超声波定位系统
- 格式:pdf
- 大小:1.68 MB
- 文档页数:24

基于超声波技术的室内定位系统研究随着智能家居、智能工厂等技术的发展,室内定位技术也成为了一个基础性技术。
以前在室内定位技术方面,常用的是基于Wi-Fi、蓝牙、红外等技术,但是由于其存在精度、覆盖范围、干扰等方面的局限性,而现在更多的是基于超声波技术的室内定位系统。
超声波室内定位系统的原理是,利用超声波模块向四周发出超声波信号,接收模块接收信号后带有时序信息,通过算法计算可以确定接收模块在空间中的位置,进而确定被定位目标。
相较于其他常用的技术,超声波室内定位系统具有精度高、覆盖范围广、干扰小等优点。
实现超声波室内定位系统主要依靠硬件和算法两方面。
硬件方面,主要涉及超声波传感模块、控制器、定位标签等部分,其中传感模块是核心部件。
在高精度定位要求的应用场景下,需要在定位区域安装足够数量的超声波模块保证定位标签与多个收发模块之间发生超声波交互。
算法方面,超声波室内定位系统需要用到距离测量算法、三角定位算法、蒙特卡洛算法等。
这些算法的目的是通过处理传感器获取的数据,最终确定被定位物体的位置。
其中实现精度较高的超声波室内定位系统,需要通过深度学习等技术优化算法。
超声波室内定位系统应用于通行管理、物资调配、室内导航等领域,它可以精确地为物品或个体标签建立位置信息,实现快速智能化管理和监控。
例如,在仓储场所中,超声波室内定位系统可以提高物品及库存的精准度,节省按人工统计库存所需的时间和精力。
此外,超声波室内定位系统还可以为用户提供室内导航,实现了人机交互的全新体验感。
当然,超声波室内定位系统在应用过程中也存在着不少问题需要解决。
例如,超声波模块工作过程中易受设备、人员、环境等外部干扰,进而造成误差。
还有定位标签电量耗费、外观设计等问题都需要针对性地解决。
随着技术发展,这些问题的解决方案也会逐步出现。
总的来说,基于超声波技术的室内定位系统,是一个依赖硬件设备和算法的全新技术应用。
其优点在于精度高、覆盖范围广,可以为用户提供更全面、智能化的定位服务。

基于超声波的跟踪定位系统研究在现代社会中,人们需要对移动物体进行实时追踪和定位,以便于进行相关监测和控制操作。
为了实现这个目标,基于超声波的跟踪定位系统成为了一个被广泛研究的领域。
这篇文章主要探讨了基于超声波的跟踪定位系统的研究,包括定位原理、系统设计、算法实现和应用领域等方面。
一、定位原理基于超声波的跟踪定位系统是一种利用声波在空气中的变化进行测距、定位和追踪的技术。
声波是一种机械波,它能够在空气中传播,并在遇到不同密度的物体时发生反射、折射和散射等现象。
这为声波跟踪定位提供了基础条件。
在这种系统中,如何采集声波信号并从中获取有用的信息是至关重要的。
定位原理的核心是测量声波传播的时间差。
在系统中,一组发射器和接收器被放置在目标区域内。
这些发射器将超声波信号发送到目标物体,接收器接收到物体反射回来的声波。
通过测量发射和接收的时间差,可以确定目标物体与接收器之间的距离。
当有多组发射器和接收器组成网络时,可以利用三角定位法计算目标物体的位置。
二、系统设计基于超声波的跟踪定位系统由以下几个部分组成:1. 发射器:负责发射超声波,通常使用压电材料来产生机械振动引起声波发射。
2. 接收器:负责接收目标物体反射回来的声波,并将其转化为电信号。
通常采用压电材料来产生电信号。
3. 时间测量器:负责测量发射器和接收器之间的时间差来确定目标物体与接收器之间的距离。
4. 数据处理器:负责实现测距数据的处理,包括三角定位法的计算。
