民航客机驾驶杆操纵机构脱开力仿真研究
- 格式:doc
- 大小:26.50 KB
- 文档页数:6

摘要从国内外模拟机市场看,民航维护模拟机分2D维护训练器、3D综合维护训练器和固定式维护模拟机三种类型,考虑到航空企业高级机型培训的需求,需要升级已研制的3D综合维护训练器为固定式维护模拟机,该固定式维护模拟机的驾驶舱采用半实物仿真方式,其硬件仿真方法包括硬件设计、软件设计和通讯设计三部分。
硬件设计采用控制部分和显示部分分离的原则,将驾驶舱按区域划分,每一区域由一块控制板和多块显示面板组成,各区域的控制板可以互相通信。
硬件部分包括仿真驾驶舱所有面板以及面板上所有元件,难点是部分元件同时具备多种功能,难以仿制。
软件设计采用模块化和多文件结构设计思想,将软件结构按功能进行模块划分,每一模块由多个文件组成,单个文件均有接口函数,方便彼此调用。
包括设计和编写所有单片机中的控制程序,完成面板上动作信息采集以及控制相应显示信息。
通讯设计采用CAN总线结构,将各区域主控板通过CAN总线连接成一个CAN网络,设计通信协议,针对总线处理报文冲突的方法中存在低优先级报文延时的问题,采用优先级动态提升方法解决。
关键字:驾驶舱;硬件仿真;CAN总线;维护模拟机AbstractCivil aviation maintenance simulator is classified into 2D maintenance trainer, 3D comprehensive maintenance trainer and fixed maintenance simulator in home and abroad simulator market, considering the requirements of advanced type training of aviation enterprise, the 3D comprehensive maintenance trainer need to be upgraded to fixed maintenance simulator, its flight deck is simulated by semi-physical ,and the hardware simulation methods include hardware design, software design and communication design.Hardware design obeys the principle of setting control part and displaying part separated, flight deck is divided by region, each region contain one control board and some displaying panels, every control board could communicate with each other. Hardware part includes simulating all the panels and elements on panels of flight deck; it is difficult to simulate some elements which is multi-function.Software design use modularization and multi-file structure, software structure is divided into modules by function, each module contains some files, and each file has its own interface function for calling. Software part includes designing and programming the control program of single chip microcomputer, to collect action information on panel and control corresponding display information.Communication design use CAN bus structure, each