第7课机器人分辨颜色
- 格式:doc
- 大小:528.50 KB
- 文档页数:5


第7课机器人分辨颜色第7课机器人分辨颜色第一课时教学目标:认知目标:了解地面检测传感器的工作原理。
了解程序中的选择结构的特点。
了解地面检测传感器检测常见八色(红黄蓝橙绿紫白黑)的数值。
技能目标:学会在其他模块中引用地面检测模块的参数变量。
学会应用地面检测传感器令机器人判断路面环境。
学会加载场景文件。
情感目标:感受传感器和分支结构程序的特色,体会程序设计的奇妙。
教学准备:八色圆形图带和小桥图带坏境文件,机器人不同色带判断并显示英文程序,机器人过小桥程序。
教学过程:一、引入讲述:同学们,老师已经让我们的机器人练就了一双火眼金晴,它能够分辨各种各样的颜色,想不想看看?演示:机器人判断颜色并有提示音和显示英文名称的程序。
(交换不同颜色的位置,我们的机器人照样分辨的一清二楚。
)提问:看了这个结果,你想提出什么问题?(生:机器人靠什么来分辨颜色的呢?)今天我们就来学习怎样让机器人练就分辨颜色的本事。
板书:机器人分辨颜色二、学习1.教师讲解辨色程序演示提问:老师的机器人能请分辨颜色的本事,完全靠的是一种特殊的模块。
请仔细观察本来的机器人程序,猜猜是哪个模块?(生:地面检测模块)课件或实物:你的眼晴比机器人还亮,不错,确实是地面检测传感器在起作用。
在机器人第一课中我们已经知道了,机器人身上可以装上各种传感器。
其中地面检测传感器能检测地面反射光的强度。
不同深度的颜色,反射光的强度是不同的。
比如白色是0,黑色是255,大红色是170。
这样,我们的机器人就可以分出颜色来了。
演示:要使机器人能认出颜色,我们首先要放上“地面检测”模块,为了机器人在分辨颜色时告诉我们一声,我们可以紧接着放上“显示”模块。
好了,下面我们加载“不同颜色图带”环境文件,看看机器人能显示颜色值吗?课件演示:为什么不会显示呢?噢,原来机器人身上有各种传感器,要让机器人显示某个传感器的值,我们还需要在显示模块里做好设置。
演示:我们回到程序,需要在“显示”模块里引用地面检测器的数据,这样,才能在机器人显示器上显示出颜色深度值来(用电子教鞭圈出设置区域)。

苏教版五年级上册信息技术教案第7课彩色世界一、教材分析:本课是苏教版五年级上册信息技术第七课,名为《彩色世界》。
本课包括三个部分:知识目标、教学重难点及教学过程。
二、教学目标:1.了解彩色世界的来源和构成。
2.认识颜色的三个要素:色相、饱和度和亮度。
3.了解控制色相、饱和度和亮度的方法。
4.能运用电脑绘图软件进行颜色填充。
5.综合运用颜色知识,在绘图过程中合理运用颜色。
三、教学重难点:1.认识颜色的三个要素:色相、饱和度和亮度。
2.掌握控制色相、饱和度和亮度的方法。
3.能运用电脑绘图软件进行颜色填充。
四、教学准备:1.电脑、投影仪、幻灯片等多媒体教学设备。
2.颜色板、彩色笔、颜料等教学实物。
3.电脑绘图软件等相关材料。
五、教学过程:1. 导入新课(3分钟)教师让学生看一组彩色图片,让学生发表自己对颜色的看法,并引出本节课的主题“彩色世界”。
2. 提出问题(5分钟)教师提问:什么是颜色?颜色是如何分类的?结合图片让学生感性认识到颜色的构成。
3. 学习颜色板的使用(15分钟)教师介绍颜色板的基本构成和使用方法,让学生通过实际操作来了解颜色板的作用。
4. 认识颜色的三个要素(20分钟)教师通过彩色屏幕展示,让学生了解颜色的三个要素:色相、饱和度和亮度,并重点讲解其中的每一个要素。
5. 学习控制色相、饱和度和亮度的方法(20分钟)教师通过多媒体教学资料让学生了解控制颜色的三个要素的方法,并且进行相应的操作。
