超声波定位讲解
- 格式:pptx
- 大小:4.55 MB
- 文档页数:15

基于超声波的跟踪定位系统研究在现代社会中,人们需要对移动物体进行实时追踪和定位,以便于进行相关监测和控制操作。
为了实现这个目标,基于超声波的跟踪定位系统成为了一个被广泛研究的领域。
这篇文章主要探讨了基于超声波的跟踪定位系统的研究,包括定位原理、系统设计、算法实现和应用领域等方面。
一、定位原理基于超声波的跟踪定位系统是一种利用声波在空气中的变化进行测距、定位和追踪的技术。
声波是一种机械波,它能够在空气中传播,并在遇到不同密度的物体时发生反射、折射和散射等现象。
这为声波跟踪定位提供了基础条件。
在这种系统中,如何采集声波信号并从中获取有用的信息是至关重要的。
定位原理的核心是测量声波传播的时间差。
在系统中,一组发射器和接收器被放置在目标区域内。
这些发射器将超声波信号发送到目标物体,接收器接收到物体反射回来的声波。
通过测量发射和接收的时间差,可以确定目标物体与接收器之间的距离。
当有多组发射器和接收器组成网络时,可以利用三角定位法计算目标物体的位置。
二、系统设计基于超声波的跟踪定位系统由以下几个部分组成:1. 发射器:负责发射超声波,通常使用压电材料来产生机械振动引起声波发射。
2. 接收器:负责接收目标物体反射回来的声波,并将其转化为电信号。
通常采用压电材料来产生电信号。
3. 时间测量器:负责测量发射器和接收器之间的时间差来确定目标物体与接收器之间的距离。
4. 数据处理器:负责实现测距数据的处理,包括三角定位法的计算。
5. 软件界面:提供用户接口和数据输出,通常使用图形化界面。
三、算法实现基于超声波的跟踪定位系统通常采用三角定位法来计算目标物体的位置。
三角定位法是利用目标物体与多个发射器/接收器之间的距离来计算目标物体在平面或空间中的位置的一种方法。
当目标物体与三个以上的发射器/接收器配对时,可以通过计算交点来确定目标物体的位置。
交点是所有发射器/接收器之间连线的交点,它是目标物体在平面/空间中的位置。
四、应用领域基于超声波的跟踪定位系统具有广泛的应用场景,包括物流、工业生产、医疗、安全等领域。

常见的七种无线定位技术总结
常见的无线定位技术有以下七种:
红外线定位、超声波定位、蓝牙定位、射频识别定位、超宽带定位、无线高保真定位和Zigbee(传感器)定位。
红外线定位
基本原理:主要通过在已知节点处的红外线发射设备发射红外线,然后在待测节点布置好的光学传感器接收这些红外信号,经过对红外信号的处理,计算出距离,从而达到定位效果。
优缺点:一是红外线传播距离较短,二是红外线没有越过障碍物的能力,这就要求定位环境没有障碍物,或说定位只能在可视距条件下。
超声波定位。


超声波检测技术对电子元器件的快速定位方法详解超声波检测技术是一种非接触式的无损检测方法,广泛应用于电子元器件的快速定位。
本文将详细解析超声波检测技术在电子元器件中的应用和定位方法。
超声波检测技术通过将电子元器件暴露在超声波的传感器范围内,并接收返回的超声波信号来进行定位。
它能够快速检测出电子元器件内部的缺陷和故障,并定位到具体的位置。
这种技术具有高效、准确、非侵入性的特点,成为现代电子制造业中不可或缺的定位方法。
首先,超声波检测技术在电子元器件中的应用范围广泛。
它适用于各种材料,包括金属和非金属材料,如电路板、芯片、电容器、电阻器等。
这种技术能够快速探测元器件中的裂缝、松动、焊接问题等,并提供定量的缺陷评估。
其次,超声波检测技术具有高精度和准确性。
通过调整超声波探头的频率和角度,可以获取高分辨率的图像和信号。
利用超声波的传播特性,可以对电子元器件进行三维成像,准确地定位到故障点。
这种技术能够检测微小的缺陷,即使是隐蔽的故障也能够快速识别出来。
另外,超声波检测技术具有实时性和高效率。
它可以实时地监测电子元器件的工作状态,并能够快速定位到故障点。
相比其他非破坏性检测方法,超声波检测技术不需要对电子元器件进行拆卸或停机维修,极大地提高了工作效率和生产效益。
