电力拖动系统的动力学基础
- 格式:doc
- 大小:3.42 MB
- 文档页数:25
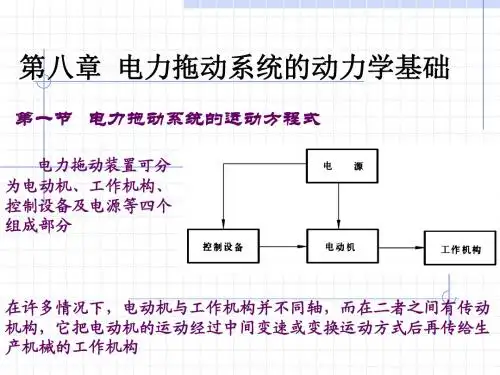
第八章 电力拖动系统的动力学基础(Dynamics basis of e-power dragging system)电机拖动系统是用电动机来拖动机械运行的系统。
包括:电动机、传动机构、生产机械、控制设备和电源五个部分。
它们之间的关系如下本章主要介绍电力拖动系统的运动方程、负载转矩特性。
8.1电力拖动系统的运动方程式(kinematics equation)一.运动方程式电力拖动系统运动方程式描述了系统的运动状态,系统的运动状态取决于作用在原动机转轴上的各种转矩。
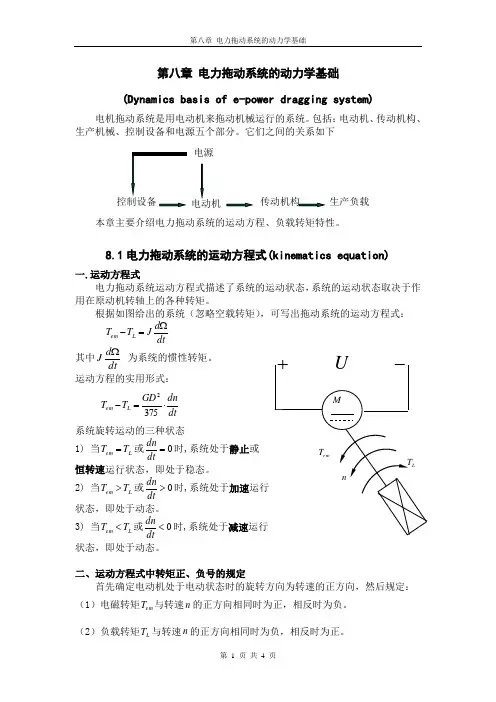
根据如图给出的系统(忽略空载转矩),可写出拖动系统的运动方程式:dtd J T T L em Ω=- 其中dtd J Ω 为系统的惯性转矩。
运动方程的实用形式: dt dn GD T T L em ⋅=-3752 系统旋转运动的三种状态1) 当L em T T =或0=dt dn 时,系统处于静止或 恒转速运行状态,即处于稳态。
2) 当L em T T >或0>dtdn 时,系统处于加速运行状态,即处于动态。
3) 当L em T T <或0<dtdn 时,系统处于减速运行状态,即处于动态。
二、运动方程式中转矩正、负号的规定首先确定电动机处于电动状态时的旋转方向为转速的正方向,然后规定:(1)电磁转矩em T 与转速n 的正方向相同时为正,相反时为负。
(2)负载转矩L T 与转速n 的正方向相同时为负,相反时为正。
传动机构 生产负载控制设备电源(3)惯性转矩dtdn GD ⋅3752的大小和正负号由em T 和L T 的代数和决定。
三、各种形状旋转体转动惯量的计算1.分两种情况1)旋转轴通过该物体重心;2)旋转轴不通过该物体重心;2.几种常见旋转物体转动惯量的计算1)小球; 2)圆环体;3)圆柱体; 4)长方体(过重心)5)长方体(不过重心); 6)圆锥体;7)圆柱体(圆杆,过重心) 8)圆柱体(圆杆,不过重心)8.2工作机构转矩、力、飞轮力矩和质量的折算(conversion)实际拖动系统为多轴系统,分析较为复杂——简化——引入折算概念——等效为单轴系统。
第一章电力拖动系统的动力学基础本章要求了解有关电力拖动的基本概念;掌握单轴拖动系统的运动方程;重点掌握多轴系统等效为单轴系统后等效的系统负载和系统转动惯量的计算。
本章重点多轴系统向单轴系统的等效折算。
本章简述在电力拖动系统中,为了得到系统中电机和负载的运动和工作情况,需要通过求解动力学方程和利用电机学中的电机方程得到。
然而动力方程只能适用单轴系统,而实际中大多是多轴拖动系统,因此必须将多轴系统通过等效变换为合适的单轴系统来求解。
这就要掌握等效变换的原则和方法。
本章学时2学时第一节单轴电力拖动系统的运动方程式本节学时0.5学时本节重点1、单轴拖动系统运动方程2、转动惯量的单位制转换教学方法结合理论,推导出单轴拖动系统运动的计算公式,掌握其中的单位制变换,以及方程的求解。
