鲁棒控制课件
- 格式:ppt
- 大小:406.00 KB
- 文档页数:14


第一章概述§1.1 不确定系统和鲁棒控制(Uncertain System and Robust Control)1.1.1 名义系统和实际系统(nominal system)控制系统设计过程中,常常要先获得被控制对象的数学模型。
在建立数学模型的过程中,往往要忽略许多因素:比如对同步轨道卫星的姿态进行控制时不考虑轨道运动的影响,对一个振动系统的控制过程中,不考虑高阶模态的影响,等等。
这样处理后得到的数学模型仍嫌太复杂,于是要经过降阶处理,有时还要把非线性环节进行线性化处理,时变参数进行定常化处理,最后得到一个适合控制系统设计使用的数学模型。
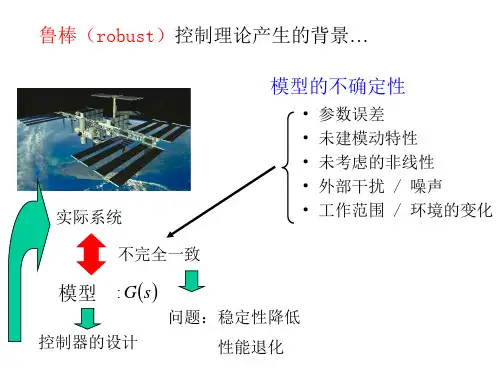
经过以上处理后得到的数学模型已经不能完全描述原来的物理系统,而仅仅是原系统的一种近似,因此称这样的数学模型为“名义系统”,而称真实的物理系统为“实际系统”,而名义系统与实际系统的差别称为模型误差。
1.1.2不确定性和摄动(Uncertainty and Perturbation)如立足于名义系统,可认为名义系统经摄动后,变成实际系统,这时模型误差可视为对名义系统的摄动。
如果立足于实际系统,那么可视实际系统由两部分组成:即已知的模型和未知的模型(模型误差),如果模型的未知部分并非完全不知道,而是不确切地知道,比如只知道某种形式的界限(如:范数或模界限等),则称这部分模型为实际模型的不确定部分,也说实际系统中存在着不确定性,称含有不确定部分的系统为不确定系统。
模型不确定性包括:参数、结构及干扰不确定性等。
1.1.3 不确定系统的控制经典的控制系统设计方法要求有一个确定的数学模型(可能是常规的,也可能是统计的)。
以往,由于对一般的控制系统要求不太高,所以系统中普遍存在的不确定性问题往往被忽略。
事实上,对许多要求不高的系统,在名义系统的基础上进行分析与设计已经能够满足工程要求,而对一些精度和可靠性要求较高的系统,也只是在名义系统基础上进行分析和设计,然后考虑模型的误差,用仿真的方法来检验实际系统的性能(如稳定性、暂态性能等)。