电动机差动保护装置
- 格式:doc
- 大小:1.03 MB
- 文档页数:12
高压电动机差动保护原理及注意事项差动保护是大型高压电气设备广泛采用的一种保护方式,2000KW以上的高压电动机一般采用差动保护,或2000kW(含2000kW)以下、具有六个引出线的重要电动机,当电流速断保护不能满足灵敏度的要求时,也装设纵差保护作为机间短路的主保护。
差动保护基于被保护设备的短路故障而设,快速反应于设备内部短路故障。
对被保护范围区外故障引起区内电流变化的、电动机启动瞬间的暂态峰值差流、首尾端CT不平衡电流等容易引起保护误判的电流,对于不同的差动保护原理,有不同的消除这些电流的措施。
差动保护的基本原理为检测电动机始末端的电流,比较始端电流和末端电流的相位和幅值的原理而构成的,正常情况下二者的差流为0,即流入电动机的电流等于流出电动机的电流。
当电动机内部发生短路故障时,二者之间产生差流,启动保护功能,出口跳电动机的断路器。
微机保护一般采用分相比差流方式。
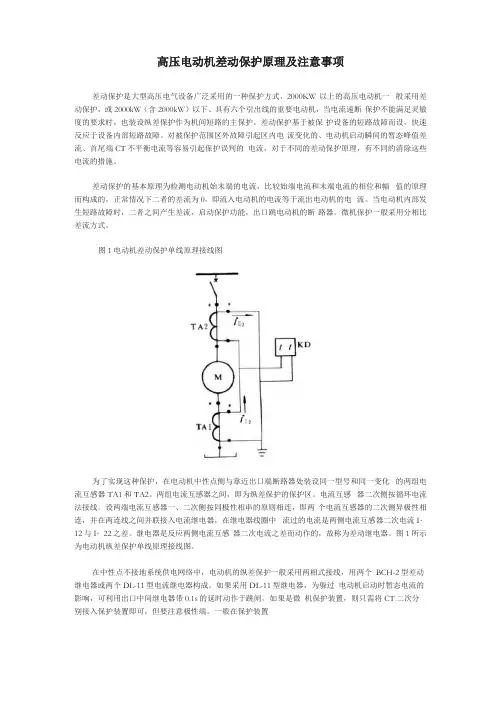
图1电动机差动保护单线原理接线图为了实现这种保护,在电动机中性点侧与靠近出口端断路器处装设同一型号和同一变化的两组电流互感器TA1和TA2。
两组电流互感器之间,即为纵差保护的保护区。
电流互感器二次侧按循环电流法接线。
设两端电流互感器一、二次侧按同极性相串的原则相连,即两个电流互感器的二次侧异极性相连,并在两连线之间并联接入电流继电器,在继电器线圈中流过的电流是两侧电流互感器二次电流I・12与I・22之差。
继电器是反应两侧电流互感器二次电流之差而动作的,故称为差动继电器。
图1所示为电动机纵差保护单线原理接线图。
在中性点不接地系统供电网络中,电动机的纵差保护一般采用两相式接线,用两个BCH-2型差动继电器或两个DL-11型电流继电器构成。
如果采用DL-11型继电器,为躲过电动机启动时暂态电流的影响,可利用出口中间继电器带0.1s的延时动作于跳闸。
如果是微机保护装置,则只需将CT二次分别接入保护装置即可,但要注意极性端。
一般在保护装置端子上有交流量或称模拟量输入的端子,分别定义为Ia1、Ia1*、Ic1、Ic1* (电机的端电流),Ia2、Ia2*、Ic2、Ic2* (电机的中性线电流),带*的为极性端。
电动机差动保护原理
电动机差动保护是一种保护电动机的措施,其原理是通过比较电动机的不同相电流,来检测是否存在故障。
差动保护通常包括两个主要部分:差动电流互感器和差动保护装置。
互感器位于电动机的供电线路中,用于检测电动机的相电流。
它通过感应电流的变化,将电流信号转化为电压信号。
互感器通常由多个线圈组成,其中一部分连接在供电线路的进线侧,另一部分连接在出线侧。
当电动机正常运行时,进线侧和出线侧的电流应该相等,因此互感器的输出电压应该接近零。
差动保护装置比较互感器的输出电压,如果发现有较大的差异,就会发出故障信号,并采取适当的措施来切断供电。
差异可能是由于电动机内部的故障或线路短路引起的。
差动保护装置通常包括了灵敏性调节装置,用于调整差动保护的动作灵敏度。
差动保护可靠性较高,可以有效地保护电动机不受损坏。
然而,差动保护也有一些限制。
例如,在启动电动机或者母线电压发生偏差时,差动保护可能会误动作。
因此,在设计和配置差动保护装置时,需要考虑这些因素,并进行相应的调整和保护配置。
总之,电动机差动保护通过比较电动机的不同相电流来检测故障,并采取措施来切断电源,以保护电动机的安全运行。
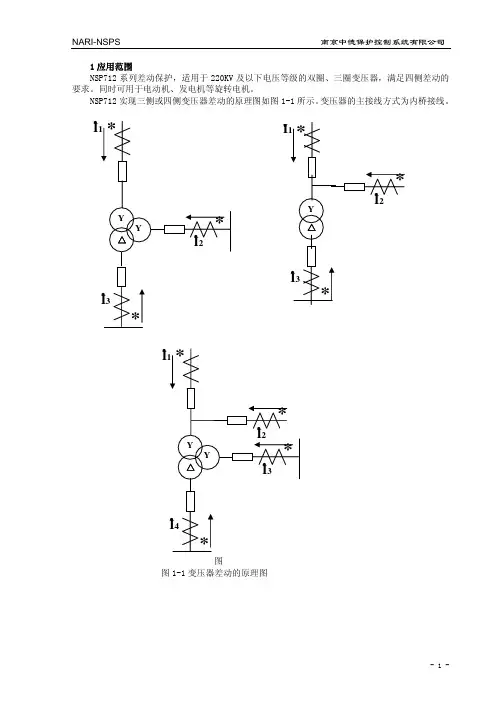
1应用范围NSP712系列差动保护,适用于220KV 及以下电压等级的双圈、三圈变压器,满足四侧差动的要求。
同时可用于电动机、发电机等旋转电机。
NSP712实现三侧或四侧变压器差动的原理图如图1-1所示。
变压器的主接线方式为内桥接线。
I ●I ●I ●图图1-1变压器差动的原理图I●图1-2电动机/发电机差动的原理图NSP712包括差动速断保护,比率差动保护,复合电压过流保护,零序电压保护、过负荷保护、CT断线判别等功能。
NSP712装置中的比率差动保护采用二次谐波制动。
NSP712A包括差动速断保护,比率差动保护、CT断线判、非电量保护等功能。
NSP712A装置中的比率差动保护采用二次谐波制动。
2装置特点2.1 DSP硬件平台NSP712系列差动保护装置采用高性能数字信号处理器DSP芯片作为保护装置的硬件平台,为真正的数字式保护2.2独立的启动元件本装置有独立的整机起动元件,该起动元件动作后才开放保护装置出口继电器正电源,同时进入故障测量计算程序进行动作逻辑判断直至跳闸。
2.3采用软件调整自动进行CT匹配和矢量变换;2.4采用可靠的CT断线报警闭锁功能,保证装置在CT断线及交流回路故障时不误动。