5. 软件界面:提供用户接口和数据输出,通常使用图形化界面。
三、算法实现基于超声波的跟踪定位系统通常采用三角定位法来计算目标物体的位置。
三角定位法是利用目标物体与多个发射器/接收器之间的距离来计算目标物体在平面或空间中的位置的一种方法。
当目标物体与三个以上的发射器/接收器配对时,可以通过计算交点来确定目标物体的位置。
交点是所有发射器/接收器之间连线的交点,它是目标物体在平面/空间中的位置。
四、应用领域基于超声波的跟踪定位系统具有广泛的应用场景,包括物流、工业生产、医疗、安全等领域。
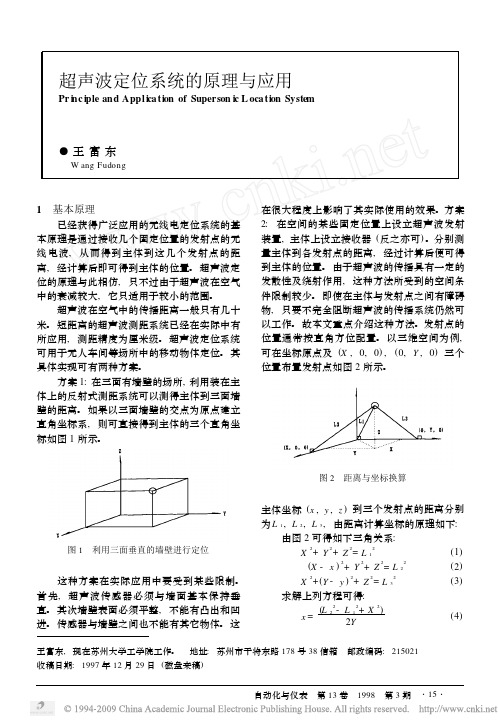
超声波定位系统的原理与应用Pr i nc iple and Appl ica tion of Superson ic L oca tion Syste m●王富东W ang Fudong1 基本原理已经获得广泛应用的无线电定位系统的基本原理是通过接收几个固定位置的发射点的无线电波,从而得到主体到这几个发射点的距离,经计算后即可得到主体的位置。
超声波定位的原理与此相仿,只不过由于超声波在空气中的衰减较大,它只适用于较小的范围。
超声波在空气中的传播距离一般只有几十米。
短距离的超声波测距系统已经在实际中有所应用,测距精度为厘米级。
超声波定位系统可用于无人车间等场所中的移动物体定位。
其具体实现可有两种方案。
方案1:在三面有墙壁的场所,利用装在主体上的反射式测距系统可以测得主体到三面墙壁的距离。
如果以三面墙壁的交点为原点建立直角坐标系,则可直接得到主体的三个直角坐标如图1所示。
图1 利用三面垂直的墙壁进行定位 这种方案在实际应用中要受到某些限制。
首先,超声波传感器必须与墙面基本保持垂直。
其次墙壁表面必须平整,不能有凸出和凹进。
传感器与墙壁之间也不能有其它物体。
这在很大程度上影响了其实际使用的效果。
方案2:在空间的某些固定位置上设立超声波发射装置,主体上设立接收器(反之亦可)。
分别测量主体到各发射点的距离,经过计算后便可得到主体的位置。
由于超声波的传播具有一定的发散性及绕射作用,这种方法所受到的空间条件限制较少。
即使在主体与发射点之间有障碍物,只要不完全阻断超声波的传播系统仍然可以工作。
故本文重点介绍这种方法。
发射点的位置通常按直角方位配置。
以三维空间为例,可在坐标原点及(X ,0,0),(0,Y ,0)三个位置布置发射点如图2所示。
图2 距离与坐标换算主体坐标(x ,y ,z )到三个发射点的距离分别为L 1,L 2,L 3,由距离计算坐标的原理如下: 由图2可得如下三角关系: X 2+Y 2+Z 2=L 12(1) (X -x )2+Y 2+Z 2=L 22(2) X 2+(Y -y )2+Z 2=L 32(3) 求解上列方程可得: x =(L 22-L 12+X 2)2Y(4)王富东,现在苏州大学工学院工作。
基于AT89C51的超声波定位系统设计作者:金鑫来源:《电子世界》2012年第19期【摘要】本系统是向测量目标发射超声波脉冲然后接收相应的反射波,由AT89C51集成的模拟比较器A检测到达系统的回声,计算时间以达到定位目的的精确测量系统。
【关键词】超声波;测距;定位1.前言本设计的主要应用是eBeam白板,该系统是通过吸附于普通白板左右上角的两个接受器接受并传送白板笔在书写时发出的超声波至本地计算机,从而将写于白板的任何笔迹及现场声音记录于本地计算机,并可通过internet及时传送给远端计算机。
2.总体方案设计本设计采用超声波发生与接收一体的装置,通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差,然后计算出相应的距离。
