电动葫芦电气控制原理ppt课件
- 格式:ppt
- 大小:872.00 KB
- 文档页数:17
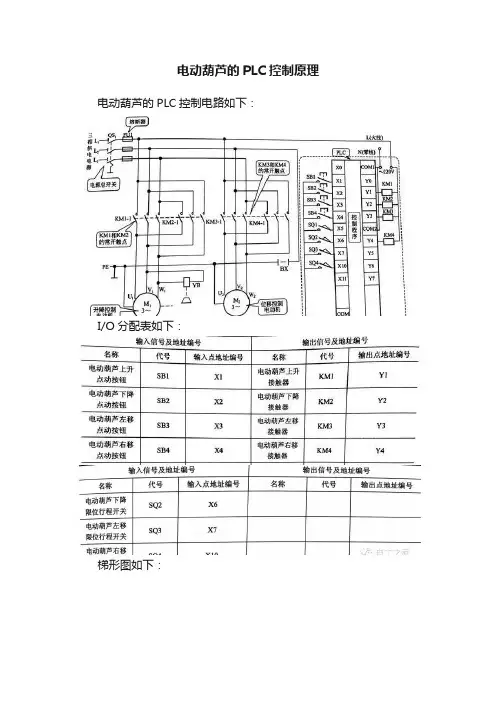
电动葫芦的PLC控制原理电动葫芦的PLC控制电路如下:
I/O分配表如下:
梯形图如下:
电动葫芦的上升过程为:
当按下上升点动控制按钮SB1时(步骤1),其将PLC内的×1置1,即该触点接通(步骤2),使得Y1得电(步骤3),控制PLC外接交流接触器线圈KM得电,同时其常闭触点×1置0,即该触点断开防Y2(KM2)得电,Y1得电,常闭触点Y1断开,Y2(KM2)互锁(步骤4)。
主电路中的主触点KM1-1闭合,接通电动机电源,升降控制电动机启动开始上升运转(步骤5)。
当电动机上升到限位开关SQ1设定位置时,限位行程开关SQ1动作,将PLC内×5置0,即触点断开,Y1失电,接触器KM1线圈失电复位,主触点复位断开,电动机停止上升(步骤6)。
电动葫芦的下降过程为:
当按下下降点动控制按钮SB2时(步骤7),其将PLC内的×2置1,即该触点接通(步骤8),使得Y2得电(步骤9),控制PLC外接交流接触器线圈KM2得电,同时其常闭触点×2置0,即该触点断开(步骤8),防止Y1(KM1)得电。
Y2得电,常闭触点Y2断开与Y1(KM1)互锁(步骤10),KM2得电,主电路中的主触点闭合,接通电动机电源,升降控制电动机启动开始下降运转(步骤11)。
当电动机下降到限位开关SQ2设定位置时,限位行程开关SQ2动
作,将PLC内×6置o,
即该触点断开,Y2失电,即接触器KM2线圈失电复位,主触点复位断开,电动机停止下降(步骤12)。
电动葫芦原理
电动葫芦是一种利用电力作为动力源进行物体的升降运动的装置。
它主要由电动机、齿轮系统、钢丝绳和控制系统等组成。
电动葫芦的工作原理如下:
1. 电动机:电动葫芦采用电动机作为动力源。
电动机接通电源后,会产生驱动力。
2. 齿轮系统:电动葫芦中的齿轮系统起着传动力的作用。
电动机驱动齿轮转动,通过齿轮的传动,将动力传递给钢丝绳。
3. 钢丝绳:电动葫芦中的钢丝绳承担物体的承载任务。
钢丝绳通过滑轮或滑车的支持,形成了一个闭合的回路。
当电动机驱动钢丝绳旋转时,物体便可进行升降运动。
4. 控制系统:电动葫芦中的控制系统用于控制电动机的启停和运转方向。
通过控制系统,可以实现葫芦的升降、停止和反向运动等操作。
总之,电动葫芦通过电动机产生的动力,通过齿轮系统将动力传递给钢丝绳,从而实现物体的升降运动。
控制系统则起到控制和调节电动葫芦运行的作用。
这种装置在吊装、运输和搬运等领域中得到广泛应用。
电动葫芦培训课件电动葫芦培训课件一、引言电动葫芦是一种广泛应用于工业领域的起重设备,它具有结构简单、操作方便、效率高等优点。
为了更好地利用电动葫芦,提高工作效率和安全性,培训课件的编写和使用显得尤为重要。
本文将介绍电动葫芦培训课件的内容和编写要点,帮助读者更好地理解和运用电动葫芦。
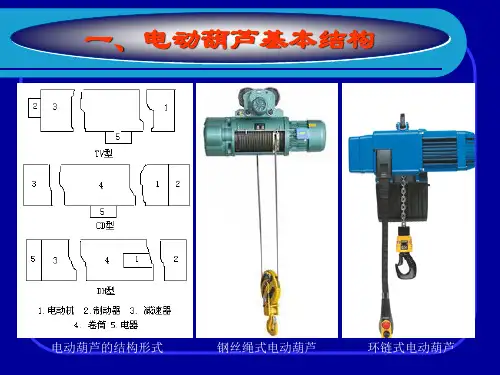
二、电动葫芦的基本原理1. 电动葫芦的结构组成电动葫芦主要由电机、减速器、制动器、卷筒、钢丝绳等组成。
电机提供动力,减速器将电机的高速旋转转换为卷筒的低速旋转,制动器用于控制卷筒的停止和保持。
2. 电动葫芦的工作原理电动葫芦通过电机驱动减速器,使卷筒旋转,通过钢丝绳将货物吊起或放下。
制动器控制卷筒的停止和保持,确保货物的安全。