2.5本装置算法的突出特点是在较高采样率的前提下,保证了在故障全过程对所有继电器的并行实时计算,装置有很高的固有可靠性及动作速度。
3技术数据 3.1额定数据 直流电源: 220V,110V允许偏差+15%,-20%交流电流: 5A,1A频 率: 50Hz3.2功耗 交流电压: 0.5VA/相交流电流: <1VA/相(I N=5A) <0.5VA/相((I N=1A)直 流: 正常<15W跳闸<25W 3.3主要技术指标 3.3.1差动保护 比率差动起动定值: 0.1Ie~1.0Ie(Ie 为额定电流)差动速断定值: 4Ie~10Ie(Ie 为额定电流)比率差动起始斜率: 0.1~0.30比率差动最大斜率: 0.30~0.80二次谐波制动系数:0.1~0.4比率差动动作时间: ≤ 40 ms (2 倍定值)差动速断动作时间: ≤ 35ms (1.5 倍整定值)比率差动定值误差: ±5% 或±0.01In差动速断定值误差: ±3%3.3.2复合电压过流保护 负序电压定值: 1V~20V低电压定值: 10V~100V电流定值: 0.1A~100A延时定值: 0.1~100s电压定值误差: ±2.5% 或±0.05V电流定值误差: ±2.5% 或±0.01In延时定值误差: ±1%定值± 40ms3.3.3 零序过压保护 零序电压定值: 10.0V~300V延时定值: 0.1~100s电压定值误差: ±2.5% 或±0.05V延时定值误差: ±1%定值± 40ms3.3.4过负荷保护 电流定值: 0.1A~100A延时定值: 0.1~100s电流定值误差: ±2.5% 或±0.01In延时定值误差: ±1%定值± 40ms3.4 冲击电压各输入输出端子对地,交流回路与直流回路间,交流电流与交流电压间能承受5KV(峰值)标准雷电冲击波试验。
电动机变频差动保护在发电厂中的应用摘要:常规的电动机工频差动保护装置无法在变频工况下正常运行,为了保证大容量电动机在变频工况下不失去差动保护,装设专用的变频差动保护是必要的。
本文介绍了北四方公司研发的CSC-236D型变频差动保护装置在景德镇发电厂中的应用,并通过试验和试运行验证了该保护的可靠性。
关键词:变频差动保护改造可靠性1 引言景德镇发电厂每台机组设计两台凝结水泵,正常工况下,一台凝结水泵变频运行,另一台凝结水泵工频备用。
凝结水泵电动机额定功率为2000kW,原设计按规定配置北四方公司生产的CSC-237A电动机综保及CSC-236工频差动保护。
当凝泵在变频状态下运行时,差动保护不能满足变频状态应用要求,在变频启动时经常误动,所以凝结水泵在变频运行时必须退出CSC-236差动保护,但是根据《继电保护和安全自动装置技术规程(GB/T 14285-2006)》第4.13.2.2中规定2MW及以上电动机应装设纵联差动保护。
为保证设备安全,改装北四方公司专门针对电动机变频工况研制的CSC-236D电动机变频差动保护装置,经过试验和试运行,该型保护可靠性得到验证。
2 退出工频差动保护的原因和危害2.1 退出工频差动保护的原因工频差动保护不能适用于宽范围调速的变频电动机,在变频运行方式时为防止误动,不得不退出差动保护,主要原因有以下几点:1)两侧CT分别是工频和变频,电流无法匹配,常规的微机保护基于50Hz进行相量计算,在其他频率下,相量计算结果不正确。
当偏离50Hz越多,误差越大,易导致保护误动。
2)一次CT、内部小CT无法正常传变。
低频情况下,一次CT容易饱和,无法获取真实的电流信息,现场常规电流互感器二次额定多为5A,根据分析计算,频率低于15Hz时,电流互感器的比差大于10%,当频率低于10Hz时,对应的比差大于20%。
可见常规电流互感器不能很好的用于加装变频器的电动机保护。
3)内部算法不能适应变频采样要求,常规的差动保护用的两组CT频率不同,无法构成差动;原构成电动机差动保护的两组CT,分别为常规50Hz和经变频器变频调节后的宽频率,将无法构成差动保护。
大型电动机高阻抗差动保护原理、整定及应用大型电动机高阻抗差动保护原理、整定及应用一、引言随着电力系统的发展和电动机的广泛应用,电动机保护也变得越来越重要。
其中差动保护是电动机保护中常用的一种方法,它可以有效地检测电动机的故障并及时采取保护措施。
本文将介绍一种常用的差动保护方案——大型电动机高阻抗差动保护,包括其原理、整定方法以及应用。
二、大型电动机高阻抗差动保护原理大型电动机高阻抗差动保护是一种基于电流差动原理的保护方案。
它通过比较电动机的输入和输出电流来检测电动机的故障。
具体原理如下:1. 故障前状态:电动机的输入和输出电流应该是相等的,差动电流为零。
2. 故障发生:当电动机发生故障时,比如转子绕组短路或绝缘损坏,会导致差动电流增大。