6. 进行绘画实践(20分钟)教师在电脑上打开绘图软件,让学生通过对颜色的掌握,尝试制作自己所喜欢的图案。
7. 总结和作业(7分钟)教师对本课的内容进行总结,并布置相应的作业。
六、板书设计:彩色世界颜色的构成颜色的分类颜色板的应用掌握颜色的三个要素色相饱和度亮度掌握控制颜色的方法绘制彩色图案七、教学反思:本节课充分运用了多媒体教学手段,使学生在教学过程中得到更加生动形象的学习体验。
在实际操作部分,能够更好的让学生进行合理的创新,并能够更好的理解和掌握控制颜色的方法。

颜色侦测判断scratch教案在现代教育中,技术已经成为了不可或缺的一部分。
随着科技的发展,人们对于教育的要求也越来越高,希望能够通过科技手段更好地促进学生的学习。
在这样的背景下,编程教育逐渐成为了热门话题,许多学校和教育机构开始引入编程教育,以培养学生的逻辑思维能力和创新能力。
而Scratch作为一款简单易用的编程工具,被广泛应用于学校的编程教育中。
Scratch是由麻省理工学院媒体实验室开发的一款免费编程工具,它采用了拖拽式的编程方式,使得编程变得简单易学。
通过Scratch,学生可以轻松地创建动画、游戏和故事等项目,从而培养他们的创造力和解决问题的能力。
而颜色侦测是Scratch中的一个重要功能,它可以帮助学生更好地理解编程中的逻辑思维,并且可以激发他们的创造力。
因此,本文将以颜色侦测判断Scratch教案为标题,探讨如何利用颜色侦测来设计一堂生动有趣的Scratch教学课程。
首先,我们需要明确颜色侦测的概念。
在Scratch中,颜色侦测是指利用计算机摄像头来侦测特定颜色的功能。
通过颜色侦测,学生可以编写程序让角色在特定颜色的背景下做出相应的动作,从而实现一些有趣的效果。
在教学中,可以通过颜色侦测来引导学生学习编程中的条件语句和循环语句,培养他们的逻辑思维能力。
接下来,我们将以一个具体的例子来说明如何利用颜色侦测判断Scratch教案。
假设我们要设计一个游戏,游戏规则是当角色碰到红色的墙壁时,角色会受到伤害;当角色碰到绿色的墙壁时,角色会恢复生命值。
为了实现这个游戏规则,我们可以通过颜色侦测来判断角色所碰到的墙壁的颜色,并根据颜色的不同来执行相应的动作。
首先,我们需要在Scratch中创建一个角色和两个不同颜色的墙壁。
然后,我们可以编写程序来实现颜色侦测。
首先,我们需要使用“当绿旗被点击”积木块来启动程序,然后使用“一直重复”积木块来不断检测墙壁的颜色。
接着,我们可以使用“如果…那么”积木块来判断墙壁的颜色,并根据颜色的不同来执行相应的动作。

粤教版信息技术五年级上册第7课《会听声音的机器人》教学设计一. 教材分析粤教版信息技术五年级上册第7课《会听声音的机器人》主要介绍了如何运用编程思维和简单的编程语句让机器人识别声音,并通过声音控制机器人的行动。
本课内容紧密联系生活实际,能够激发学生的学习兴趣,培养学生的创新意识和实践能力。
教材内容由浅入深,循序渐进,让学生在掌握基础知识的同时,培养解决问题的能力。
二. 学情分析五年级的学生已经具备了一定的信息技术基础,对机器人编程产生了浓厚的兴趣。
但在声音识别和编程方面,部分学生可能还存在一定的困难。
因此,在教学过程中,教师需要关注学生的个体差异,针对性地进行辅导,使全体学生都能在原有基础上得到提高。
三. 教学目标1.让学生了解声音识别在现实生活中的应用,激发学生学习兴趣。
2.培养学生运用编程思维解决问题的能力。
3.引导学生通过合作、探究、实践等方式,掌握声音识别的基本方法。
4.提高学生动手操作能力和创新能力。
