单自由度系统的无阻尼自由振动
- 格式:ppt
- 大小:12.03 MB
- 文档页数:52
1.请指出弹簧的串、并联组合方式的计算方法。
确定弹性元件的组合方式是串联还是并联的方法是什么?对两种组合方式分别加以说明。
答:n 个刚度为i k 的弹簧串联,等效刚度∑==ni ieq k k 111;n 个刚度为i k 的弹簧并联的等效刚度为∑==ni i eq k k 1;并联弹簧的刚度较各组成弹簧“硬”,串联弹簧较其任何一个组成弹“簧软”。
确定弹性元件是串联还是并联的方法:若弹性元件是共位移——端部位移相等,则为并联关系;若弹性元件是共力——受力相等,则为串联关系。
2.非粘性阻尼包括哪几种?它们的计算公式分别是什么? 答:非粘性阻尼包括:(1)库仑阻尼计算公式⎪⎭⎫⎝⎛⋅=.sgn -x mg F e μ,其中,sgn 为符号函数,这里定义为)()()(sgn t x t x x ∙∙∙=,须注意,当0)(x =∙t 时,库仑阻尼力是不定的,它取决于合外力的大小,而方向与之相反;(2)流体阻尼计算公式:是当物体以较大速度在粘性较小的流体(如空气、液体)中运动是,由流体介质所产生的阻尼,计算公式为⎪⎭⎫⎝⎛-=∙∙x x F n sgn 2γ;(3)结构阻尼:由材料内部摩擦所产生的阻尼,计算公式为2X E s α=∆ 3.单自由度无阻尼系统的自由振动的运动微分方程是什么?其自然频率、振幅、初相角的计算公式分别是什么?答:单自由度无阻尼系统的自由振动的运动微分方程()0=+∙∙t kx x m ; 自然频率:mk f n n ππω212==; 振幅:202⎪⎪⎭⎫ ⎝⎛+=nv x X ω;初相角:0x v arcrann ωϕ=。
4.对于单自由度无阻尼系统自由振动,确定自然频率的方法有哪几种?具体过程是什么?答:单自由度无阻尼系统自由振动,确定自然频率的方法:(1)静变形法:该方法不需要到处系统的运动微分方程,只需根据静变形的关系就可以确定出固有频率具体如下:mg k st =δ,又mkn =ω,将这两个式子联立即可求得stn gδω=;(2)能量法,该方法又可以分为三种思路来求自然频率。
1、机械振动按不同情况进行分类大致可分成(线性振动)和非线性振动;确定性振动和(随机振动);(自由振动)和强迫振动。
2、周期运动的最简单形式是(简谐运动),它是时间的单一(正弦)或(余弦)函数。
3、单自由度系统无阻尼自由振动的频率只与(质量)和(刚度)有关,与系统受到的激励无关。
4、简谐激励下单自由度系统的响应由(瞬态响应)和(稳态响应)组成。
5、工程上分析随机振动用(数学统计)方法,描述随机过程的最基本的数字特征包括均值、方差、(自相关函数)和(互相关函数)。
6、单位脉冲力激励下,系统的脉冲响应函数和系统的(频响函数)函数是一对傅里叶变换对,和系统的(传递函数)函数是一对拉普拉斯变换对。
二、简答题(本题40分)1、什么是机械振动?振动发生的内在原因是什么?外在原因是什么? (7分)答:机械振动是指机械或结构在它的静平衡位置附近的往复弹性运动。
(3分)振动发生的内在原因是机械或结构具有在振动时储存动能和势能,而且释放动能和势能并能使动能和势能相互转换的能力。
(2分)外在原因是由于外界对系统的激励或者作用。
(2分)2、从能量、运动、共振等角度简述阻尼对单自由度系统振动的影响。
(12分)答:从能量角度看,阻尼消耗系统的能力,使得单自由度系统的总机械能越来越小;(2分)从运动角度看,当阻尼比大于等于1时,系统不会产生振动,其中阻尼比为1的时候振幅衰减最快(4分);当阻尼比小于1时,阻尼使得单自由度系统的振幅越来越小,固有频率降低,阻尼固有频率d ωω=(2分)共振的角度看,随着系统能力的增加、增幅和速度增加,阻尼消耗的能量也增加,当阻尼消耗能力与系统输入能量平衡时,系统的振幅不会再增加,因此在有阻尼系统的振幅并不会无限增加。
(4分)3、简述无阻尼多自由度系统振型的正交性。
(7分)答:属于不同固有频率的振型彼此以系统的质量和刚度矩阵为权正交。
其数学表达为:如果当s r ≠时,s r ωω≠,则必然有⎩⎨⎧==0}]{[}{0}]{[}{r T s r T s u K u u M u 。