在电子元器件的快速定位过程中,超声波检测技术需要注意以下几个方面。
首先是探头的选择和角度的调整。
不同的电子元器件形状和结构,需要选择不同类型和频率的超声波探头,并调整合适的角度来获取最佳的图像和信号。
其次是信号处理和分析。
通过对接收到的超声波信号进行处理和分析,可以识别出故障类型和位置,从而进行准确的定位。
最后是对检测结果的解释和评估。
根据超声波检测技术提供的图像和信号,结合相关标准和经验,对故障进行解释和评估,确定应采取的修复措施。
总之,超声波检测技术在电子元器件的快速定位中发挥着重要的作用。
它具有广泛的应用范围、高精度和准确性、实时性和高效率等特点。
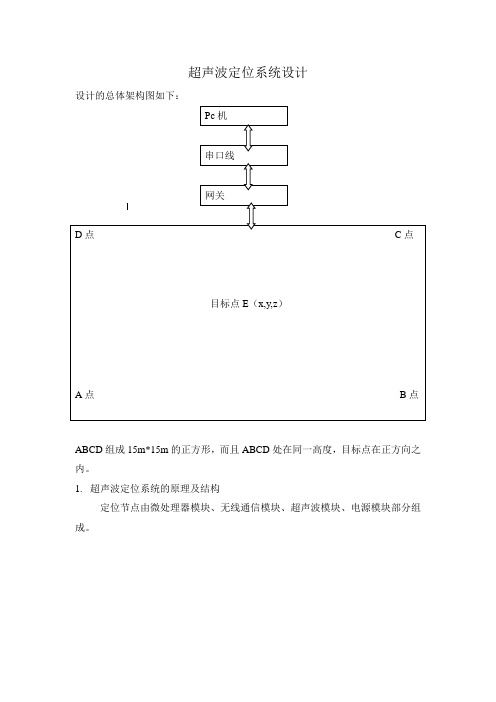
超声波定位系统设计设计的总体架构图如下:ABCD组成15m*15m的正方形,而且ABCD处在同一高度,目标点在正方向之内。
1.超声波定位系统的原理及结构定位节点由微处理器模块、无线通信模块、超声波模块、电源模块部分组成。
超声波发射机由单片机控制程序,CC2420向外广播搜寻待需要定位的节点。
射频信号的速率接近3×108m/s,远远高于超声波340m/s的速率,可以忽略射频信号的传输时间,同时发送射频信号和超声波信号。
需要定位的节点会先收到射频信号开启超声波接收模块并启动定时器,而后收到超声波停止定时器。
发射机通过测量超声波与射频信号的时间差,来计算发射点与需要定位节点的距离。
发射头选用TCT40-16T 接受头选用TCT40-16R 二者的频率都在40+1.0KHz,方向角为60度,温度在-20---70℃。
CC2420的选择性和敏感性指数超过了IEEE802.15.4标准的要求,可确保短距离通信的有效性和可靠性。
是适用于ZigBee产品的RF器件。
利用此芯片开发的无线通信设备支持数据传输率高达250kbps可以实现多点对多点的快速组网。
2 硬件设计1)Atmega128L的微处理控制器2)天线通信模块采用的是CC2420,CC2420集成ZigBee技术的有点。
3)超声波模块:发射模块分为三部分调制信号的产生,调制信号的放大,超声波信号的发送。
脉冲信号由Atmega128产生,脉宽为200us,即一个调制脉冲内包含8个40可KHz方波。
3 软件设计定位算法在传感器网络中,定位算法有好多种,在这里我用的是三维位置测量法。
具体是发射节点的坐标用三个值进行表示,假设为(x,y,z).A点的坐标为(0,0,h),b点的坐标为(0,m,h),c点坐标为(n,0,h),D点的坐标为(n,m,h).计算出(X,Y,Z)。
本设计是基于超声波测距技术的三维定位系统,精度可以达到厘米级。
CC2420和Atmega128都是功能强大且功耗很低的芯片,它们在待机和工作的不同模式提高了整个系统的工作效率,降低系统的功耗。
实验16 超声定位和形貌成像实验一、概述1、超声定位的基本原理超声定位的基本原理是由超声波发生器向目标物体发射脉冲波,然后接收回波信号;当超声波发生器正对着目标物体时,接收到的回波信号强度将最大,这时得到发射波与接收波之间的时间差Δt ,再根据脉冲波在介质中的传播速度v 而得到目标物体离脉冲波发射点的距离。
这样就可以得出目标物体离脉冲波发射点的方位和距离,即下图1中的θ和S ,S=v ×Δt 。
图1、超声定位的基本原理2、水中声速的测量用脉冲回波法测量水中声速的原理:改变目标物体离脉冲声源的距离得到不同的接收回波时间差,用时差法来测量水中声速。
假设目标物体到声源的垂直距离为S1时,脉冲发射波到接收波的时间为t1;改变目标物体到声源的垂直距离为S2,此时脉冲发射波到接收波的时间为t2;这样,水中的声源传播速度为:tS t t S S v ∆∆=--=2|12||12|2m/s ,具体见图2(说明:S 为声源离目标物体的垂直距离,t 为声源发射到接收到回波信号之间的时间)图2、时差法测量水中声速3、超声成像的基本原理超声成像(ultrasonic imaging)是使用超声波的声成像。