四. 教学重难点1.重点:声音识别的基本方法。
2.难点:如何运用编程语句实现声音控制机器人。
五. 教学方法1.任务驱动法:以实际任务为载体,引导学生探究、实践,提高学生解决问题的能力。
2.合作学习法:分组讨论、合作完成任务,培养学生的团队精神和沟通能力。
3.演示法:教师演示操作过程,让学生直观地了解知识要点。
4.实践法:让学生动手操作,巩固所学知识。
六. 教学准备1.硬件准备:准备若干台装有编程软件的计算机和机器人。
2.软件准备:编程软件、教学素材。
3.环境准备:安静的课堂环境,确保学生能清楚地听到声音。
七. 教学过程1.导入(5分钟)教师通过展示一个会听声音的机器人的视频,引发学生的好奇心,激发学生的学习兴趣。
同时提出问题:“你们知道机器人是如何听声音的吗?”让学生思考并回答。
2.呈现(10分钟)教师简要介绍声音识别的基本原理,并通过示例让学生了解声音识别在现实生活中的应用。
同时展示本节课的任务:编写程序,让机器人根据声音指令做出相应的动作。
青少年机器人活动课教案
第七课超声波传感器的应用1
教学目标:1、认识什么是超声波。
2、认识超声波传感器的工作原理,并学会如何在程序中进行简单设置。
3、学生活动,能基本运用超声波传感器。
课时安排:1课时
教学过程:
1、教师总结:通过前两节课的活动同学们已经能熟练的运用触动传感器了,也就是相当于帮我们的机器人找到了触感。
2、教师提问:同学们都知道蝙蝠是夜间活动的小动物,那在漆黑的夜晚快速飞行的蝙蝠是如何躲避障碍的呢?
学生讨论回答
教师总结:同学们通过讨论知道蝙蝠夜间飞行是通过超声波来躲避障碍,也是通过超声波来捕获猎物的。
其实超声波也是声音的一种,只是这种声音超出了我们人耳所能听到的声波范围,所以才叫超声波。
在我们的机器人身上就有一种传感器,它就相当于机器人的耳朵,我们称之为超声波传感器。
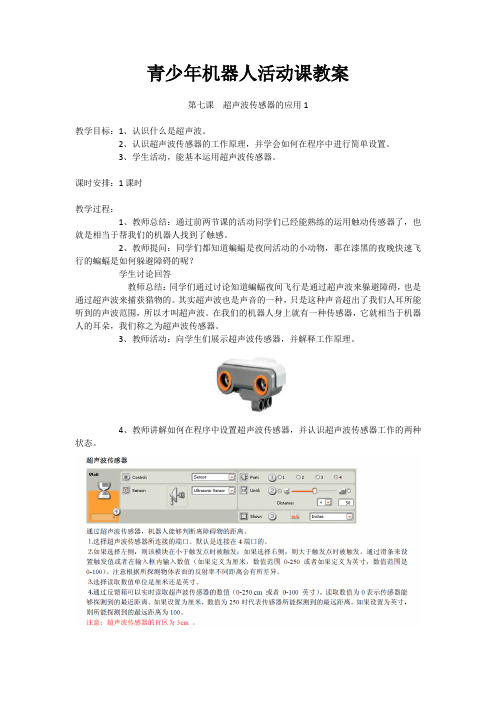
3、教师活动:向学生们展示超声波传感器,并解释工作原理。
4、教师讲解如何在程序中设置超声波传感器,并认识超声波传感器工作的两种状态。
5、学生活动1:利用超声波传感器制作一个不会碰墙的机器人。
6、学生活动2:利用超声波传感器制作一个会跟你走的机器人。
第7课彩色世界第一课时教学过程一、导入:师:在美术课上,当我们要画出红色的太阳、绿色的小草等等的时候,离不开我们的?彩色画笔在我们的LOGO语言的彩色世界里也提供了许多不同颜色的画笔,可是我们要怎样去取用呢?小海龟呀(贴黑白小海龟),已经知道我们遇到这个难题了,瞧,今天啊它给我们带来了一份小礼物。
看!原来是好多漂亮的画笔和画纸。
它想邀请大家它一起来上美术课,你们愿意吗?好!一起来吧!跟着小海龟一起走进LOGO语言彩色的世界吧!提示课题:彩色世界(板书)。
二、新授:师:同学们还记得我们学习《画星星》一课时,为祖国母亲60华诞献上了怎样的一份伟大的礼物吗?对,是用LOGO语言画的一面五星红旗。
你还记得五角星是怎么画的吗?我们一起来回忆一下。
复习:画五角星命令:repeat 5 【fd 100 rt 180-180/5】画N角星命令:repeat N 【fd 100 rt 180-180/N】(通用命令)师:小海龟啊也画了一面红旗要送给祖国母亲(课件展示两幅图)你们看看,一副是我们同学画的,还有一副是小海龟画的,哪一副比较好?为什么呀?(颜色)请你仔细的观察,两面红旗的命令串有什么地方不同?师:同学们观察地真仔细,一下子找出来了,通过观察我们发现第二面国旗的命令串比第一面国旗的命令串多出了两行命令:(板书)SETPC 12 SETPC 14。