教学手段以传统教学手段与电子课件相结合的手段,让学生在有限的时间内掌握更多的相关知识。
教学内容:一、单轴电力拖动系统的运动方程式在图1-1(a)所示电力拖动系统中,作用在该轴上的转矩有电动机的电磁转矩T、电动机的空载转矩T0及生产机械的负载转矩Tm,T+Tm=TL。
TL为电动机的负载转矩,轴的旋转角速度为 。
电动机转子的转动惯量为JR ,生产机械转动部分的转动惯量为Jm。
联轴器的转动惯量比JR 及Jm小很多,可忽略,因此单轴拖动系统对转轴的总转动惯量为J=JR +Jm。
图1-1(b)给出了各物理量的参考正方向。
假定两轴之间为刚性连接,并忽略轴的弹性变形,那么图1-1所示的单轴拖动系统可以看成刚体绕固定轴转动。
根据力学中(a ) 单轴电力拖动系统 (b ) 各量的参考方向图 1-1 单轴电力拖动系统及各量的参考方向刚体转动定律及各量的参考正方向,可写出如下的转动方程式T-T L =Jdt d Ω(1-1) 式中:T —电动机的电磁转矩(N ·m )T L ——电动机的负载转矩(N ·m ),J —电动机轴上的总转动惯量(㎏·㎡), Ω —电动机的角速度(rad/s )式(1-1)称为单轴电力拖动系统的运动方程式,它描述了作用于单轴拖动系统的转矩与速度变化之间的关系,是研究电力拖动系统各种运转状态的基础。
第2章电力拖动系统的动力学基础2.1概述在生产实践中广泛采用电动机作为原动机拖动生产机械运转,以完成一定的生产任务。
这种以电动机作为原动机拖动生产机械运动的拖动方式称为“电力拖动”。
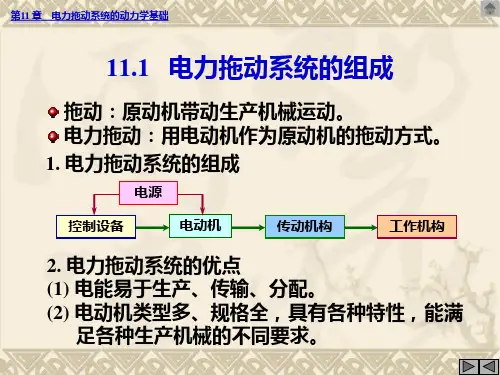
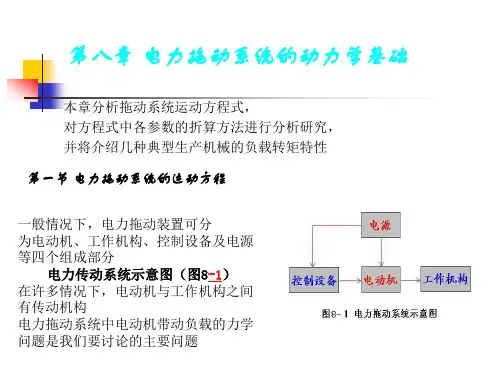
一般情况下,电力拖动系统是由电动机、控制设备、传动机构、电源及工作机构等五个组成部分,如图2-1所示。
电动机作为原动机,通过传动机构拖动生产机械完成某一生产任务。
传动机构主要用于电动机和生产机械之间传递功率和转矩,变换运动速度及形式。
控制设备是由各种控制电器、工业控制计算机、可编程控制器等组成,用以控制电动机的运行,从而对工作机构的运动实现自动控制。
电源部分向电动机及一些电气控制设备供电。
图2-1电力拖动系统示意图在研究电力拖动系统的运动规律时,一般情况下不考虑电力拖动系统中所用的电动机的种类以及生产机械的性质,而是把电动机、传动机构和生产机械看作是一个运动着的整体进行分析、研究,找出它们所遵循的统一的运动规律,建立电力拖动系统的运动方程。
2.2电力拖动系统的运动方程式2.2.1单轴拖动系统的运动方程式所谓单轴拖动系统是指电动机输出轴直接拖动生产机械运转的系统。
此时电动机、传动机构、机械负载等所有的运动部件均以同一转速运动。
这种单轴拖动系统是电力拖动系统中最基本的一种。
它是研究复杂电力拖动系统的基础。
单轴拖动系统又分为两种形式,一种形式是单轴旋转拖动系统,另一种形式是单轴直线运动的拖动系统。
下面分别研究这两种简单电力拖动系统的运动方程式。
1. 单轴直线运动拖动系统的运动方程式根据牛顿第二定律,在电力拖动系统中如果生产机械做直线运动,作用在电动机轴上的电动力F 与阻力L F 以及速度变化时产生的惯性力ma 之间的关系遵循下列基本运动方程式。