control board is connected into a CAN network, it also contain designing communication protocol, there is conflict of competition in transmission processes, and however, low priority packet delay in the method of CAN bus process packet confliction. In view of this question, priority dynamic proving algorithm is used to solve the problem.Keywords: flight deck; hardware simulation; CAN bus; maintenance simulator目录摘要 (I)Abstract (II)第一章绪论 (1)1.1课题研究的背景 (1)1.2维护模拟机的国内外研究现状 (1)1.3课题的意义 (2)1.4本文研究的主要内容 (3)第二章驾驶舱仿真方案研究 (4)2.1系统整体设计要求 (4)2.2系统整体结构 (4)2.3硬件仿真方案 (5)2.4系统智能节点软件方案设计 (6)2.5分布式网络通信方案 (7)2.5.1RS485总线 (7)2.5.2ARINC429总线 (7)2.5.3CAN总线 (8)2.5.4总线方案比较 (9)2.6本章小结 (10)第三章系统硬件结构设计与实现 (11)3.1面板级设计方案 (11)3.2显示面板结构设计 (11)3.2.1信号处理智能控制板设计 (12)3.2.2加固钢板设计 (13)3.2.3透光有机玻璃面板结构设计 (14)3.2.4表层显示信息板设计 (14)3.3主控板电路模块设计 (14)3.3.1中央控制模块芯片选型 (15)3.3.2动作信息检测及显示控制模块 (23)3.3.3系统供电模块 (24)3.3.4通信模块 (24)3.4单元节点设计方案实现举例 (25)3.4.1遮光板控制电路实现 (25)3.4.2遮光板显示面板实现 (27)3.5抗干扰技术 (28)3.5.1主要干扰分析 (28)3.5.2硬件抗干扰设计 (29)3.5.3软件抗干扰设计 (29)3.6本章小结 (30)第四章系统智能控制板软件设计 (31)4.1主控程序结构设计 (31)4.2通信方案设计与实现 (32)4.2.1CAN报文结构介绍 (32)4.2.2通信协议设计 (33)4.2.3报文传输实现 (34)4.3数据传输冲突解决方法 (35)4.3.1报文优先级动态提升算法 (36)4.3.2该算法的应用 (38)4.4本章小结 (38)结论 (39)致谢 (40)参考文献 (41)作者简介 (44)第一章绪论1.1课题研究的背景民航业是国民经济的重要基础产业,是综合交通运输体系的有机组成部分,其发达程度体现了国家的综合实力和现代化水平。

摘要通过对某型飞机纵向操纵系统组成、结构及功能分析,将系统分布参数集中化处理,利用等效动态模型法建立了从电动舵机到舵面的数学模型。
在MATLAB环境下以模块化方法进行系统仿真,得到与实际系统静态、动态响应相吻合的仿真模型。
将此模型等效降阶成二阶模型,结合飞机纵向运动方程及飞行控制律,得到飞机飞行状态的动态响应,这个响应与真实情况更加接近。
此模型可应用于调整飞机自动驾驶仪参数和评价飞机飞行品质。
关键词:操纵系统;故障分析;建模;仿真Modelingand Simulation of VehicleControl SystemAbstract:Acomplet emathematicalmodel of a vehicle control system form ElectromechanicalActuatorto Elevator isestablished afteranalyzing theElevatormechanicalstructureof it.Wemodeled itbymeansofcentralizing thedistributed system parametersand establishing itwith dynamicmodeling.ByusingMatlab?Simulink, the