机械原理课件之四杆机构受力分析.共30页文档
- 格式:ppt
- 大小:2.68 MB
- 文档页数:155
第五章 平面连杆机构及其设计 §5-1平面连杆机构的应用及传动特点§5-2平面四杆机构的类型和应用§5-3平面四杆机构的一些共性问题§5-4 平面四杆机构的设计1)低副便于加工、润滑;构件间压强小、磨损小、承载能力大、寿长;2)连杆机构型式多样,可实现转动、移动、摆动、平面复合运动等运动形式间的转换。
如:锻压机肘杆机构,单侧曲线槽导杆机构,汽车空气泵,可变行程滑块机构,等。
一、平面连杆机构的优点和应用平面连杆机构:各构件全部用低副联接而成的平面机构(低副机构).例如:四足机器人(图片、动画)、内燃机中的曲柄滑块机构、汽车刮水器、缝纫机踏板机构、仪表指示机构等。
曲柄滑块机构摆动导杆机构常见平面连杆机构:铰链四杆机构(雷达天线,飞剪,搅拌机)锻压机肘杆机构可变行程滑块机构3)可用于远距离操纵、重载机构,如:自行车手闸机构,挖掘机等。
4)连杆曲线丰富,可实现特定的轨迹要求,如:搅拌机构,鹤式起重机等。
挖掘机搅拌机构鹤式起重机二、平面连杆机构的缺点1)运动副中的间隙会造成较大累积误差,运动精度较低。
2)多杆机构设计复杂,效率低。
3)多数构件作变速运动,其惯性力难以平衡,不适用于高速。
多杆机构大都是四杆机构组合或扩展的结果。
本章介绍四杆机构的分析和设计。
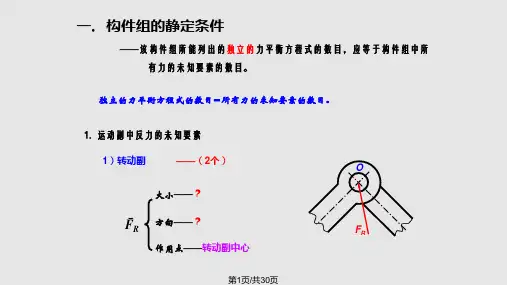
六杆机构及六杆机构的实际应用一、 铰链四杆机构的基本型式和应用铰链四杆机构:全部用回转副联接而成的四杆机构。
连架杆——与机架相联的构件;周转副——组成转动副的两个构件作整周相对转动的转动副;曲柄1——作整周定轴回转的构件;摇杆3——作定轴摆动的构件;转动副摆转副(C、D)周转副(A、B)铰链四杆机构分为:曲柄摇杆机构、双曲柄机构和双摇杆机构。
1.曲柄摇杆机构铰链四杆机构中,若两连架杆中有一个为曲柄,另一个为摇杆,则称为曲柄摇杆机构。
实现转动和摆动的转换。
雷达天线俯仰机构缝纫机踏板机构应用(动画演示):雷达天线俯仰角调整机构,飞剪机构,搅拌机构,摄影机抓片机构、缝纫机踏板机构等。

机械原理机构力分析在机械工程的领域中,机构力分析是一项至关重要的任务。
它不仅有助于我们理解机械系统的工作原理,还能为机构的设计、优化和性能评估提供关键的依据。
要理解机构力分析,首先得明白什么是机构。
机构是由若干个构件通过运动副连接而成的具有确定相对运动的组合体。
这些构件在力的作用下运动,而力的作用效果直接影响着机构的性能和工作效率。
机构力分析的目的主要有两个方面。
一方面是确定机构中各个构件所受的力和力矩,从而为构件的强度设计和尺寸确定提供依据。
另一方面,通过力分析可以了解机构的动力性能,比如功率消耗、速度变化等,为机构的优化和改进提供方向。
在进行机构力分析时,我们通常需要考虑几种不同类型的力。
首先是驱动力,这是使机构运动的主动力,通常由电机、内燃机等动力源提供。
然后是工作阻力,它是机构在完成工作任务时所克服的力,例如起重机吊起重物时所承受的重力。
此外,还有摩擦力,这是由于构件之间的相对运动而产生的阻力,会消耗能量并影响机构的效率。
为了进行有效的力分析,我们需要运用一些基本的力学原理和方法。
比如,牛顿第二定律告诉我们,力等于质量乘以加速度。
对于机构中的构件,我们可以通过分析其加速度来确定所受的力。
还有达朗贝尔原理,它将动力学问题转化为静力学问题,使得分析更加简便。
让我们以一个简单的四杆机构为例来看看力分析的具体过程。
假设有一个由四根杆通过铰链连接而成的四杆机构,其中一根杆作为驱动杆,通过一个旋转电机提供动力。
首先,我们需要确定机构的运动学参数,比如各个杆的长度、关节的位置以及运动的速度和加速度。
然后,根据这些参数,利用力学原理计算出各个杆所受的力和力矩。
在实际的机械系统中,机构往往更加复杂,可能包含多个运动副、多个构件以及各种复杂的力和约束条件。
这时候,我们可能需要借助计算机辅助分析软件来进行精确的计算和模拟。
机构力分析对于机械设计的重要性不言而喻。
通过准确的力分析,我们可以合理地选择材料,确保构件在工作过程中不会因为受力过大而发生破坏。
四杆机构的条件:最短杆长度+最长杆长度其余两杆长度之和
组成该周转副的两杆中必有一杆为最短杆。
最短杆为连架杆,为曲柄摇杆机构,最短杆为几架时,为双曲柄机构。
死点:1)采用两组以上的相同机构组合使用,使各组机构的死点相互错开排列的方法2)采用安装飞轮加大惯性的方法,借惯性作用闯过死点。
传递功率范围大,传动效率高,传动比准确,使用寿命长,工作可靠。
分度圆直径d=mz 齿顶高ha=ha*m h*=1 c*=0.25
齿根高hf=(ha*+c*)m 齿全高h1=(2h*+c*)m
齿顶圆直径da=(z1+2h*)m 齿根圆直径Df=(z1-2h*-2c*)m
基圆直径Db=d1cosa 齿距p=πm
基圆齿距Pb=pcosa 齿厚s=πm/2
齿槽宽e=πm/2顶隙c=c*m m1=m2=m B12=-B2 a1=a2=a 标准中心距a=m(z1 +z2 )/2 节圆直径d =d
传动比i =w 1/w2 =z2 /z1 cos20 =0.9396
一次多项式:刚性冲击二次多项式:柔性冲击中速轻载
五次多项式:无刚无柔高速中载
余弦加速度:中低速重载正弦加速度:中高速度轻载
等速运动:低速轻载
机构原动件数小于机构自由度,机构运动不确定,原动件数大于机构自由度,机构的最薄弱的环节损坏
1.发生线上线段长度等于基圆上滚过的弧长
2.渐开线上任意一点恒与基圆相切
3.发生线与基圆的切点也是渐开线在K点的曲率中心
4.渐开线的形状取决于基圆的大小
5.基圆以内无渐开线。