ma F F L =-式中,F —拖动力,单位为N ;L F —阻力,单位为N ;m —物体的质量,单位为kg ;a —物体的加速度,单位为2/s m ;上式也可写成 dt dv mF F L =- (2-1) 式中,dtdv m 是惯性力,如果质量m 的单位为kg ,速度v 的单位为s m /,时间t 的单位为s ,则惯性力的单位与F 及L F 的单位相同,为N 。
2. 单轴旋转拖动系统的运动方程式1)转动惯量与飞轮矩转动的物体与直线运动的物体一样,具有保持运动状态的性质,即惯性。
在直线运动中表示惯性大小的量是质量;在旋转中,表示惯性大小的量叫做转动惯量,常用字母J 表示。
同一物体即可以作直线运动,也可以转动,所以转动惯量与质量是直接相关的。
质量大的物体在转动时,其转动惯量大;同时,转动惯量的大小显然还与物体距转轴轴心的距离有关。
举个例子来分析一下:在绳子的一端栓一个钢球,用手抓住绳子,甩动钢球,如图2-2所示。
图2-2 圆周运动的转动惯量图2-2圆周运动的转动惯量如果钢球转动时沿切线方向的力是F ,钢球质量是m ,沿切线方向的线速度是v ,加速度是dtdv a =,根据直线运动定律有 ma F =(2-2)式中,F —沿切线方向的力,单位为N ;m —钢球质量,单位为kg ;a —加速度,单位2/s m 。
设物体在时间t 内转过的角位移是θ,走过的圆弧是s ,则线速度v 为ωθr t r t sv === (2-3)式中 ω—为转动的角速度,单位为s rad /。
如角加速度为α,则有 dt d ωα=(2-4) 由式(2-3)、式(2-4)可得r adt dvr ==1α(2-5) 故αα2mr r mr mar Fr T ==== (2-6) 式中 T 是产生角加速度的转矩。
与直线运动定律ma F =相比,转动的运动定律应该是JaT = (2-7)因此转动惯量为2mr J = (2-8)为了方便起见,常把转动惯量的公式写成 2ρm J = (2-9)式中ρ是物体对转轴的惯性半径(回转半径)。
旋转物体的形状不同或旋转轴心的位置不同,则物体对转轴的惯性半径也不同。
有时采用惯性直径D 代替物体对转轴的惯性半径ρ,应有2D =ρ,故有 22412mD D m J =⎪⎭⎫ ⎝⎛= (2-10) 因旋转物体的质量m 与所受的重力有如下关系,即mgG =(2-11)由此得出 gGD J 42= (2-12) 或Jg GD 42= (2-13)式中,2GD —是一个物理量,叫做飞轮矩或飞轮惯量,单位为2Nm ; m 与G — 旋转体的质量(kg )与重量(N );ρ与D —系统转动部分的回转半径与直径(m ); g = 9.81m/s 2 —重力加速度。
电力拖动系统中常用2GD 表示旋转部件的惯性。
电动机及生产机械各旋转部分的飞轮矩可在相应的产品目录中查到。
必须指出的是,不要误认为2GD 是重力乘以直径的平方,因为2GD 中的D 是惯性直径,不是物体的实际直径。
由此可见,形状不同的旋转物体,即使质量相同,转动惯量也不一样,质量的分布离转轴越远,转动惯量越大。
下面给出各种不同旋转体的转动惯量的计算方法:表2-1简单形状均质体的转动惯量2)单轴旋转拖动系统的运动方程式在各种结构形式的电力拖动系统中,电动机轴与生产机械的旋转机构直接相连的单轴系统是最基本的一种。