第二章 单自由度无阻尼系统的振动单自由度系统是指用一个独立参量便可确定系统位置的振动系统。
系统的自由度数是指确定系统位置所必须的独立参数的个数,这种独立参量称为广义坐标,广义坐标可以是线位移、角位移等。
单自由度系统振动理论是振动理论的基础,尽管实际的机械都是弹性体,属多自由度系统,然而要掌握多自由度系统振动的基本理论和规律,就必须先掌握单自由度系统的振动理论。
此外,许多工程实际问题在一定条件下可以简化为单自由度振动系统来研究。
单自由度系统的力学模型如图2-1所示,图中,m 为质量元件(或惯性元件),k 为线性弹簧,C 为线性阻尼器。
图2-1所示系统称为单自由度有阻尼系统,若该系统不计阻尼,则称之为单自由度无阻尼系统,若在质量元件上作用有持续外界激扰力,则系统作强迫振动,如无持续的外界激扰力而只有初始的激扰作用,则系统作自由振动。
下面先研究单自由度无阻尼系统的自由振动,再进一步研究其强迫振动。
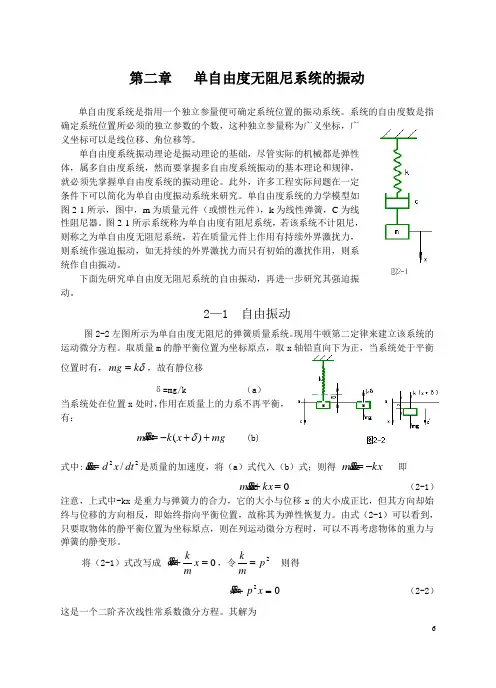
2—1 自由振动图2-2左图所示为单自由度无阻尼的弹簧质量系统。
现用牛顿第二定律来建立该系统的运动微分方程。
取质量m 的静平衡位置为坐标原点,取x 轴铅直向下为正,当系统处于平衡位置时有,δk mg =,故有静位移δ=mg/k (a )当系统处在位置x 处时,作用在质量上的力系不再平衡,有:mg x k xm ++-=)(δ (b) 式中:22/dt x d x = 是质量的加速度,将(a )式代入(b )式;则得 kx xm -= 即 0=+kx xm (2-1) 注意,上式中-kx 是重力与弹簧力的合力,它的大小与位移x 的大小成正比,但其方向却始终与位移的方向相反,即始终指向平衡位置,故称其为弹性恢复力。
由式(2-1)可以看到,只要取物体的静平衡位置为坐标原点,则在列运动微分方程时,可以不再考虑物体的重力与弹簧的静变形。
将(2-1)式改写成 0=+x m k x,令2p mk= 则得 02=+x p x (2-2)这是一个二阶齐次线性常系数微分方程。


y sy(t)机械振动分析------单自由度无阻尼系统的自由振动机械振动是物体(或物体的一部分)在平衡位置(物体静止时的位置)附近作的往复运动。
可分为自由振动、受迫振动。
又可分为无阻尼振动与阻尼振动。
常见的简谐运动有弹簧振子模型、单摆模型等。
振动在机械中的应用非常普遍,例如在振动筛分行业中基本原理系借电机轴上下端所安装的重锤(不平衡重锤),将电机的旋转运动转变为水平、垂直、倾斜的三次元运动,再把这个运动传达给筛面。
若改变上下部的重锤的相位角可改变原料的行进方向。
物体受到初干扰后,仅在系统的恢复力作用下在其平衡位置附近的振动称为无阻尼自由振动。
其中仅需用一个独立坐标就可确定振体位置的系统为单自由度系统。
单自由度系统的振动理论是振动理论的基础。
研究单自由度系统的振动有着非常普遍的实际意义,因为工程上有许多问题通过简化,用单自由度系统的振动理论就能得到满意的结果。
而同时对多自由度系统和连续系统的振动,在特殊坐标系中考察时,显示出与单自由度系统类似的性态。
因此,揭示单自由度振动系统的规律、特点,为进一步研究复杂振动系统奠定了基础。
影响振动作用的因素是振动频率、加速度和振幅。
现在我们就此方面展开对单自由度无阻尼振动的讨论。
主要包括两部分:单自由度无阻尼系统的自由振动和单自由度无阻尼系统的受迫振动。
一、单自由度无阻尼系统的自由振动如下图,设此梁上的集中质量为m ,其重量为W mg ,梁由于质量的重力引起的质量处的静力位移用s y 表示,与s y 相应的质量位置称为质量的静力平衡位置。
若此质量受到扰动离开了静力平衡位置,当扰动除去后,则体系将发生振动,这样的振动称为体系的自由振动。
由于振动的方向与梁轴垂直,故称为横向振动。
在此,只讨论微小振幅的振动,由振动引起的内力限于材料的弹性极限以内,用以表示质量运动的方程将为线性微分方程。
1、建立运动方程建立运动方程常用的基本原理是达朗伯原理(亦称惯性力法或动静法)。