simulation results show that themodel is identical to the realone in both static and dynamicperformance. Thepracticalhighorder system model isequivalent to a low ordermodel. Combiningwith theAircraft lognitudinal state equation and the flight control law,amore reliable response of the autonomousflight can be gotten. Themodel isvaluable to the analysisof theparamtersof the flight control law and theflight quality.Key words:vehicle control system,dynamicequivalentmodel,modeling,simulation引言在飞机设计阶段,为了考察飞机操纵系统对飞机自动驾驶仪参数的影响,需要建立完整的飞机飞行操纵系统数学模型。


飞行模拟器主操纵机构的仿真设计(全文) 摘要:基于对飞行模拟器主操纵机构的仿真设计及实际应用条件,着重分析了主操纵机构设计中主要构件和力的传递方式,对操纵联动过程中各绞点产生的误差进行分析,并对如何减小累计误差进行了的论述,另对主操纵机构的参数化设计和虚拟装配技术的应用进行了简单的介绍。
关键词:主操纵机构仿真设计误差分析虚拟装配参数化设计V217 A 1007-3973(2022)006-098-021 引言飞机的主操纵机构用于控制飞机飞行轨迹和姿态,由升降舵、副翼和方向舵的操纵机构组成。
在航空模拟器中,主操纵机构的准确定位和操纵性直接影响到模拟器的飞行品质和飞行员的受训质量,所以,主操纵机构的仿真设计在整个模拟器研制过程中非常重要。
飞行模拟器主操纵机构是操纵系统中一个很重要的机构,设计时需要考虑的因素较多,不仅需要考虑功能方面的要求,还需考虑强度、刚度等方面的要求,从而导致其设计难度较大。
现代设计系统的一个主要要求在于已有设计的可再使用性,所以解决该问题的有效方法之一就是采用知识驱动的设计方案,建立先进的设计平台。
这不仅可以提高产品质量,缩短研制周期,降低设计成本,而且对减轻劳动强度也是十分有益的。
2 仿真设计飞行模拟器操纵系统由主操纵机构、辅助操纵机构、操纵负荷系统等部分组成。
主操纵机构由驾驶杆、脚蹬机构、连杆机构和摇臂机构组成。
2.1 主操纵机构主要构件的分析主操纵机构的传动机构通常分为软式、硬式和混合式三种。
其中硬式传动机构主要由摇臂和传动杆等构件所组成。
2.1.1 摇臂摇臂主要用来传递力、位移或改变它们的大小和方向,有的仅作支撑用。
结构形式通常包括单摇臂、双摇臂和复合式摇臂。
2.1.2 传动杆传动杆又称拉杆,由两端耳片接头(或耳环螺栓)和管材组成。
通常把一端或两端耳片接头设计成螺纹连接,便于微调杆长,进行系统装配。
2.2 主操纵机构传动比的计算与分析以驾驶杆做俯仰运动的行程为例进行计算与分析。
飞机六自由度模型及仿真研究一、本文概述随着航空工业的快速发展和飞行器设计的日益复杂化,对飞机动力学特性的理解和分析变得越来越重要。
其中,飞机的六自由度模型是理解和分析飞机动力学特性的基础工具。
本文旨在深入探讨飞机六自由度模型的建立过程,以及基于该模型的仿真研究。
我们将首先介绍飞机六自由度模型的基本概念和理论框架,然后详细阐述模型的建立过程,包括动力学方程的推导、运动学方程的构建以及控制逻辑的设计。
在此基础上,我们将展示如何利用该模型进行仿真研究,包括飞行轨迹的模拟、飞行稳定性的分析以及飞行控制策略的优化等。
我们将总结飞机六自由度模型及仿真研究的重要性,并展望未来的研究方向和应用前景。
本文的目标读者包括航空工程领域的学者、工程师以及研究生,希望通过本文的阐述,能够帮助读者更好地理解和掌握飞机六自由度模型及仿真研究的相关知识和技术。
我们也希望本文的研究能够对飞行器设计、飞行控制以及飞行安全等领域的发展提供一定的理论支持和实践指导。
二、飞机六自由度模型建立在飞行动力学中,飞机的运动可以分解为六个自由度:三个沿坐标轴的平动(纵向、横向和垂直)和三个绕坐标轴的转动(滚转、俯仰和偏航)。