3. 保护动作:差动保护装置会监测输入和输出电流的差值,当差值超过设定的阈值时,会发出保护信号,触发断路器断开电路,以保护电动机不受进一步损坏。
三、大型电动机高阻抗差动保护整定方法1. 阻抗整定:大型电动机高阻抗差动保护的阻抗整定是非常关键的一步。
阻抗整定的目的是确定差动电流的阈值,使其能够准确地检测电动机的故障。
阻抗整定一般通过实验来进行,根据电动机的特性和运行状态来确定阈值。
2. 故障判据:大型电动机高阻抗差动保护的故障判据一般是根据电动机的额定电流和差动电流的比值来确定的。
当差动电流与额定电流的比值超过一定的阈值时,就判定为电动机故障。
3. 阈值设定:阈值设定是根据电动机的特性和运行条件来确定的。
一般来说,阈值设定应该略大于电动机在正常运行状态下的差动电流,以确保能够准确地检测到故障。
四、大型电动机高阻抗差动保护应用大型电动机高阻抗差动保护广泛应用于各种大型电动机的保护中,尤其是对于容易发生故障的电动机,如高压电机、重载电机等。
它可以有效地检测电动机的故障,避免因故障而导致设备损坏甚至事故发生。
大型电动机高阻抗差动保护还可以与其他保护装置相结合,形成多重保护,提高电动机的安全性和可靠性。
第三章WDZ-430EX电动机综合保护测控装置1. 产品用途及特点WDZ-430EX电动机综合保护测控装置(以下简称装置)主要用于大型及中型三相异步电动机的综合保护和测控,对特大型电动机(2000KW及以上,或主保护灵敏度校验不合格)需加装与之配套的WDZ-431EX电动机差动保护装置。
装置可配置独立的操作回路和防跳回路,可适用于各种出口的电动机回路。
完备的保护功能:●电流速断保护(反向功率闭锁)●负序过流一段保护●负序过流二段保护●接地保护●过热保护●过热禁止再启动保护●堵转保护●长启动保护●正序过流保护●过负荷保护●欠压保护●PT断线告警●FC回路大电流闭锁出口●熔断器保护●独立的操作回路和防跳回路(选配)●故障录波和电机启动过程录波测控功能:●10路遥信开入采集、装置内部遥信、事故遥信●断路器遥控跳、合●遥测量:三相电压,三相电流,P,Q,功率因数,频率●2路脉冲量输入实现外部电度表自动抄表●内嵌高精度智能电度表,输出有功脉冲,可节省外部电度表(选配)●1路4~20mA直流模拟量输出,替代变送器作为DCS测量接口(选配)●电动机启动信息和启停次数统计通讯功能:●多种通讯接口:RS485、CAN、以太网,可支持双网本装置具有如下特点:●采用先进的32位嵌入式微处理器●汉字液晶显示、操作简便直观●用串行EEPROM存放保护定值●可预先设定5套定值适应各种运行工况●带掉电保持的SOE和自检报告●软、硬件冗余设计,抗干扰性能强●完善的软、硬件自检,二级看门狗●全密封嵌入式机箱设计,体积小,重量轻,可直接安装在开关柜上●安全可靠的高速现场总线技术,支持RS485、CAN、以太网,支持双网●完善、灵活的保护功能,全面、准确、可靠的测控功能●可选配DCS测量接口(4~20mA模拟量输出)●可选配独立的操作回路和防跳回路,并能自动适应跳合闸电流的大小。
2. 主要保护功能及原理保护原理框图见图3.1。
t<t qd(t≥t qd(I max≤1.05I eI0>I0dzI maxI2>I21dzI2>I22dz I0≥[1+(I max/I e-1.05I a反向功率闭锁A相正方向I bB相正方向I cC相正方向I a反向功率闭锁A相正方向I bB相正方向I cC相正方向Ia>Ifcbs Ib>Ifcbs Ic>IfcbsIa>Ib>Ic >注:U max =Max (Uab,Ubc,Uca ),,其他符号定义参见定值表 BTJ 为保护跳闸继电器ACT 为保护动作信号继电器 FLT 为保护动作告警继电器I max =Max (Ia,Ib,Ic )Umax<5V Imax>Ie/4Umax>20VImax>Ie/4I a >I gfh I c >I gfh保护启动前U max >1.05U qyI 1>I 1glI c <1.125I eI b <1.125I e I b >1.I c >1.t>t yd t>t qdjPT 断线闭锁I a >1.I a <1.125I e I b >I gfh I b I c I a U bc <U qy U ab <U qy U ca <U qy U max <5V I max <I e /8开关在合位图3.1 WDZ-430EX 保护原理框图2.1.电流速断保护(反向功率闭锁)其动作判据为:I max=max(I a,I b,I c)I max>I sdg 在电动机额定启动时间内或I max>I sdd在电动机额定启动时间后t>t sd式中,I max:A、B、C相电流(I a,I b,I c)最大值(A)I sdg:速断动作电流高值(电动机启动过程中速断电流动作值)(A)I sdd:速断动作电流低值(电动机启动结束后速断电流动作值)(A)t sd:整定的速断保护动作时间(s)本保护在电动机启动时,可以避开启动开始瞬间的暂态峰值电流。
