速系统来适应工况。
1变频调速方式随着塔机不断发展其调速系统也在不断发展,塔机驱动所用电机前期以直流为主,到现在直流和和交流电机混合存在。
直流调速主要以改变电枢回路中的电阻、改变电枢供电电压、改变励磁磁通及电枢回路电阻实现调速,但直流电机换向器及电刷维护困难、寿命短。
交流电机以结构简单制造成本低、坚固耐用,运行可靠、维护方便获得越来越多的应用。
随着电力电子变换器的发展,高效的交流变频调速系统逐渐进入到塔机的控制系统中。
而交流调速系统主要有变压变频、改变电机极对数、改变电机变转差率调速。
变频调速具有较完美的机械特性,其良好的起制动性能实现了塔机起升机构吊钩的快速、准确定位,从而提高了作业效率,使控制系统大为简化,可靠性得到很大提高。