与单轴直线运动的拖动系统相似,作用在电动机轴上的拖动转矩为T ,生产机械的阻转矩为L T ,则单轴旋转运动拖动系统的基本运动方程式为dtd J T T L Ω=- (2-14) 式中, T — 电动机产生的拖动转矩,单位为Nm ;L T — 阻转矩(或称负载转矩),单位为Nm ;Ω — 为电动机的角速度,单位为s rad /;dtd Ω— 角加速度,单位为2/s rad ; J — 为电动机轴上的转动惯量,单位为2kgm 。
上面的微分方程式就是描述单轴旋转拖动系统运动规律的运动方程式,是研究电力拖动系统各种运动状态的基础。
在工程计算中,通常用速度n 代替角速度Ω;用飞轮力矩2GD 代替转动惯量J 。
n 与Ω的关系为602n π=Ω,J 与2GD 之间的关系为g GD J 42=。
即可得到单轴旋转拖动系统运动方程的实用形式dtdn GD T T L 3752=- (2-15) 式中375是具有加速度量纲的系数。
其值为π2604⨯g ,单位为min)/(s m 。
3)运动方程式中正负号的规定在电力拖动系统中,随着生产机械负载类型的不同,电动机的运行状态将发生变化,电动机轴上的拖动转矩T 及生产机械的阻转矩L T 不仅大小会发生变化,方向也发生变化。
因此,单轴旋转拖动系统运动方程式可写成下列一般形式: dtdn GD T T L 375)(2=±-± (2-16) 对公式(2-16)中T 与L T 前带有的正负符号,作如下规定:预先规定某一旋转方向为正方向,则(1)拖动转矩T 方向如果与所规定的旋转正方向相同,T 前取正号,相反时取负号;(2)阻转矩L T 方向如果与所规定的旋转正方向相同时,L T 前取负号,相反时取正号;(3)加速转矩dtdn GD 3752的大小及正负符号,由拖动转矩T 及阻转矩L T 的代数和来决定。
4)拖动系统的运动状态分析2-15式可知,一个电力拖动系统的运动状态,可以从运动方程来判定。
(1) 当L T T =时,0/=dt dn ,则0=n 或=n 常数,表示电力拖动系统处于静止不动或以恒定转速旋转的状态。
(2) 当L T T >时,0./>dt dn ,电力拖动系统处于加速状态。
(3)当L T T <时,0/<dt dn ,电力拖动系统处于减速状态。
由此可知,当L T T =时,系统处于稳定运行状态;当L T T ≠,系统处于加速或减速状态,我们把这种运动状态称为动态或过渡状态。
2.2.2多轴旋转拖动系统的折算前面我们讨论的是单轴电力拖动系统的问题,而实际的生产机械大多数都是多轴拖动系统,如图2-8(a )所示。
多轴拖动系统电动机的输出轴不是直接拖动生产机械运转,而是通过传动机构与生产机械相连,因此对于多轴电力拖动系统,不同的轴具有各自不同的转动惯量和转速。
研究多轴电力拖动系统的力学问题有两种方法,一种对拖动系统的每根轴分别列出相应的运动方程式,再列出各轴间互相联系的方程式,联立求解,这种解法因方程较多、计算量大,比较繁琐。
另一种方法采用折算的方法,把复杂的多轴拖动系统(如图2-3(a )所示),等效为一个简单的单轴拖动系统(如图2-3(b )所示),然后再按上节得出的结果分析系统的运行情况。