高压电动机差动保护处理
高压电动机差动保护是一种用于保护电动机的重要保护手段,它能够检测电动机中的相电流差异,一旦出现差异超过设定的阈值,就能及时切断电源,避免电动机损坏。
对于高压电动机差动保护的处理,可以采取以下几种措施:
1. 检查接线:首先要检查电动机的接线情况,确保各相线路无误连接。
如果发现接线有误,应及时进行纠正。
2. 检查绝缘:接着要检查电动机的绝缘状况,确保绝缘良好。
如果发现绝缘存在问题,应及时进行修复或更换。
3. 调整差动保护装置:差动保护装置通常有灵敏度调整、零序电流调整等功能,可以根据实际情况进行调整,使装置能够准确地检测到相电流的差异。
4. 清洁电机:定期对电动机进行清洁,保持电机内部的通风良好,防止电机过热引起差动保护动作。
5. 定期检测:定期对差动保护装置进行检测和测试,确保其正常工作。
检测可以包括对装置的灵敏度、动作时间等指标进行检验。
6. 加装辅助保护装置:可以考虑在差动保护装置外加装电流保护、短路保护等辅助保护装置,以提供更全面的电动机保护。
总之,高压电动机差动保护处理包括对接线、绝缘、保护装置等方面进行检查和调整,确保差动保护装置能够准确地检测到相电流的差异,并及时切断电源,保护电动机的安全运行。
差动回路的工作原理
差动回路是一种用于保护电力系统中的设备的保护装置,例如电动机、发电机、变压器等。
其工作原理基于差动原理,即将被保护设备的输入电流与输出电流进行比较,如果两者之间存在差异,则表示设备可能发生故障。
差动回路通常由差动保护装置、CT(电流互感器)和电缆组成。
CT通常将被保护设备的输入电流和输出电流分别连接到差动回路中。
差动保护装置控制并监测差动回路中的电流。
当输入电流和输出电流之间的差异超过预设的阈值时,差动保护装置将触发保护动作,通常是切断故障电流。
差动回路的工作原理是基于对电流的采样和比较。
输入电流和输出电流的采样通过CT实现,CT将电流信号转换为电压信号。
这些电压信号被传输到差动保护装置中进行比较。
如果输入电流和输出电流之间的差异超过预设的阈值,差动保护装置将检测到这个差异并触发保护动作。
差动回路的工作原理可以有效地检测和保护电力系统中的设备故障。
通过比较输入电流和输出电流之间的差异,差动保护装置可以快速准确地判断设备是否发生故障,并及时采取保护措施,以防止故障进一步扩大并保护设备的安全和可靠运行。
保护装置的原理是什么?一、保护装置的作用及原理保护装置在电力系统中起着关键的作用,它能够监测并保护电力设备免受各类故障和异常工况的影响,确保电力系统的安全运行。
保护装置的原理可以简述为三个方面:故障检测、故障定位和故障隔离。
1. 故障检测保护装置通过监测电力系统中的电流、电压以及其他相关参数,实时检测电力设备的运行状况。
当电力设备发生故障时,其性能参数会出现异常变化,比如电流偏差过大或频率异常,保护装置能够及时察觉到这些异常信号。
2. 故障定位一旦保护装置检测到故障信号,它需要迅速准确地判定故障的发生位置,以便采取相应措施以消除故障。
在故障定位中,保护装置根据监测到的信号和事先设定的故障模型,通过计算和分析,可以确定故障出现的位置,并向系统的操作员提供相关信息。
3. 故障隔离一旦故障位置得到确定,保护装置需要迅速隔离故障区域,以保证其他部分的正常运行。
保护装置会触发相关的断路器或其他开关设备,将故障区域与正常区域隔离开来,以避免故障扩散和进一步影响电力系统的运行。
二、保护装置的分类及功能根据其功能和应用范围的不同,保护装置可以分为多种类型。
以下是常见的几种保护装置及其功能:1. 过电流保护装置过电流保护装置是最常见的一种保护装置,它可以监测电路中的过电流故障,并及时切断电路,防止电线过载和设备损坏。
过电流保护装置通常根据故障类型和故障严重程度的不同,分为瞬时过电流保护和时间限制过电流保护。
2. 继电保护装置继电保护装置主要用于监测电力设备的电气量和继电器的状态,通过对电气量的测量和继电器的判断,实现故障检测、定位和隔离。
继电保护装置具有速度快、准确性高的特点,能够精确判定故障的发生,并迅速隔离故障区域,从而防止事故的发生。
3. 差动保护装置差动保护装置主要用于对电力变压器和电动机等设备进行保护。
差动保护装置通过监测电气设备的输入和输出电流的差值,来判断电气设备是否发生故障。
当故障发生时,差动保护装置会立即切断故障电路,避免故障扩大。
差动保护动作的原理
差动保护是一种电气保护装置,用于保护电力系统中的发电机、变压器和电动机等设备。
它的原理是利用设备两端的电流差值进行判断,当电流差超过设定的阈值时,差动保护装置会动作从而切断故障电路。
差动保护的原理可以分为以下几个步骤:
1.测量相间电流:差动保护装置会通过电流互感器等装置测量设备两端的相间电流。
这些电流值会传送到差动保护装置的继电器中进行处理。
2.计算电流差值:差动保护装置会通过对测量到的相间电流进行计算,得到相间电流的差值。
通常采用的计算方法是将设备两端的电流进行求和,然后与设备额定电流进行比较。
3.判断电流差值是否超过阈值:差动保护装置会将计算得到的电流差值与设定的阈值进行比较。
如果电流差值超过了阈值,说明设备发生了故障。
4.动作保护装置:当电流差值超过阈值时,差动保护装置会动作,切断故障电路,从而保护设备免受进一步损坏。
总结起来,差动保护的原理就是通过测量设备两端的电流差值,判断设备是否发生故障,并在故障发生时动作,以保护设备的安全运行。
关于差动保护相关参数的描述,帮助大家理解PMC装置差动保护原理。
差动保护装置可用于双绕组变压器、电抗器、发电机、大型电动机以及其它双端设备的电流差动保护。
继电器可适应各种电力变压器连接。
继电器能自动补偿各种连接来获取适用的差动动作量。
差动保护装置的变压器差动保护功能设计了一套可整定的动作电流启动量以及两个百分比制动折线特性。
这样可使继电器设置灵敏,同时使继电器能够在高故障电流情况下区分内部和外部故障。
继电器也提供一种无制动元件来快速去除高值内部故障。
二次和五次谐波闭锁使继电器可通过电流信号中的频率分量来区分由内部故障和由励磁涌流或过励磁引起的差动电流。
谐波闭锁元件具有可整定的门槛。
差动保护装置原理与国内的微机型差动保护原理几乎是一样的,即使是与常规的电磁型比拟,原理也是类似,只不过微机型保护的应用更方便。
如:常规电磁型差动保护星三角变换(CT接线)需在外部完成,微机型差动保护既可以在外部完成,也可在内部完成(外部两侧CT均可接成星型);常规电磁型差动保护电流调平衡是用改变线圈缠绕匝数来完成的,微机型差动保护经过自动计算或输入变压器额定电流值(二次值)即可。
差动保护装置的百分比制动折线一般只应用第一段(SLP1),第二段关闭(SLP2=0FF).比例制动差动保护动作条件:IOP>(SLP1/1OO)*IRT且I0P>087P;如果二次谐波I2>(PCT2/100)*I0P,那么闭锁差动保护。
即差流大于一定比例的制动电流且差流大于差动启动值(差动门槛),差动保护动作。
但二次谐波较大时,闭锁差动保护(主要是考虑励磁涌流)。
差动速断保护动作条件:I0PXJ87P。
一般来说,差动速断启动值要大于可能出现的励磁涌流最大值。
其中:IOP为经过星三角变换与幅值调平衡后的上下压侧差流标么值,IRT为经过星三角变换与幅值调平衡后的制动电流标么值,12为二次谐波标么值。
计算公式:IOP=Ih+Il IRT=(|lh| + |ll|)/2上式Ih、H为经过星三角变换与幅值调平衡后的上下压侧电流标么值,差流计算为相量运算后取模(幅值),制动电流为上下压侧幅值相加再除以二。
电动机的差动保护原理
电动机的差动保护是一种用于检测电机绕组内部故障的保护机制。
它主要通过比较电机的输入和输出电流,以识别任何不平衡或差异,从而检测绕组内可能存在的故障。
以下是电动机差动保护的基本原理:
差动电流原理:
差动保护的核心是基于电流的比较。
在正常运行条件下,电机的输入电流等于输出电流。
当电机绕组内发生故障时(例如,绕组短路),输入和输出电流之间会出现差异。
差动继电器:
为了实现差动保护,通常会使用差动继电器。
这种继电器通过比较电流变化来判断是否存在故障。
差动继电器通常有两个输入,分别连接到电机的输入和输出端。
它监测这两个电流信号之间的差异。
零序电流:
在差动保护中,常常考虑到零序电流。
零序电流是指通过电机绕组外部的电流,它可能是由于接地故障引起的。
差动继电器通常也会监测零序电流,以区分内部故障和外部故障。
设定值和灵敏度:
差动保护系统需要根据具体的电机特性和运行条件进行设定。
这包括设置差动继电器的动作值和调整其灵敏度,以确保在出现故障时及时切断电机。
可靠性和选择性:
差动保护系统必须既要确保对内部故障的高灵敏度,又要保证对外部影响的抗干扰能力。
同时,系统需要具备可靠性,确保在故障发生时可靠地触发保护动作,防止故障扩大。
差动保护的应用范围:
差动保护主要应用于大型电机和发电机等对电力系统可靠性要求较高的设备。
对于小型电机,通常使用过载保护和短路保护等常规保护手段。
总的来说,电动机的差动保护通过监测输入和输出电流的差异来检测内部故障,是电机保护系统中重要的一部分。