那我们同学们猜一猜这两行命令的作用是什么?对,正是因为有了这两条命令第二面五星红旗才有了颜色。
在LOGO语言中,我们用“SETPC”设置画笔颜色命令,来选择用不同颜色的画笔画图。
1.“setpc”命令—设置画笔的颜色SETPC(setpencolor的缩写)我们仔细观察一下这两行命令,谁能猜得到“12和14”的含义吗?它们分别代表什么?真聪明,这个12和14就是颜色的代码。
在pc logo里共有16种颜色,LOGO语言用0-15这16个数字表示不同的颜色,这16个数字就叫做颜色代码。
武汉出版社2016版六年级信息技术教案(1-12课)六年级信息技术教案(上)第1课计算机的⼩卫⼠教学⽬标:1、了解基本的⽹络安全常识2、能够防范病毒⼊侵计算机教学重点:计算机⼩卫⼠的作⽤教学难点:正确安装和使⽤计算机的⼩卫⼠。
教学过程:⼀、新课导⼊本节课,我们将了解基本的⽹络安全常识,并学会防范计算机病毒⼊侵计算机的⽅法。
⼆、探究新知1、制定《安全上⽹⼿册》2、查、杀计算机病毒(1)了解本机中安装的杀毒软件(2)运⾏杀毒软件3、杀毒软件升级(1)升级杀毒软件(2)升级病毒库(3)电脑杀毒4、设置定期杀毒时间表三、我们的收获第2课初识⼆进制编码教学⽬标:1、使学⽣进⼀步理解数的编码⽅式。
2、使学⽣能进⾏数制的转换。
教学重点:把⼗进制数转换成⼆进制数教学难点:把⼗进制数转换成⼆进制数教学过程数字表⽰各种信息,叫做信息的数字化表⽰,也叫信息的编码,这是信息技术的重要环节。
这节课我们⼀起来学习:数的编码⽅式。
⼆、⼗进制和⼆进制向学⽣分别介绍⼗进制数和⼆进制数的特点。
(1)把⼗进制整数转换为⼆进制数因为同学们第⼀次进⾏这种运算,所以⽼师必须⼀步⼀步讲清楚,让同学掌握数制转换的⽅法。
(2)除2取余把⼀个⼗进制整数转换为⼗进制数,只要将这个⼗进制整数⼀次⼜⼀次地被2除,得到的余数(从最后⼀次的余数写起)就是⽤⼆进制表⽰的数。
[例1] 把⼗进制数17转换为⼆进制数解:∴ 17(10)=10001(2)让学⽣练习: 11(10)=(2)92(10)=(2)129(10)=(2)136(10)=(2)248(10)=(2)注意:把⼀个⼗进制数转换为⼆进制数,整数部分可以⽤除2取余法,对于⼩数部分就⽤基数2连续去乘它,直到乘积的⼩数部分等于“0”为⽌。
如果⼗进制⼩数不能⽤有限位⼆进制⼩数表⽰时,那么可以根据对精度的要求,选取⼀定的位数。
下⾯列举两个例⼦:[例2] 把⼗进制数123.75转换为⼆进制数解:0.5×2=1 1∴ 123.75(10)=1111011.11(2)[例3]把⼗进制数0.65转换为⼆进制数解:⼗进制数进位0.65×2=1.30 10.3×2=0.6 00.6×2=1.2 10.2×2=0.4 00.4×2=0.8 00.8×2=1.6 10.6×2=1.2 1∴ 0.65(10)=0.1010011(2)+∈∈是尾数误差,∈<2-7通过上述例⼦的讲授和学⽣适应练习(学⽣练习可以让⼏个学⽣到⿊板上做,其他学⽣做在练习本上。
幼儿园科技教育——机器人颜色探索教案教学主题:机器人颜色探索教学对象:幼儿园儿童教学目标:1. 了解颜色的基本概念和分类方式。
2. 通过机器人操作和学习,探究各种颜色之间的相互转换及组合。
3. 提高幼儿的动手能力和思维逻辑能力。
教学步骤:一、导入环节:(10分钟)1. 师生问答:引导幼儿回忆颜色的名字,以及各种颜色在生活中的应用场景。
2. 展示色卡:教师出示红、黄、蓝、绿、橙、紫等基本颜色的色卡,让幼儿辨认并记住。