三、电动葫芦的操作技巧1. 安全操作在使用电动葫芦时,首先要确保工作场所安全,避免有人员或物体处于起重范围内。
操作人员要熟悉电动葫芦的工作原理和操作规程,严格按照操作步骤进行操作,避免操作失误导致事故发生。
2. 负载控制在起重过程中,要根据货物的重量和尺寸合理选择电动葫芦的工作参数,如起重量、起升高度等。
同时,要注意货物的平衡,避免出现倾斜或摇晃的情况,确保货物安全吊装。
3. 维护保养定期对电动葫芦进行维护保养是保证其正常工作和延长使用寿命的重要措施。
包括清洁电动葫芦外表、润滑各个部位、检查电路和制动器等。
同时,要及时发现和处理故障,确保设备的正常运行。
四、电动葫芦的应用场景电动葫芦广泛应用于工业生产中的起重、搬运等工作。
例如,在汽车制造厂中,电动葫芦常用于安装和拆卸发动机;在仓库中,电动葫芦用于货物的装卸;在建筑工地中,电动葫芦用于搬运建筑材料等。
电动葫芦的应用场景多样,能够提高工作效率和安全性。
五、结语电动葫芦作为一种重要的起重设备,在工业生产中发挥着重要的作用。
通过培训课件的编写和使用,可以帮助操作人员更好地理解和掌握电动葫芦的工作原理和操作技巧,提高工作效率和安全性。
希望本文能够对读者有所启发,为电动葫芦的正确使用和维护提供帮助。

![6.2.1 电动葫芦的电气控制电路_怎样识读电气控制电路图_[共3页]](https://uimg.taocdn.com/25d4c45e680203d8cf2f240f.webp)
第 章 起重机械电气控制电路6QM 2-5→QM 1-7→SB 5(动断触点)→KM 1线圈→KM 5辅助动断触点→FU 4→L 13),KM 1主触点[4]闭合,总电源通过KM 1主触点[4]给电动机M 1~M 4供电,则可以通过QM 1、QM 2、QM 4来控制电动机M 1、M 2、M 3以及M 4的工作状态,并且此时由于KM 1的动断触点[24]断开,接触器KM 5不能得电,实现连锁,使变幅电动机M 5不能工作。
若是回转电动机M 4工作,不论电动机是正转还是反转,将QM 4由“0”位置于“1”、“2”位,则KM 41或KM 42得电吸合,电动机M 4正转或反转,同时KM 41、KM 42的辅助动断触点[19]断开,确保KM 44[19]不能得电,使YB 4[9]不能得电,确保制动器松闸。
若使M 4停转,则将QM 4由“1”、“2”位置于“0”位,则KM 41、KM 42[20、21]失电释放,其辅助动断触点[19]复位闭合,为KM 44[19]得电做准备,按下点动按钮SB 2[19],则KM 44[19]得电吸合,其主触点[9]闭合,YB 4[9]得电,制动器紧闸,使M 4迅速停转。
关于QM 1对M 1的控制,见图6.2.7。
② 若需要进行变幅操作,首先将QM 5置于“0”位,然后按下启动按钮SB 5[23、24],则接触器KM 5[24]得电吸合并自锁,其主触点[2]闭合,总电源通过KM 5的主触点[2]给变幅电动机M 5供电,则可以通过QM 5来控制M 5的工作状态,并且此时KM 1不能得电,实现连锁,使电动机M 1~M 4不能工作。
YB 5[3]为M 5的电磁制动器,M 5得电时松闸,M 5失电时抱闸。
6.2 起重运输机械的电气控制电路起重运输机械是一种起吊和运输重物的设备,在车间、仓库和流水加工线上得到广泛的应用,对减轻劳动强度,提高生产效率有着重要的作用,是现代化生产中不可缺少的机械设备之一。