一、填空题1、机械振动按不同情况进行分类大致可分成(线性振动)和非线性振动;确定性振动和(随机振动);(自由振动)和强迫振动。
2、周期运动的最简单形式是(简谐运动),它是时间的单一(正弦)或(余弦)函数。
3、单自由度系统无阻尼自由振动的频率只与(质量)和(刚度)有关,与系统受到的激励无关。
4、简谐激励下单自由度系统的响应由(瞬态响应)和(稳态响应)组成。
5、工程上分析随机振动用(数学统计)方法,描述随机过程的最基本的数字特征包括均值、方差、(自相关函数)和(互相关函数)。
6、单位脉冲力激励下,系统的脉冲响应函数和系统的(频响函数)函数是一对傅里叶变换对,和系统的(传递函数)函数是一对拉普拉斯变换对。
2、在离散系统中,弹性元件储存( 势能 ),惯性元件储存(动能 ),(阻尼 )元件耗散能量。
4、叠加原理是分析(线性 )系统的基础。
5、系统固有频率主要与系统的(刚度 )和(质量 )有关,与系统受到的激励无关。
6、系统的脉冲响应函数和(频响函数 )函数是一对傅里叶变换对,和(传递函数 )函数是一对拉普拉斯变换对。
7、机械振动是指机械或结构在平衡位置附近的(往复弹性 )运动。
1.振动基本研究课题中的系统识别是指 根据已知的激励和响应特性分析系统的性质,并可得到振动系统的全部参数。
(本小题2分)2.振动按激励情况可分为 自由振动 和 强迫振动 两类。
(本小题2分)。
3.图(a )所示n 个弹簧串联的等效刚度=k ∑=ni ik111;图(b )所示n 个粘性阻尼串联的等效粘性阻尼系数=e C ∑=ni ic 111。
(本小题3分)(a ) (b )题一 3 题图4.已知简谐振动的物体通过距离静平衡位置为cm x 51=和cm x 102=时的速度分别为s cm x 201= 和s cm x 82= ,则其振动周期=T 2.97s ;振幅=A 10.69cm 。
(本小题4分)5.如图(a )所示扭转振动系统,等效为如图(b )所示以转角2ϕ描述系统运动的单自由度系统后,则系统的等效转动惯量=eq I 221I i I +,等效扭转刚度=teq k 221t t k i k +。
第二章 单自由度无阻尼系统的振动单自由度系统是指用一个独立参量便可确定系统位置的振动系统。
系统的自由度数是指确定系统位置所必须的独立参数的个数,这种独立参量称为广义坐标,广义坐标可以是线位移、角位移等。
单自由度系统振动理论是振动理论的基础,尽管实际的机械都是弹性体,属多自由度系统,然而要掌握多自由度系统振动的基本理论和规律,就必须先掌握单自由度系统的振动理论。
此外,许多工程实际问题在一定条件下可以简化为单自由度振动系统来研究。
单自由度系统的力学模型如图2-1所示,图中,m 为质量元件(或惯性元件),k 为线性弹簧,C 为线性阻尼器。
图2-1所示系统称为单自由度有阻尼系统,若该系统不计阻尼,则称之为单自由度无阻尼系统,若在质量元件上作用有持续外界激扰力,则系统作强迫振动,如无持续的外界激扰力而只有初始的激扰作用,则系统作自由振动。
下面先研究单自由度无阻尼系统的自由振动,再进一步研究其强迫振动。
2—1 自由振动图2-2左图所示为单自由度无阻尼的弹簧质量系统。
现用牛顿第二定律来建立该系统的运动微分方程。
取质量m 的静平衡位置为坐标原点,取x 轴铅直向下为正,当系统处于平衡位置时有,δk mg =,故有静位移δ=mg/k (a )当系统处在位置x 处时,作用在质量上的力系不再平衡,有:mg x k xm ++-=)(δ (b) 式中:22/dt x d x = 是质量的加速度,将(a )式代入(b )式;则得 kx xm -= 即 0=+kx xm (2-1) 注意,上式中-kx 是重力与弹簧力的合力,它的大小与位移x 的大小成正比,但其方向却始终与位移的方向相反,即始终指向平衡位置,故称其为弹性恢复力。
由式(2-1)可以看到,只要取物体的静平衡位置为坐标原点,则在列运动微分方程时,可以不再考虑物体的重力与弹簧的静变形。
将(2-1)式改写成 0=+x m k x,令2p mk= 则得 02=+x p x (2-2)这是一个二阶齐次线性常系数微分方程。

