四杆机构构件的受力分析和强度
- 格式:pdf
- 大小:7.01 MB
- 文档页数:50

哈工大(威海)《机械原理》知识点整理整理人:131310405郭勇辰第一章1.机械是机器与机构的总称。
2.机器是一种人为实物组合的具有确定机械运动的装置,用来完成有用功、转换能量或处理信息,以代替或减轻人类的劳动。
3.现代化机器具有四个组成部分:原动机、传动机、执行机构和控制系统。
4.一部机器通常包含一个或若干个机构。
机构是一个具有相对机械运动的构件系统,或称它是用来传递与变换运动和动力的可动装置。
第二章1.构件与零件的区别在于:构件是运动的单元,而零件是制造的单元。
一个构件既可以是一个零件,也可以是由若干零件装配而成的刚性体。
2.运动副:两构件间的直接接触又能产生一定相对运动的活动连接成为运动副。
3.一个运动副引入的约束数目最多只能是5个,最少是1个。
4.运动链:若干构件通过运动副连接而成的构件系统称为运动链。
运动链中各构件首位封闭,则称为闭式链,否则为开式链。
5.机构:如果将运动链中的一个构件固定作为参考坐标系,则这种运动链称为机构。
6.运动副的分类:把引入1个约束的运动副称为Ⅰ级副,以此类推;以面接触的运动副称为低副,以点或线接触的运动副称为高副;如果两运动副元素间只能相互做平面平行运动,则称之为平面运动副,否则为空间运动副;7.不按比例绘制的运动简图成为机构示意图。
8.机构运动简图的单位为m/mm(图纸上1mm所代表的真实长度)。
9.自由度:确定一个构件或机构的运动(或位置)所需的独立参数的数目。
10.机构具有确定运动的条件是:机构的自由度大于零,且机构的原动件数目等于机构的自由度数。
11.计算自由度时注意三种情况:复合铰链、局部自由度、虚约束。
12.复合铰链:由两个以上构件在同一处构成的重合转动副。
13.局部自由度:不影响整个机构运动的自由度。
14. 虚约束:起重复限制作用的约束。
(虚约束的几种情况在P17)15. 三维空间中,一个活动构件具有6个自由度。
16. 任何机构都包含机架、原动件和从动件系统三个部分。
四连杆受力分析不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
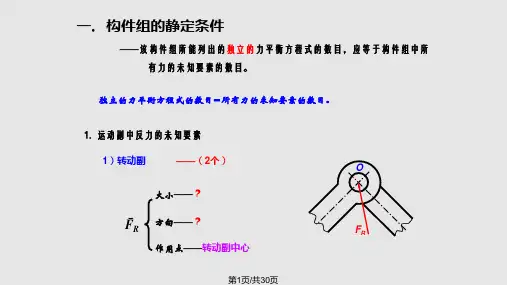
平衡力(矩)一一与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)一一求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)一一求解机构所能克服的生产阻力一.构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.§3-4不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力〉来确定个运动副中的反力和需加于该机构上的平衡力匕由于运动副反力对机构来说是内力*必须将机构分解为若干个杆组,然后依次分析中> + «力*1——占作用于机鋼构件上的已相平飯的未甘外力(E)己知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)| A平衡力(矩)——求解机构所能克服的牛产阻力-构件组的静定条件——轨构件谢所能列岀的m氏的力平術方fiSftftS.10等于构件组中两有力的未知要責的81目"豪亘的力罕对扌程丸的救耳=所韦帶的来知要索的itq。
t运动樹中反力曲未知里秦n转动副——(2个)-丸小---- ?{方為—?作用点卡动副中心2 •构件fin*定条件设某构件组共有沖个构件*几个低副、几个高副>f构件可以列出§个独立的力平鎮方程,科个构件共有為个力平衡方程>一个平面低副引入2个力的未知数,円个低副共引入2円个力的未知数>—个平面高副引入1个力的未知数,几个低副共引入几个力的未知数而当构件组仅有低副时,则为『3归耳绘冷;羞專杆粗那满足鼻直条件二.用图解法作机构的动态静力分析步骤:1)对机构进行运动分析*求出个构件的住及其质心的吗$2)求出各构件的惯性力,并把它们视为外力加于构件上*3)根据静定条件将机构分解为若干个构件组和平衡力作用的构件:4)对机构进行力分析,从有已知力的构件开始,对各构件组进行力分析;5)对平衡力作用的构件作力分析。

连杆受力分析
HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