国电南自Q/标准备案号:708-2007PSM 691U/692U电动机综合保护装置说明书国电南京自动化股份有限公司GUODIAN NANJING AUTOMATION CO.,LTDPSM 691U/692U电动机综合保护装置说明书国电南京自动化股份有限公司2008年11月版本声明本说明书适用于电动机综合保护装置版本产品说明书版本修改记录表* 技术支持电话:(025)-8120传真:(025)-8118* 本说明书可能会被修改,请注意核对实际产品与说明书的版本是否相符* 2008年11月第2版第1次印刷目次1 装置概述................................................ 错误!未定义书签。
2 技术性能及指标.......................................... 错误!未定义书签。
额定电气参数......................................................... 错误!未定义书签。
主要技术指标......................................................... 错误!未定义书签。
环境条件 ............................................................. 错误!未定义书签。
功率消耗 ............................................................. 错误!未定义书签。
过载能力 ............................................................. 错误!未定义书签。
绝缘性能 ............................................................. 错误!未定义书签。
关于差动保护相关参数的描述,帮助大家理解PMC装置差动保护原理。
差动保护装置可用于双绕组变压器、电抗器、发电机、大型电动机以及其它双端设备的电流差动保护。
继电器可适应各种电力变压器连接。
继电器能自动补偿各种连接来获取适用的差动动作量。
差动保护装置的变压器差动保护功能设计了一套可整定的动作电流启动量以及两个百分比制动折线特性。
这样可使继电器设置灵敏,同时使继电器能够在高故障电流情况下区分内部和外部故障。
继电器也提供一种无制动元件来快速清除高值内部故障。
二次和五次谐波闭锁使继电器可通过电流信号中的频率分量来区分由内部故障和由励磁涌流或过励磁引起的差动电流。
谐波闭锁元件具有可整定的门槛。
差动保护装置原理与国内的微机型差动保护原理几乎是一样的,即使是与常规的电磁型比较,原理也是类似,只不过微机型保护的应用更方便。
如:常规电磁型差动保护星三角变换(CT接线)需在外部完成,微机型差动保护既可以在外部完成,也可在内部完成(外部两侧CT均可接成星型);常规电磁型差动保护电流调平衡是用改变线圈缠绕匝数来完成的,微机型差动保护经过自动计算或输入变压器额定电流值(二次值)即可。
差动保护装置的百分比制动折线一般只应用第一段(SLP1),第二段关闭(SLP2=OFF).比例制动差动保护动作条件:IOP>(SLP1/100)*IRT且IOP>O87P;如果二次谐波I2>(PCT2/100)*IOP,则闭锁差动保护。
即差流大于一定比例的制动电流且差流大于差动启动值(差动门槛),差动保护动作。
但二次谐波较大时,闭锁差动保护(主要是考虑励磁涌流)。
差动速断保护动作条件:IOP>U87P。
一般来说,差动速断启动值要大于可能出现的励磁涌流最大值。
其中:IOP为经过星三角变换与幅值调平衡后的高低压侧差流标么值,IRT 为经过星三角变换与幅值调平衡后的制动电流标么值,I2为二次谐波标么值。
计算公式:IOP=Ih+Il IRT=(|Ih|+|Il|)/2上式Ih、Il为经过星三角变换与幅值调平衡后的高低压侧电流标么值,差流计算为相量运算后取模(幅值),制动电流为高低压侧幅值相加再除以二。
WDZ-5231电动机差动保护装置1装置功能WDZ-5231电动机差动保护装置主要用于10KV及以下2000KW及以上三相异步电动机的差动保护,与配套的WDZ-5232电动机保护测控装置共同构成大型电动机的全套保护。
WDZ-5200系列电动机保护装置还包括WDZ-5232电动机保护测控装置、WDZ-5233电动机综合保护测控装置,三者在保护、测控功能的区别见下表所示。
2保护功能及原理2.1电动机状态电动机按照运行状态,有停机态、起动态、运行态之分。
如果I max<0.125I e,电动机处于停机态;电动机原本处于停机态,检测到I max>0.125 I e:如果I max>1.125 I e,认为电动机进入起动态;如果I max ≤1.125 I e ,则认为电动机起动结束,直接进入运行态。
如果电动机处于起动态,检测I max ,如果0.125 I e <I max ≤1.125I e ,则电动机进入运行态;I max <0.125 I e ,则电动机进入停机态。