二、讲解环节:(20分钟)1. 讲解颜色分类:教师介绍颜色的三种分类方式:原色、次级色和衍生色,并解释每一类颜色的基本特征和由哪些颜色组成。
2. 介绍机器人:介绍机器人的基本概念和构造,让幼儿初步了解机器人的工作原理和目的。
三、实践环节:(60分钟)1. 操作机器人:教师让幼儿依次操作机器人,使其识别红、黄、蓝、绿、橙、紫等颜色,并呈现相应的光效。
2. 探究转换:让幼儿随机挑选两种颜色,让机器人将其相互转换,并观察颜色的变化效果。
3. 组合创作:让幼儿自由组合两种或三种颜色,让机器人呈现出他们组合后的结果,并发表自己的感想。
四、总结反思:(10分钟)1. 回顾教学内容,让幼儿再次强化颜色分类和机器人操作的理解和记忆。
2. 总结活动过程中幼儿的问题和收获,并鼓励他们在日常生活中多观察、多创造。
教学评估:1. 观察幼儿对颜色分类的理解和记忆,以及机器人操作的熟练程度。
2. 通过幼儿的自由组合和表达,评估他们的思考能力和创造力。
教学延伸:1. 继续探究机器人的使用方法和技巧,增加它在生活中的应用价值。
2. 根据幼儿的兴趣和水平,扩大颜色分类的范围和难度。
教学资源:1. 机器人和遥控器。
2. 颜色分类卡片和色卡。
3. 活动桌椅、绘画纸笔等。
教学建议:1. 确保教学环境安全卫生。
2. 保证幼儿的积极参与和自由发表。
3. 灵活运用多种教学手段和方法,确保教学效果。
教学设计题目第7课认识机器人总课时 1 学校长岗中学教者高颜锐年级七年学科信息技术设计来源网络、教材教学时间2011年10月24日-10月28日教材分析本课选自黑龙江教育出版社出版的信息技术教材七年级上册中的课,本课同学们都感兴趣的讲解,会很好的激发同学们的学习兴趣。
学情分析多多练习,掌握更多计算机使用的方法教学目标1.了解机器人的信息2.了解机器人的怎样设计的3.通过信息能了解更多的信息处理设备重点了解机器人的信息难点了解机器人的信息课前准备网络教室教学流程分课时环节与时间教师活动学生活动△设计意图◇资源准备□评价○反思1课时一引入10同学们你们知道机器人吗?知道它是怎样制作的?学生听并明确学习目标创设教学情境引入新课教学二新课教学251.智能机器人2.智能机器人的分类汽车工业机器人弧焊机器人火星探险机器人高楼清洁机器人娱乐机器人导盲机器人教学机器人3.机器人编程软件教师在课堂中巡视,解决学生在操作中出现的疑难问题。
学生上机操作1、结合教材完成任务一、二。
在练习过程中,完成快的同学辅导操作有困难的同学。
2、结合教材及网上教程完成其他任务,操作能力好的学生进行上机演示,边演示边讲解其操作的过程,激发全班同学的学习积极性和学习兴趣,一起参与到课堂教学中来。
引导学生结合生活实际讲解网络连接的实例引导学生上网了解信息的重要性引发思考联系生活引发学生学习计算机兴趣三小结10启发引导学生完成教材中的任务。
学生进行总结拓展学习总体要求:1.“统一”设计“分段”教学;2.围绕“三维”落实“三问”;3.充实“心案”活化“形案”。
第7课机器人分辨颜色
第一课时
教学目标:
认知目标:
了解地面检测传感器的工作原理。
了解程序中的选择结构的特点。
了解地面检测传感器检测常见八色(红黄蓝橙绿紫白黑)的数值。
技能目标:
学会在其他模块中引用地面检测模块的参数变量。
学会应用地面检测传感器令机器人判断路面环境。
学会加载场景文件。
情感目标:
感受传感器和分支结构程序的特色,体会程序设计的奇妙。
教学准备:八色圆形图带和小桥图带坏境文件,机器人不同色带判断并显示英文程序,机器人过小桥程序。
教学过程:
一、引入
讲述:同学们,老师已经让我们的机器人练就了一双火眼金晴,它能够分辨各种各样的颜色,想不想看看?