六自由度模型的建立是飞行仿真研究的基础,它能够全面、准确地描述飞机的空间运动特性。
我们需要定义飞机的坐标系和参考坐标系。
通常采用机体坐标系来描述飞机的姿态和运动,而地面坐标系或惯性坐标系则用于描述飞机的位置和速度。
在机体坐标系中,飞机的滚转、俯仰和偏航运动可以通过欧拉角来描述。
接下来,根据牛顿第二定律和动量矩定理,建立飞机的运动方程。
这些方程包括沿三个坐标轴的平动方程和绕三个坐标轴的转动方程。
平动方程描述了飞机的加速度与所受合力的关系,而转动方程则描述了飞机的角加速度与所受合力矩的关系。
在建立运动方程时,需要考虑飞机的质量、质心位置、惯性矩等参数,以及作用在飞机上的各种力(如重力、推力、升力、阻力等)和力矩(如滚转力矩、俯仰力矩、偏航力矩等)。
飞机操纵系统驾驶杆力大故障分析摘要:通过对飞机操纵系统驾驶杆力大故障的调查及产生原因的分析。
为设计及工艺方法的改进提出合理话建议,从而提高飞机的制造质量。
关键词:操纵系统;操纵力一、引言飞机操纵系统是控制飞机气动操作面,改变飞机气动布局,增强飞行稳定性,改善操纵品质和优化飞行性能的装置。
飞机操纵系统是飞机的重要组成部分,它的工作性能是否良好,直接影响到飞机性能的发挥和飞行安全。
检测飞机驾驶杆操纵力时,发现纵向拉驾驶杆到极限位置时驾驶杆力比要求规定的最大力大了17N。
而且对多架飞机检测,驾驶杆力全部超差。
二、原理分析1.1 故障原因飞机平尾操纵系统提供飞机的纵向操纵。
平尾操纵系统为无回力液压助力操纵系统,系统由座舱驾驶杆、力臂调节装置、平尾载荷机构、调整片效应机构、复合摇臂、液压平尾助力器、平尾限动器、助力器后段、平尾角位移传感器以及由拉杆和摇臂构成的机械传动链组成。
平尾操纵系统为机械硬式无回力助力操纵系统。
从驾驶杆至平尾的操纵线系上,由拉杆、摇臂、载荷机构、调效机构、助力器等诸多机械环节串连组成。
每个环节工作不正常都会对整个系统的操纵力造成很大的影响。
在实践当中,这些环节都曾出现过故障,对系统性能的影响也各种各样,认真分析系统的原理、组成、安装生产过程,根据多次实际调试的经验,分析系统的原理、组成、安装生产过程,造成该故障的主要原因有以下几个方面:1.拉杆、摇臂卡滞;2.带轴承的运动关节部位运动不灵活;3.载荷机构内部问题;4.助力器故障。
1.2 故障验证对以上原因依次进行验证,并做出判定。
1. 拉杆、摇臂卡滞针对飞机对平尾操纵系统各部位拉杆、摇臂之间间隙及可能存在的多余物进行了检查,并对轴承等关键部位进行了润滑。
在做了这些工作后再测驾驶杆力,发现驾驶杆力有点变小,但是不明显,还是不符合要求。
为了彻底的查出力大的原因,在多架飞机上作了如下的测量:1.飞机完整状态测驾驶杆极限力、极限位置摩擦力、中立位置摩擦力;2.将驾驶舱的固定飞控电缆完全松弛,测驾驶杆极限力、极限位置摩擦力、中立位置摩擦力;3.将机身口盖全部打开测量,测驾驶杆极限力、中立位置摩擦力、极限位置摩擦力,测量数据见下表。
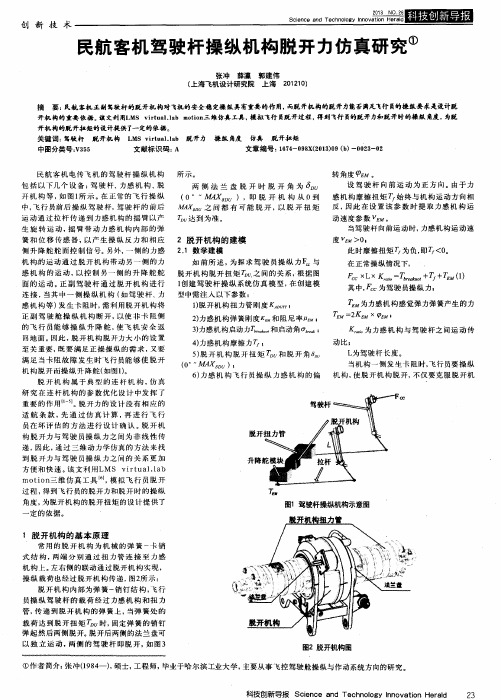
民航客机驾驶杆操纵机构脱开力仿真研究
摘要:民航客机正副驾驶杆的脱开机构对飞机的安全稳定操纵具有重要的作用,而脱开机构的脱开力能否满足飞行员的操纵要求是设计脱开机构的重要依据。
该文利用LMS b motion三维仿真工具,模拟飞行员脱开过程,得到飞行员的脱开力和脱开时的操纵角度,为脱开机构的脱开扭矩的设计提供了一定的依据。
关键词:驾驶杆脱开机构LMS b 脱开力操纵角度仿真脱开扭矩
民航客机电传飞机的驾驶杆操纵机构包括以下几个设备:驾驶杆、力感机构、脱开机构等,如图1所示。
在正常的飞行操纵中,飞行员前后操纵驾驶杆,驾驶杆的前后运动通过拉杆传递到力感机构的摇臂以产生旋转运动,摇臂带动力感机构内部的弹簧和位移传感器,以产生操纵反力和相应侧升降舵舵面控制信号。
另外,一侧的力感机构的运动通过脱开机构带动另一侧的力感机构的运动,以控制另一侧的升降舵舵面的运动。
正副驾驶杆通过脱开机构进行连接,当其中一侧操纵机构(如驾驶杆、力感机构等)发生卡阻时,需利用脱开机构将正副驾驶舱操纵机构断开,以使非卡阻侧的飞行员能够操纵升降舵,使飞机安全返回地面。
因此,脱开机构脱开力大小的设置至关重要,既要满足正操操纵的需求,又要满足当卡阻故障发生时飞行员能够使脱开机构脱开而操纵升降舵(如图1)。
脱开机构属于典型的连杆机构,仿真研究在连杆机构的参数优化设计中发挥了重要的作用[1-5]。