其中I max 为电动机机端电流最大值。
2.2差动起动元件装置差动速断和比率差动采用突变量起动元件和过流起动元件,当差动电流发生突变或者差动电流的最大值大于相应的过流定值时,起动元件动作并展宽10s ,开放起动继电器。
2.3差动电流制动电流计算公式按照同名端同在一侧的原则,进行差动电流的计算,即为两侧电流的矢量和;制动电流按照两侧电流绝对值和的一半计算。
差动电流:l h I I DI ∙∙+=制动电流:2/)(l h I I HI ∙∙+=2.4 差动速断保护 2.4.1保护动作逻辑框图I da >I cdsdI dc >I cdsdI db >I cdsd2.4.2保护动作判据cdsd I DI>max式中,I cdsd :差动速断保护动作电流整定值(A ) 2.5比率差动保护装置采用三折线比率差动原理,其动作曲线如下图所示,第3折线斜率固定为1。
比率差动保护必须在电动机不在停机态时,方才有效。
DI IsdIcdqd0.5Ie HI3Ie2.5.1 保护动作逻辑框图HI ≤0.5I e DI>I cdqd0.5I e <HI ≤3I eDI-I cdqd >K×(HI-0.5I e CT 断线HI>3I eDI-I cdqd -K×2.5Ie>HI-3I e2.5.2 保护动作判据()⎪⎩⎪⎨⎧>->⨯--≤<-⨯>-≤>ee e cdqd e e e cdqd e cdqd I HI I HI I K I DI I HI I . I HI K I DI I HI I DI 3 35.23 50 5.05.0 式中,I cdqd :比率差动保护动作电流整定值(A )I e :电动机运行额定电流二次值(A )2.6延时CT 断线告警功能延时CT 断线判别逻辑为:六个电流中仅有一个电流小于0.125倍额定电流,且其它五个电流均大于0.125倍额定电流,且连续超过2秒满足此条件,则发出CT 断线告警信号,但不闭锁比例差动。
2.7瞬时CT 断线闭锁功能 CT 断线判别是基于以下假设的:(1) CT 断线不是所有相同时发生的; (2) CT 断线与故障不是同时发生的。
满足下述任一条件不进行CT 断线判别:(1) 起动前某侧最大相电流小于0.2Ie ,则不进行该侧CT 断线判别; (2) 起动后最大相电流大于1.2Ie ;(3)起动后任一侧电流比起动前增加;只有在比率差动元件动作后,才进入瞬时CT断线判别程序,这也防止了瞬时CT断线的误闭锁。
某侧电流同时满足下列条件认为是CT断线:(1)只有一相或二相电流为零;(2)其它二相或一相电流与起动前电流相等;通过控制字投入或退出瞬时CT断线可闭锁比率差动。
2.8磁平衡差动保护通常的基于电流平衡原理的电动机差动保护,在电动机自起动和外部短路暂态过程中,由于两侧电流互感器对穿越性暂态电流的传变特性不一致,产生不小的暂态不平衡差动电流,造成差动保护误动。
现场机端CT和中性侧CT二次电缆可能长度不一致,甚至相差很大,造成CT二次负载相差较大,出现电流传变特性不一致,产生一定的不平衡差动电流,造成差动保护误动。
磁平衡差动保护三相接线如下所示,电动机每相绕组的始端(机端)和终端(中性侧)引线分别入、出磁平衡电流互感器TA0的环形铁芯。
在电动机正常运行或外部短路时,各相始端和终端电流一进一出,互感器一次安匝为零,二次无输出,保护不动作。
由此可见,在电动机没有发生相间短路的情况下,依靠互感器一次励磁安匝的磁平衡,互感器二次侧没有不平衡电流,从而彻底根除电动机自起动和外部故障短路暂态过程中的误动作。
T A0T A0T A0磁平衡差动保护装置需要和专用磁(自)平衡CT配合使用,从中性侧三相电流接入。
此时传统差动保护不再使用。
2.8.1 保护动作逻辑框图I al >I cphI cl >I cphI bl >I cph2.8.2保护动作判据⎪⎩⎪⎨⎧>>cphcphl t t I I max 式中,I lmax :磁平衡A 、B 、C 相电流(I al ,I bl ,I cl )最大值(A )I cph :磁平衡差动保护动作电流整定值(A ) t cph :磁平衡差动保护动作时间整定值(s )2.9保护定值2.10 软压板装置提供软压板功能,在进行软压板投退过程中,会产生软压板虚拟遥信变位信息。
3 背板端子和接线原理图3.1模拟量输入I ah 、I bh 、I ch 为电动机机端三相保护电流,有额定5A 和1A 之分。
I al 、I bl 、I cl 为电动机中性侧三相保护电流,有额定5A 和1A 之分。
如果为磁平衡保护,此电流从磁平衡CT 引入,为保证精度,一般选择二次CT 额定为1A 。
3.2背板端子从装置前面看,背板端子最左边为插槽1,最右边为插槽5,中间分别为插槽2、插槽3、插槽4。
从装置背面看,最右边为插槽1,最左边为插槽5。
端子编号为3位数,如“ABC”,第一位A为插槽序号,第二三位BC为自上而下端子的序号。
