鲁棒控制理论简介 ppt课件
- 格式:ppt
- 大小:1.69 MB
- 文档页数:11

鲁棒控制理论基础章1. 引言鲁棒控制是指当系统受到外界干扰时,仍能保持一定稳定性的控制方法。
鲁棒控制方法的出现,是为了解决传统控制方法在系统故障和外界干扰下容易失效的问题。
鲁棒控制理论也因此应运而生。
本章将介绍鲁棒控制理论的基础知识,包括鲁棒性概念、鲁棒控制设计指标及鲁棒控制设计方法。
2. 鲁棒性概念2.1 鲁棒性定义鲁棒性是指控制系统能够在一定程度上抵抗外界干扰、模型不确定性和参数扰动等不利因素的性能。
在控制系统中,外部干扰是不可避免的,特别是在现代控制领域中,系统模型和控制器参数的不确定性也是普遍存在的。
因此,了解和掌握鲁棒性理论对于控制系统稳定性的提高和鲁棒性能的设计至关重要。
2.2 鲁棒性评价指标鲁棒性评价指标通常采用灵敏度函数和鲁棒稳定裕度等指标来评估系统的鲁棒性能。
其中,灵敏度函数是指系统输出间的变化与系统输入间的变化之间的关系,鲁棒稳定裕度则是指系统在一定范围内满足稳定性要求的能力。
2.3 鲁棒性的分类鲁棒性可分为参数鲁棒性和结构鲁棒性两种。
参数鲁棒性是指系统在参数变化时对系统鲁棒性的影响,即当有一个扰动作用到系统参数上时,系统是否能够维持一定的稳定性。
结构鲁棒性是指系统在模型不精确或者模型存在未知扰动时,仍能够保证鲁棒稳定性。
3. 鲁棒控制设计指标3.1 灵敏度函数在鲁棒控制设计中,灵敏度函数是一个重要的工具,其可以用来评估系统的稳定性。
针对灵敏度函数,可以设计出控制器,通过控制器来提高系统的稳定性。
3.2 鲁棒稳定裕度鲁棒稳定裕度是衡量鲁棒控制系统对于系统变化的一种指标。
通过定义不同的鲁棒稳定裕度,可以使得鲁棒控制系统更加健壮。
3.3 状态观测器状态观测器可以更加准确地预估系统的状态,提供更加精确的控制信号。
在鲁棒控制系统中,设计一个稳健的状态观测器可以提高系统的稳定性。
4. 鲁棒控制设计方法4.1 H∞控制H∞控制是一种经典的鲁棒控制方法,其通过最小化灵敏度函数,使得系统具有一定稳定性。

当今的自动控制技术都是基于反馈的思想。
反馈理论的要素包括三个部分:测量、比较和执行。
测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。
这个理论应用于自动控制的关键是,做出正确的测量和比较后,如何利用误差才能更好地纠正系统(即控制器的设计)。
鲁棒控制(Robust Control)方面的研究始于20世纪50年代。
在过去的20年中,鲁棒控制一直是国际自控界的研究热点。
所谓“鲁棒性”,是指控制系统在一定(结构,大小)的参数摄动下,维持某些性能的特性。
根据对性能的不同定义,可分为稳定鲁棒性和性能鲁棒性。
以闭环系统的鲁棒性作为目标设计得到的固定控制器称为鲁棒控制器。
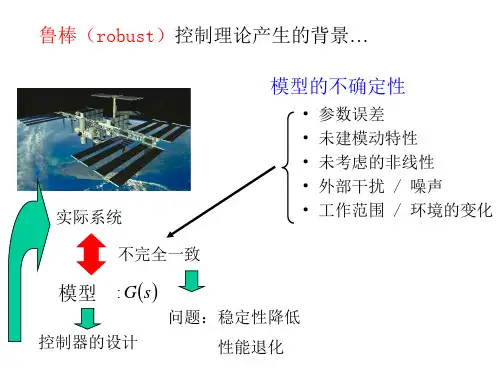
由于工作状况变动、外部干扰以及建模误差的缘故,实际工业过程的精确模型很难得到,而系统的各种故障也将导致模型的不确定性,因此可以说模型的不确定性在控制系统中广泛存在。
如何设计一个固定的控制器,使具有不确定性的对象满足控制品质,也就是鲁棒控制,成为国内外科研人员的研究课题。
主要的鲁棒控制理论有:(1)Kharitonov区间理论;(2)H∞控制理论(IMPORTANT);(3)结构奇异值理论(μ理论)等等。
H∞控制理论H∞控制理论是20世纪80年代开始兴起的一门新的现代控制理论。
H∞控制理论是为了改变近代控制理论过于数学化的倾向以适应工程实际的需要而诞生的,其设计思想的真髓是对系统的频域特性进行整形(Loopshaping),而这种通过调整系统频率域特性来获得预期特性的方法,正是工程技术人员所熟悉的技术手段,也是经典控制理论的根本。
1981年Zames首次用明确的数学语言描述了H∞优化控制理论,他提出用传递函数阵的H∞范数来记述优化指标。
1984年加拿大学者Fracis和Zames用古典的函数插值理论提出了H∞设计问题的最初解法,同时基于算子理论等现代数学工具,这种解法很快被推广到一般的多变量系统,而英国学者Glover则将H∞设计问题归纳为函数逼近问题,并用Hankel算子理论给出这个问题的解析解。