四连杆受力分析
不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来
确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力
对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
?平衡力(矩)——与作用于机构构件上的已知外力和
惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已
知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)——求解机构所能克服的生产阻力一. 构件组的静定条件——该构件组所能列出的
独立的力平衡方程式的数目.。
四连杆机构原理受力四连杆机构是一种常用的机械传动装置,由四个连杆组成,可以实现复杂的运动轨迹。
在四连杆机构中,各个连杆之间的受力关系是非常重要的,它直接影响到机构的运动特性和稳定性。
我们来看一下四连杆机构中各个连杆的受力情况。
四连杆机构由一个固定连杆、两个活动连杆和一个驱动连杆组成。
固定连杆连接固定点和驱动点,活动连杆连接驱动点和工作点,驱动连杆连接工作点和固定点。
在四连杆机构中,驱动连杆是通过驱动点的力来产生运动的,而活动连杆则转化这个运动,并将其传递给工作点。
在四连杆机构中,各个连杆之间的受力关系是相互影响的。
首先,固定连杆在连接点处受到驱动点的力,这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使固定连杆产生水平方向的拉力,垂直方向的分力使固定连杆产生垂直向上的压力。
这些受力使得固定连杆保持稳定,并且不会发生位移。
接下来,活动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使活动连杆产生水平方向的拉力,垂直方向的分力使活动连杆产生垂直向上的压力。
这些受力使得活动连杆具有一定的刚度,并且可以传递驱动点的力给工作点。
驱动连杆在连接点处同样受到驱动点的力。
这个力可以分解为水平方向和垂直方向的分力。
水平方向的分力使驱动连杆产生水平方向的拉力,垂直方向的分力使驱动连杆产生垂直向上的压力。
这些受力使得驱动连杆能够将驱动点的力传递给工作点,并且实现机构的运动。
四连杆机构中各个连杆之间的受力关系是非常重要的。
固定连杆、活动连杆和驱动连杆都承受着来自驱动点的力,这些力使得连杆产生拉力和压力,并且保持机构的稳定性和运动特性。
在实际应用中,我们需要根据具体情况来选择合适的连杆长度和连接方式,以确保机构的可靠性和性能。
四连杆机构中各个连杆之间的受力关系是非常重要的。
了解这些受力关系可以帮助我们更好地设计和应用四连杆机构,实现所需的运动轨迹和功能。
同时,我们还需要注意机构的稳定性和可靠性,确保机构在工作过程中不会出现失效和故障。
四连杆机构原理受力四连杆机构是一种基础的机械结构,可以将旋转运动转化为线性运动,被广泛应用于各种机械设备中。
在四连杆机构中,受力是非常重要的,下面我们就来探讨一下四连杆机构受力的原理。
1. 受力分析四连杆机构的结构由四个连杆组成,通常分为一个驱动连杆和三个连动连杆。
其受力分析的过程可以被分为两个部分:静力分析和动力分析。
静力分析主要是在定常的状态下,确定各个连杆的内力和外力的大小及方向,以及各个连杆的运动学参数。
而动力分析则是在运动状态下,研究各个连杆的受力情况以及碰撞和推力等因素的影响。
2. 受力原理四连杆机构的受力原理可以用以下四个方面来描述:(1) 动能守恒原理四连杆机构的运动过程中,各个连杆的平动和转动都会涉及到动能的转化。
动能守恒原理指出,系统总动能在运动过程中不变,此原理可用于双脚平地行走机构、可编程整倍增速装置等四连杆机构。
(2) 力平衡原理四连杆机构中任何一点的受力情况必须符合牛顿力学的力平衡原理,受力平衡不仅关系到各个连杆自身的结构强度,也关系到连杆与其它部件之间的协调。
(3) 力谷原理在四连杆机构的运动过程中,随着某一连接点的位置的变化,系统的自身能量会发生改变。
这种变化会使系统处于一个稳态,这种稳态就是力谷。
(4) 傅科定理傅科定理假设四连杆机构中各个连杆都是刚性的,受力直线分布。
在此基础上,劳伦茨原理可以被应用于分析各个连杆的运动学参数。
另外,还有一些其他的受力原理,如弹性原理、脉冲定理等,这些原理同样适用于四连杆机构。