演示:机器人判断颜色并有提示音和显示英文名称的程序。
(交换不同颜色的位置,我们的机器人照样分辨的一清二楚。
)
提问:看了这个结果,你想提出什么问题?(生:机器人靠什么来分辨颜色的呢?)今天我们就来学习怎样让机器人练就分辨颜色的本事。
板书:机器人分辨颜色
二、学习
1.教师讲解辨色程序
演示提问:老师的机器人能请分辨颜色的本事,完全靠的是一种特殊的模块。
请仔细观察本来的机器人程序,猜猜是哪个模块?(生:地面检测模块)
课件或实物:你的眼晴比机器人还亮,不错,确实是地面检测传感器在起作用。
在机器人第一课中我们已经知道了,机器人身上可以装上各种传感器。
其中地面检测传感器能检测地面反射光的强度。
不同深度的颜色,反射光的强度是不同的。
比如白色是0,黑色是255,大红色是170。
这样,我们的机器人就可以分出颜色来了。
演示:要使机器人能认出颜色,我们首先要放上“地面检测”模块,为了机器人在分辨颜色时告诉我们一声,我们可以紧接着放上“显示”模块。
好了,下面我们加载“不同颜色图带”环境文件,看看机器人能显示颜色值吗?
课件演示:为什么不会显示呢?噢,原来机器人身上有各种传感器,要让机器人显示某个传感器的值,我们还需要在显示模块里做好设置。
演示:我们回到程序,需要在“显示”模块里引用地面检测器的数据,这样,才能在机器人显示器上显示出颜色深度值来(用电子教鞭圈出设置区域)。
增加一个“永远循环”
模块,可以使机器人不断检测当前所在的颜色。
2.学生仿写辨色程序
学生活动:下面请同学们编写机器人辨色程序,并将不同深度颜色的检测值填写在下列
然颜色不同,但它们的深度相同,反射的光的强度是一样的,所以机器人检测出的数值也是一样的。
研究到这里,你想说什么?(生:机器人有点色盲,希望能发明出能检测各种颜色的传感器)
3.教师讲解机器人过小桥程序
演示:但是,用上地面检测传感器,机器人自己能分清颜色深浅的路面,已经是很不错了。
下面我们来欣赏一段程序。
整个图,黄色代表小桥,蓝色代表小河,绿色代表河岸。
把机器
人放在小桥上,机器人就直行,放在其他区域,机器人打转。
猜想一下,这段机器人程序用到了哪些模块?
演示:检测到黄色时前进,检测其他颜色就打转,这说明程序里有个条件判断。
我们可以直接在地面检测模块中设置条件。
演示:当地面变量是什么值时,条件成立,机器人前进?(生:黄色)黄色,对应哪个颜色数值?(生:85)
当设置好条件好,地面检测模块的模样也变换了,变成了菱形。
流程图上也变成了左、右二个分叉。
这样的,有分叉的程序,我们称为选择结构或分支结构(板书)。
上面的“是”与“否”是什么意思呢?那么我们应该在“是”和“否”的流程上放什么模块?板书:流程图(看来,有了分支结构,机器人就能像人一样进行判断和思考了。
)
4.学生仿写机器人过小桥程序
学生活动:学生编写并调试。
反馈:当把机器人放在小河里时,机器人会如何?为什么会这样?程序是怎样执行的?把它放在河岸上呢?
学生活动:将直行与右转交换位置会怎样?当检测当小桥时,机器人会怎样走?试一试三、小结
提问:通过今天的编程,我们的机器人能分辨颜色了。
要使机器人能分辨颜色,需要用到什么模块?要使机器人检测到不同的颜色并做出不同的行动,需要用到什么程序结构?它的执行过程是怎样的?。