单自由度系统的受迫振动理论曾凡林哈尔滨工业大学理论力学教研组本讲主要内容1、单自由度系统的无阻尼受迫振动2、单自由度系统的有阻尼受迫振动1、单自由度系统的无阻尼受迫振动受迫振动在外加激振力作用下的振动称为受迫振动。
km简谐激振力是一种典型的周期变化的激振力。
简谐激振力随时间的变化关系可写成:)sin(j w +=t H F 其中:H 称为激振力的力幅,即激振力的最大值;ω是激振力的角频率;j 是激振力的初相角。
(1)振动微分方程m 取物块的平衡位置为坐标原点,x 轴向下为正。
物块的受力为恢复力F e 和激振力F 。
F e F方程两边同除以m ,并令, 得到:m k =20w H h m=)sin(d d 2022j w w +=+t h x tx ——无阻尼受迫振动微分方程的标准形式解可以写成:12xx x =+x 1 对应齐次方程的通解; x 2 对应的是特解。
齐次方程的通解可写为:)sin(01q w +=t A x 特解可写为:2sin()x b t w j =+将x 2 代入微分方程,得到:)sin()sin()sin(22j w j w w j w w +=+++-t h t b t b 解得:220ww -=hb 微分方程的全解为:)sin()sin(2200j w ww q w +-++=t ht A x 结果表明:无阻尼受迫振动是由两个谐振动合成的。
第一部分是频率为固有频率的自由振动;第二部分是频率为激振力频率的振动,称为受迫振动。
第一部分会逐渐衰减,而第二部分则是稳定的。
0sin()A t w q +220sin()ht w f w w+-1、单自由度系统的无阻尼受迫振动(2)受迫振动的振幅2220sin()hx t w j w w=+-系统的受迫振动为简谐振动,振动频率也等于激振力的频率,振幅大小与运动的初始条件无关,而与振动系统的固有频率ω0、激振力的频率ω、激振力的力幅H 相关。
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。
专题一机械振动基础1. 单自由度系统无阻尼自由振动2. 求系统固有频率的方法3. 单自由度系统的有阻尼自由振动4. 单自由度系统的无阻尼强迫振动5. 单自由度系统的有阻尼强迫振动4. 单自由度系统的无阻尼强迫振动4.1 强迫振动的概念4.2 无阻尼强迫振动微分方程及其解4.3 稳态强迫振动的主要特性4. 单自由度系统的无阻尼强迫振动4.1 强迫振动的概念4.2 无阻尼强迫振动微分方程及其解4.3 稳态强迫振动的主要特性)sin(ϕω+=t H F 强迫振动:在外加激振力作用下的振动。
简谐激振力:φ—激振力的初相位H —力幅ω—激振力的圆频率4.1 强迫振动的概念无阻尼强迫振动微分方程的标准形式,二阶常系数非齐次线性微分方程。
)sin(ϕω++−=t H kx x m 则令 , 2m Hh m k n ==ω)sin(2ϕωω+=+t h x x n 4.2 无阻尼强迫振动微分方程及其解全解为:稳态强迫振动21x x x +=)sin(1θω+=t A x n )sin(2ϕω+=t b x 为对应齐次方程的通解为特解)sin(22222ϕωωωωω+−=−=t h x h b n n ,)sin()sin(22ϕωωωθω+−++=t h t A x n n(3) 强迫振动的振幅大小与运动初始条件无关,而与振动系统的固有频率、激振力的频率及激振力的力幅有关。
(1) 在简谐激振力下,单自由度系统强迫振动亦为简谐振动。
(2) 强迫振动的频率等于简谐激振力的频率,与振动系统的质量及刚度系数无关。
4.3 稳态强迫振动的主要特性)sin(222ϕωωω+−=t h x n 稳态响应(1) ω=0时(2) 时,振幅b 随ω增大而增大;当时,n ωω<(3)时,振动相位与激振力相位反相,相差。
n ωω>b 随ω增大而减小;kHh b n ==20ωn ωω →∞→b rad π22ωω−=n hb β:振幅比或动力系数λ:频率比β−λ曲线:幅频响应曲线(幅频特性曲线)10 ; , 20→∞→==b b b n 时时ωωω)sin(222ϕωωω+−=t hx n(4)共振现象,这种现象称为共振,无稳态解。