总结:四连杆机构受力原理是四连杆机构设计中的重要一环,能够帮助我们更好地理解其工作原理和机构特点。
在实际应用中,我们还需要结合实际情况综合分析其受力特性,以使机构设计和优化更加准确和高效。
四连杆受力分析不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。
由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
平衡力(矩)一一与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)一一求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)一—求解机构所能克服的生产阻力一.构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.§3-4不计摩擦时机构的受力分析根据机构所受已知外力(包括慣性力)来确定个运动副中的反力和需加于该机构上的平衡力乜由于运动副反力对机构来说足内力,必须将机构分解为若干个杆组,然后依次分析多沪宰術力r«j ——与作用于机已知外力A18K力相平飯的未知外力(更)已知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)■平衡力(矩)——求解机构所能克服的生产阻力r 构件组的静定条件——孩脚件组所能则出的独P 的力平痢疗程式的數目.用等于构件塑中險有力曲未知嬰素的数目。
豪丈首力毕衡方烈丸的it 貝=所有力召来知要盍的撤口 *2)移动副 ——(2个){-大*b ----- ?方向——垂直移动导路 柞用A ——?3)平面高副——(1个)「九 J* ?F ff :方匀一法线I 作用点——挟*k 点2•榔件t 运动聞中反力的未初里索"转动副——(2个)[X.4* ----- ?方甸——?杵用点——转动副中心A设某构件组共有H个构件.丹个低副.几个高副>一个构件可以列出s个独立的力平衡方程,用个构件共有佝个力平衡方程>一个平面低副引入2个力的未知数,的个低副共引入切彳个力的未知数>—个平面高副引入1个力的未知数.几个低副共引入几个力的未知数轲件《Li6奮龙秦件』| 3“匚2巧;耳而当构件组仅有低副时,则为* 3/f = 2P f结怡:空本杆组寿满足#岌条件二.用图解法作机构的动态静力分析步骤:1)对机构进行运动分析,求出个构件的。
工程力学中的平面四杆机构的力学分析工程力学中,机构是指由若干构件组成的结构,能够实现特定功能的装置。
平面四杆机构是一种常见且重要的机构,在众多工程应用中发挥着重要作用。
本文将对平面四杆机构的力学分析进行详细探讨,以便更好地理解和应用于实际工程设计中。
1. 平面四杆机构的定义和基本结构平面四杆机构由四根杆件和若干铰链连接而成,其中两根杆件称为主杆件,另外两根杆件称为从杆件。
主杆件与从杆件分别通过两个固定的铰链连接,形成一个封闭的链环结构。
平面四杆机构的基本结构如图1所示。
[插入图1平面四杆机构的基本结构]2. 平面四杆机构的运动约束条件由于铰链的特性,平面四杆机构具有一定的运动约束条件。
根据实际应用需求,平面四杆机构可以实现以下几种运动:2.1 行走机构行走机构是平面四杆机构的一种常见运动模式,用于实现直线行走。
在行走机构中,主杆件沿着一条直线路径移动,从而驱使从杆件实现步进运动。
该机构常用于工程设备的行走机构中,如履带式输送机等。
2.2 摇摆机构摇摆机构是平面四杆机构的另一种典型运动形式,用于实现往复摆动。
在摇摆机构中,主杆件通过旋转,引导从杆件做往复运动。
摇摆机构广泛应用于水泵、风扇等设备中,实现节律性的液体或气体输送。
2.3 连杆机构连杆机构是平面四杆机构中的一种特殊形式,用于实现固定长短的连杆运动。
主杆件和从杆件的长度可以通过调整来改变杆件的运动轨迹和速度,进而实现对工程装置的精确操控。
3. 平面四杆机构的力学分析方法为了更好地理解和应用平面四杆机构,需要进行力学分析,以确定各杆件之间的力学关系。
以下是常用的几种力学分析方法:3.1 克氏图法克氏图法是一种常用的力学分析方法,利用平面四杆机构的平面图形,推导出杆件之间的运动学方程和力学方程。
通过解这些方程组,可以得到各杆件的位置、速度、加速度以及承受的力。
3.2 动力学分析动力学分析是在运动学基础上,研究机构内各杆件所受力的分布和大小。
通过应用牛顿第二定律和动量守恒定律,可以推导出杆件的受力情况和所需的驱动力。