电力拖动讲义系统动力学
- 格式:ppt
- 大小:1.01 MB
- 文档页数:4

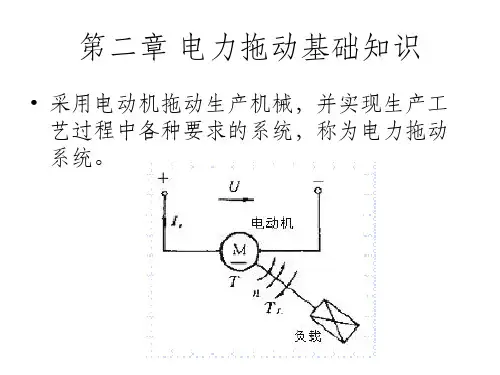
第八章 电力拖动系统的动力学基础(Dynamics basis of e-power dragging system)电机拖动系统是用电动机来拖动机械运行的系统。
包括:电动机、传动机构、生产机械、控制设备和电源五个部分。
它们之间的关系如下本章主要介绍电力拖动系统的运动方程、负载转矩特性。
8.1电力拖动系统的运动方程式(kinematics equation)一.运动方程式电力拖动系统运动方程式描述了系统的运动状态,系统的运动状态取决于作用在原动机转轴上的各种转矩。
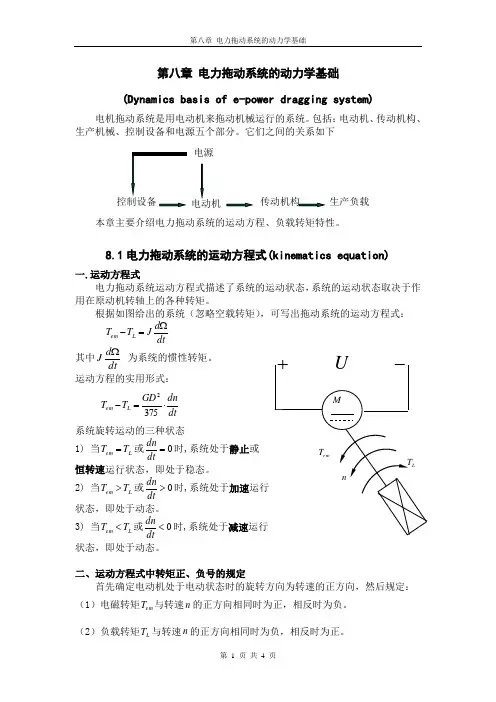
根据如图给出的系统(忽略空载转矩),可写出拖动系统的运动方程式:dtd J T T L em Ω=- 其中dtd J Ω 为系统的惯性转矩。
运动方程的实用形式: dt dn GD T T L em ⋅=-3752 系统旋转运动的三种状态1) 当L em T T =或0=dt dn 时,系统处于静止或 恒转速运行状态,即处于稳态。
2) 当L em T T >或0>dtdn 时,系统处于加速运行状态,即处于动态。
3) 当L em T T <或0<dtdn 时,系统处于减速运行状态,即处于动态。
二、运动方程式中转矩正、负号的规定首先确定电动机处于电动状态时的旋转方向为转速的正方向,然后规定:(1)电磁转矩em T 与转速n 的正方向相同时为正,相反时为负。
(2)负载转矩L T 与转速n 的正方向相同时为负,相反时为正。
传动机构 生产负载控制设备电源(3)惯性转矩dtdn GD ⋅3752的大小和正负号由em T 和L T 的代数和决定。
三、各种形状旋转体转动惯量的计算1.分两种情况1)旋转轴通过该物体重心;2)旋转轴不通过该物体重心;2.几种常见旋转物体转动惯量的计算1)小球; 2)圆环体;3)圆柱体; 4)长方体(过重心)5)长方体(不过重心); 6)圆锥体;7)圆柱体(圆杆,过重心) 8)圆柱体(圆杆,不过重心)8.2工作机构转矩、力、飞轮力矩和质量的折算(conversion)实际拖动系统为多轴系统,分析较为复杂——简化——引入折算概念——等效为单轴系统。
第八章电力拖动系统动力学基础内容提要研究电力拖动系统动力学的目的是为介绍电力花动的机械特性与过渡过程等内容准备必要的理论基拙。
第一节及第二节分析运动方程式,对方程式中各参数(力、转拒、质量和飞轮惯量等)的折算方法进行分析研究;第三节介绍了电动机和工作机构!'}速比可变系统的有关问题;第四节中讨论考虑传动机构损耗的简化折算方法与较准确的折其方法;最后,在第五节中将介绍几种典型生产机械的负载转矩特性。
第一节电力拖动系统的运动方程式“拖动”就是应用各种原动机使生产机械产生运动,以完成一定的生产任务。
而用各种电动机作为原动机的拖动方式称为“电力拖动”。
一般情况下,电力拖动装置可分为电动机、工作机构、控制设备及电源四个组成部分,如图8-1所示。
电动机把电能转换成机械动力,用以拖动生产机械的某一工作机构。
工作机构是生产机械为执行某一任务的机械部分。
控制设备是由各种控制电机、电器、自动化元件及工业控制计算机等组成的,用以控制电动机的运动,从而对工作机构的运动实现自动控制。
为了向电动机及一些电气控制设备供电,在电力拖动系统中必须设有电源部分。
需要指出的是,在许多情况下,电动机与工作机构并不同轴,而是在二者之间有传动机构,它把电动机的运动经过中间变速或变换运动方式后再传给生产机械的工作机构。
下面研究电力拖动系统中电动机带动负载的力学问题。
一、运动方程式电动机在电力拖动系统中作直线运动(如直线电动机)或旋转运动时,由力学定律可知,必须遵循下列两个基本的运动方程式:对于直线运动,方程式为式中F—拖动力(N);—阻力(N);惯性力如果质量m的单位为kg,速度v的单位为m/s,时间t的单位为S,则惯性力的单位F .相同,为N。
与直线运动时相似,旋转运动的方程式为式中 T 电动机产生的拖动转矩T 阻转矩(或称负载转矩)d 惯性转矩(或称加速转矩)。
转动惯量J 可用下式表示:kg·m 2 式中m 与G 旋转部分的质量(kg)与重量(N);ρ与D 惯性半径与惯性直径(m};g 重力加速度,g=9. 81 m/s这样,由式(8-3)可见,转动惯量J 的单位为kg·m 2运动方程式(8一2)的形式不够实用,在实际计算中常把它化为另一种形式。