脱开力的设计没有相应的适航条款,先通过仿真计算,再进行飞行员在环评估的方法进行设计确认。
脱开机构脱开力与驾驶员操纵力之间为非线性传递,因此,通过三维动力学仿真的方法来找到脱开力与驾驶员操纵力之间的关系更加方便和快速。
该文利用LMS b motion三维仿真工具[6],模拟飞行员脱开过程,得到飞行员的脱开力和脱开时的操纵角度,为脱开机构的脱开扭矩的设计提供了一定的依据。
1 脱开机构的基本原理
常用的脱开机构为机械的弹簧-卡销式结构,两端分别通过扭力管连接至力感机构上。
左右侧的联动通过脱开机构实现,操纵载荷也经过脱开机构传递,图2所示:
脱开机构内部为弹簧-销钉结构,飞行员操纵驾驶杆的载荷经过力感机构和扭力管,传递到脱开机构的弹簧上,当弹簧处的载荷达到脱开扭矩时,固定弹簧的销钉弹起然后两侧脱开。
脱开后两侧的法兰盘可以独立运动,两侧的驾驶杆即脱开,如图3所示。
两侧法兰盘脱开时脱开角为(0°~),即脱开机构从0到之间都有可能脱开,以脱开扭矩达到为准。
2 脱开机构的建模
2.1 数学建模
如前所述,为探求驾驶员操纵力与脱开机构脱开扭矩之间的关系,根据图1创建驾驶杆操纵系统仿真模型,在创建模型中需注入以下参数:
1)脱开机构扭力管刚度;
2)力感机构弹簧刚度和阻尼率;
3)力感机构启动力和启动角;
4)力感机构摩擦力;
5)脱开机构脱开扭矩和脱开角(0°~);
6)力感机构飞行员操纵力感机构的偏转角度。
设驾驶杆向前运动为正方向。
由于力感机构摩擦扭矩始终与机构运动方向相反,因此在设置该参数时提取力感机构运动速度参数。
当驾驶杆向前运动时,力感机构运动速度>0;
此时摩擦扭矩为负,即<0。
在正常操纵情况下,
×L×=++(1)
其中,为驾驶员操纵力;
为力感机构感觉弹力弹簧产生的力=2×;
为力感机构与驾驶杆之间运动传动比;
L为驾驶杆长度。
当机构一侧发生卡阻时,飞行员要操纵机构,使脱开机构脱开,不仅要克服脱开机构的脱开扭矩,还要考虑单侧非卡阻侧力感机构带来的杆力,因此
×L×=++±*×(±*)(2)
如果操纵方向为驾驶杆回中方向,力感机构弹簧力则帮助飞行员脱开,那么人所需的力将减少(公式1中*处为负号);反之则力增大(公式1中*处为正号)。
2.2 仿真建模
根据上面的数学模型,可以看出,在仿真求解卡阻状态下的时,需根据式(2)来设置以下变量有:脱开机构脱开角、卡阻时操纵方向(即回中方向或极限位方向)、卡阻时的升降舵模块位置。
所建立的三维仿真模型如图4所示。
3 仿真及结果分析
由于脱开机构脱开角在0°~之间都有可能脱开,因此选取0°,,,,五个可能的脱开角进行仿真。
卡阻时的力感机构位置由卡阻时驾驶杆的位置决定,根据AC-671DRAFT,飞机正常起飞和着陆情况下发生卡阻时将处于最危险的状态。
因此可选取以下卡阻点:中立位置,前极限位置,后极限位置,正常起飞时卡阻位置,正常着陆时卡阻位置。
力感机构刚度和阻尼通过扭转弹簧设置,同时也可叠加启动扭矩摩擦扭矩,以实现力感机构的机械特性设置;脱开机构扭力管刚度利用扭转弹簧进行模拟;脱开机构脱开力矩也通过扭转弹簧模拟,其刚度为=/。
在进行仿真时先设定卡阻位置和,然后在驾驶杆端施加垂直于驾驶杆的操纵力,观察脱开机构扭装弹簧的扭矩达到时驾驶杆操纵力的数值。
改变、及驾驶杆操纵方向,得出一系列,在各个点之间线性插值,得出FCC-的关系,结果如图5所示。
4 结语
通过以上分析得出驾驶杆(力感机构)在不同位置时的脱开力,由飞行员在工程模拟器上进行在环评估,确定脱开力是否合适。
进而确定脱开机构脱开扭矩,为脱开机构的设计提供载荷输入。
参考文献
[1]李苏红,刘记.基于CATIA V5的四连杆机构参数化设计及其运动仿真[J].长春理工大学学报,2009(6):181-183.
[2]杨绿云,郭飞.基于simmechanics的六杆机构动力学仿真[J].华北水利水电学院学报,2010(8):86-88.
[3]叶铁丽,李民,刘欣丽.液压支架四连杆机构优化设计及运动仿真[J].煤矿机械,2009(5):37-39.
[4]崔利杰,龚小平.基于COSMOSMotion运动仿真的平面多连杆机构优化设计[J].机械与电子,2007(8):10-12.
[5]朱延飞,王刚,姚养无.平面组合连杆机构的多目标优化设计及仿真[J].火炮发射与控制学报,2008(12):94-96.
[6]万晓峰,刘岚.LMS b Motion入门与提高[M].西北工业大学出版社.。