它包括脉冲回波型声成像(pulse echo acoustical imaging)和透射型声成像(transmission acoustical imaging)。
前者是发射脉冲声波,接收其回波而获得物体图像的一种声成像方法;后者是利用透射声波获得物体图像的声成像方法。
目前,在临床应用的超声诊断仪都是采用脉冲回波型声成像。
而透射型声成像的一些成像方法仍处于研究之中,如某些类型的超声CT成像(computed tomography by ultrasound)。
目前研究较多的有声速CT成像(computed tomography of acoustic Velocity)和声衰减CI成像(computed tomography of acoustic attenuation)。
第四章 焊缝超声波探伤第三节 焊缝超声波探伤定位超声波探伤定位的方法是利用已知尺寸的试块(或工件)作为反射体来调节探伤仪的时间轴,然后根据反射波出现在时间轴上的位置,确定缺陷的位置。
一、斜探头定位与直探头定位的区别纵波探伤时定位比较简单,如探测100mm 厚的工件,可把底面回波调在10格,则每格代表工件中的声程(或垂直距离)为100/10=10(mm)。
(因耦合层极薄,可忽略不计)。
探伤时,若在6格出现缺陷波,则缺陷离工件表面的距离为6×10=60mm 。
横波探伤时的定位比较复杂(见图5–7所示),与纵波探伤相比有三点区别:① 超声波射到底面时无底面回波(故时间轴需在试块上预先调节);② 有机玻璃斜楔内一段声程OO '(称斜探头本体声程)在中薄板焊缝探伤定位时不能忽略,必须加以考虑。
③ 超声波的传播路线为O 'OAB(或O 'OB)折线,定位时,必须得用三角公式进行计算。
二、斜探头探伤定位基本原理焊缝探伤前,一般先进行斜探头入射点和折射角的测定,以及时间轴的调节。
故入射点O 和折射角β是已知的,示波屏上扫描线每格所代表的距离(可以是水平距离、垂直距离或声程)也是可知的。
这样,在直角三角形中,知道一只角、一条边、则其他两条边也可求出,故缺陷位置(缺陷离探头入射点的水平距离和深度)便可确定。
根据时间扫描线调节方法的不同,可分三种定位法: 1. 水平定位法即时间扫描线与水平距离成相应的比例关系。
2. 垂直定位法即时间扫描线与深度距离成相应的比例关系。
3. 声程定位法即时间扫描线与声程距离成相应的比例关系。
一般板厚≤24mm 时,用水平定位法、板厚≥32mm 时用垂直定位法。
时间轴的调节,其最大测定范围应在1S ~1.5S 之间(1S 为一个跨距的声程距离)。
三、焊缝超声波探伤定位的常用方法多年来,不少厂矿企业中的检测人员根据自己产品的特点,经过不断摸索、反复实践,已总结出了好多简便、有效的定位方法,下面仅介绍几种常用的定位方法。
超声波定位原理
超声波定位是一种利用超声波来确定物体位置的技术。
它基于声波在空气或其他介质中传播的速度固定的原理。
超声波定位系统通常由发射器和接收器组成。
发射器发射超声波脉冲,脉冲辐射到周围的环境中并与障碍物相互作用。
随后,接收器接收到反射回来的超声波信号。
接收器接收到信号后,可以根据超声波的传播时间来计算物体与定位系统之间的距离。
根据超声波在空气中传播的速度和来回时间,可以简单地使用速度乘以时间的一半来计算距离。
另外,在多个接收器同时接收到反射回来的信号后,可以通过测量信号的到达时间差来确定物体的方向。
这是利用超声波在传播过程中的速度不变性来实现的。
超声波定位系统在许多领域都有广泛应用。
例如,在无人驾驶汽车中,超声波定位可用于检测周围的障碍物。
在医学成像中,超声波定位可用于确定人体内部器官的位置。
此外,还可以应用于测距仪、声纳系统等各种应用中。
总的来说,超声波定位利用超声波的传播时间和速度来确定物体的位置。
它具有精度高、反应时间快等优点,因此在许多领域得到了广泛应用。