等效折算的原则是保持两个系统传送的功率及储存的动能相同。
下面我们将根据这个原则来介绍具体的折算方法。
以电动机轴为研究对象,需要折算的参量为:工作机构负载转矩m T 、系统中各轴(除电动机轴外)的转动惯量1J 、2J 、3J ...及工作机构的转动惯量m J 。
图2-3电力拖动系统示意图(a )传动图;(b )等效折算图1. 转矩的折算如图2-3(a )及2-3(b )所示,已知生产机械的工作机构的阻转矩为m T 角速度为mΩ,折算成单轴旋转系统的等值转矩为L T ,电动机的角速度为Ω。
传动效率为t η,根据传送功率不变的等效原则,折算成单轴旋转系统后的负载功率为实际的负载功率与传动损耗功率之和,应有如下的关系t m m L T T ηΩ=Ω 等效负载转矩为 jT T T t m m t mL ηη=⎪⎪⎭⎫ ⎝⎛ΩΩ= (2-17) 如果传动机构为齿轮,则转速比为2121z z n n j ==(2-18) 式中,1z 、2z 为齿轮的齿数,齿轮传动机构转速与齿数成反比。
如果传动机构为皮带,则转速比为1221D D n n j == (2-19) 式中1D 、2D 为皮带轮的直径,皮带轮传动机构转速与皮带轮的直径成反比。
如果传动机构为蜗轮蜗杆,则转速比为1221z z n n j ==(2-20) 式中,1z 为蜗杆的头数,2z 为齿轮的齿数。
在多级传动系统中,如各级效率为 1c η、2c η、 3c η则传动机构总效率c η应为各级效率的乘积321c c c c ηηηη⋅⋅= (2-21)不同类型的传动机构每级效率以及转速比可从机械工程手册中查到。
2.等效转动惯量的折算为了使复杂的多轴运动系统简化为等效的单轴系统,在运用式(2-15)运动方程式分析问题时,不仅对负载转矩进行折算,而且对转动惯量、飞轮矩也要进行折算,等效折算的原则应保持实际系统与等效系统储存的动能相等,系统的惯性作用不因折算而有所改变。
在类似图2-3(a )所示的多轴系统中,已知电动机和工作机构之间共有n 根轴,各轴的转动惯量为R J 、1J 、2J …及工作机构的转动惯量m J ,折算成单轴旋转系统的等效的转动惯量为J ,电动机轴及其它各轴的角速度为Ω、1Ω、2Ω、...、m Ω,根据等效折算原则,得出下列关系:()()222122122112222221122222211222222112222221122212121212121j J j j j J j j J j J J n n J n n J n n J n n J J J J J J J J J J J J J J J J J J J m n n R m m n n R m m n n R m m n n R m m n n R +++++=⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛++⎪⎭⎫ ⎝⎛+⎪⎭⎫ ⎝⎛+=⎪⎭⎫ ⎝⎛ΩΩ+⎪⎭⎫ ⎝⎛ΩΩ++⎪⎭⎫ ⎝⎛ΩΩ+⎪⎭⎫ ⎝⎛ΩΩ+=⎪⎪⎭⎫ ⎝⎛ΩΩ+⎪⎪⎭⎫ ⎝⎛ΩΩ++⎪⎪⎭⎫ ⎝⎛ΩΩ+⎪⎪⎭⎫ ⎝⎛ΩΩ+=Ω+Ω++Ω+Ω+Ω=Ω (2-22)将上式中求有的J 用相应的2GD 代替,得到飞轮矩的折算公式。