如插槽3的第1个端子,编号为301。
插槽1:模入板端子101~102为电动机机端保护A相电流输入。
端子103~104为电动机机端保护B相电流输入。
端子105~106为电动机机端保护C相电流输入。
端子107~108为电动机中性侧保护A相电流输入或磁平衡A相电流输入。
端子109~110为电动机中性侧保护B相电流输入或磁平衡B相电流输入。
端子111~112为电动机中性侧保护C相电流输入或磁平衡C相电流输入。
插槽2:空板插槽3:出口板端子301~304为保护联跳输出。
301~302为其中一副接点输出;303~304为其中另一幅接点输出。
端子305~308为开出2出口。
305~306为其中一副接点输出;307~308为其中另一幅接点输出。
端子309~310为保护跳闸出口。
端子311~312为开出4出口。
端子313~314为开出5出口。
端子325~326为装置故障告警信号输出。
端子327~328为保护跳闸信号输出。
端子329~330为保护告警信号输出。
端子331~332为动作告警信号输出,当保护动作或保护告警时,此信号输出。
插槽4:接口板端子401~402为现场总线1输入,401为正极性,402为负极性。
可选择CAN、ProfiBus网络接口。
端子403为信号地。
端子404~405为现场总线2输入,404为正极性,405为负极性。
可选择CAN、ProfiBus网络接口。
端子406~407为GPS对时输入端口,接485差分电平。
端子408为信号地。
装置接地螺柱必须和现场接地网可靠连接。
插槽5:电源板端子503~504为装置电源输入,装置电源可选择交直流220V或直流110V。
503为装置电源负输入端,504为装置电源正输入端。
端子506~530为24路强电直流110V或220V开入。
506为开入公共负端,507~530为24路开入输入。
端子531~532为装置闭锁输出,常闭接点。
装置24V失电或内部CPU不正常工作,接点闭合。
3.3 端子接线原理图 3.3.1模拟量输入接线原理图中保流电护侧性机流电回端侧护电流保路3.3.2开入、开出、中央信号、网络回路接线原理图开入16开入21开入公共端开入23开入24开入22开入17开入18开入19开入20小母线开入10开入11开入12采集开入13开入14开入15装置L/DC+L/DC-源遥开入1开入4开入5开入6开入7开入2开入8开入9信量电空气开关装置闭锁中装置故障动作告警信号号信保护动作保护告警央开入3保护联跳开出2开出4开出5保护跳闸跳闸合出口络GPS对时现场总线2通讯网GPS-信号地信号地NET2-AGPS+NET2-BNET1-BNET1-A现场总线14 装置选型1:CAN 网络1:直流电源110V2:直流电源220V1:二次电流In 1A5:二次电流In 5A 2:ProfiBus 网络(1)装置网络通讯接口可选配CAN 、ProfiBus ,均为双网配置;如果需要选配RS485接口,请特殊说明;(2)装置开入电源有直流110V 和直流220V 之分;装置电源不区分110V 和220V ,也不区分交流和直流;(3)装置保护电流二次额定值有1A 和5A 之分;(4)装置可扩展开入、开出资源,请特殊说明;(5)装置无测控功能,不配置4~20mA 输出和硬件电能板;也不配置操作回路。
5 整定说明5.1 重要提示本整定说明仅供参考。
5.2差动保护 5.2.1 差动速断电流I cdsd按躲过电动机起动时的最大不平衡电流计算:max unb rel cdsd I K I =式中,K rel :可靠系数,取2I unbmax :电动机起动时最大不平衡电流,一般不超过2I e ,取2I eI e :电动机额定电流,二次值(A )可取I cdsd =(4~5)I e5.2.2 最小动作电流I cdqd按躲过电动机正常运行时的最大不平衡电流计算:e er ap rel umb rel cdqd I K K K I K I ==式中,K rel :可靠系数,取2K ap :外部短路故障切除时引起电流互感器误差增大的系数,即非周期分量,取1.5K er :电流互感器综合误差,取0.1可取I cdqd =(0.3~0.4)I e5.2.3 比率制动系数K可取K=0.4~0.55.3磁平衡差动保护 5.3.1 磁平衡差动动作电流I cph按躲过电动机起动时的最大不平衡电流计算: e st er rel unb rel cph I K K K I K I ==max式中,K rel :可靠系数,取2K er :电动机两侧磁不平衡误差,取0.5% K st :电动机起动电流倍数,可取6~7 可取I cph =(0.06~0.12)I e5.3.2 磁平衡差动动作时间t cph一般可取t cph =0。