假设声波室温下在空气中的速度为340米/秒,AT89CC51计算系统与目标间的距离并采用LED将其显示在四位的LED显示器上。
距离以米为单位显示,精度为1cm。
本系统由超声波测距系统及定位系统两部分组成。
3.超声波测距系统的设计3.1 系统概述单片机发出超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波,从而测出发射和接收回波的时间差,然后计算出相应的距离。
3.2 系统硬件设计本系统主要电路又单片机主机系统电路、超声波发射、接收电路、LED显示电路。
3.2.1 单片机主机系统电路本电路由AT89C51主机、时钟、复位电路及报警电路组成。
3.2.2 超声波发射电路超声波发送器包括超声波产生电路和超声波发射控制电路两个部分,超声波探头选用CSB40T,可利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。
3.2.3 超声波接收电路超声波接收器包括超声波接收探头、信号放大电路及波形变换电路三部分。
超声波接收电路的作用是对接收的超声波信号进行放大,并将该信号处理成系统可以接收的电平信号。
3.2.4 LED显示电路常用的测量数据的显示器有发光二极管显示器(简称LED或数码管)和液晶显示器(简称LCD)。
蝙蝠和雷达仿生学例子蝙蝠和雷达是仿生学中经常被引用的例子,它们之间的关系非常密切。
蝙蝠是一种夜行性动物,由于在黑暗中无法依靠视觉来感知周围环境,蝙蝠进化出了一种独特的生物雷达系统,即超声波定位系统。
通过发出超声波信号并根据回波来判断周围环境的情况,蝙蝠能够精确地感知到障碍物的位置和形状,从而避免碰撞。
雷达技术正是受到了蝙蝠的超声定位系统的启发而发展起来的。
下面将详细介绍蝙蝠和雷达在仿生学中的应用。
1. 蝙蝠的超声波定位系统蝙蝠通过声波的反射来感知周围环境,它们发出一系列高频声波,然后根据声波的回声来确定物体的位置和形状。
蝙蝠的耳朵非常敏感,能够听到高于人类听力范围的声音。
这种超声波定位系统使蝙蝠能够在黑暗中捕捉到食物,避免障碍物,甚至能够在飞行中捕捉到昆虫。
2. 蝙蝠的声音发射器和接收器蝙蝠的声音发射器位于嘴巴附近,它们能够发出高频声波,然后通过耳朵接收回声。
蝙蝠的耳朵相距较远,这样可以更好地接收到回声,从而提高定位的精度。
蝙蝠通过调整声音的频率和幅度来适应不同的环境和任务。
3. 蝙蝠的大脑处理声音的能力蝙蝠的大脑具有很强的处理声音的能力,它们能够分辨不同频率和幅度的声波,并将其转化为对物体的位置和形状的认知。
蝙蝠的大脑还能够将声波的时间差转化为物体距离的信息,从而更加准确地定位物体。
4. 雷达技术的发展雷达技术是受到蝙蝠的超声波定位系统的启发而发展起来的。
雷达系统通过发射电磁波并接收回波来感知周围环境。
雷达系统可以用于军事、航空、气象等领域,能够探测飞机、船只和天气情况等。
雷达技术的发展使得人类能够在远距离和恶劣环境下进行目标探测和跟踪。
5. 雷达系统的工作原理雷达系统通过发射电磁波并接收回波来感知周围环境。
当电磁波遇到物体时,会被反射或散射,然后被接收器接收到。
通过测量发送和接收之间的时间差,可以计算出物体的距离。
利用多普勒效应,还可以计算出物体的速度和方向。
6. 蝙蝠和雷达的相似之处蝙蝠和雷达都是通过发射信号并接收回波来感知周围环境。
目录摘要 (2)第一章系统总体设计方案 (4)1.1 超声波测距原理 (4)1.2 超声波测距系统 (4)第二章系统的硬件设计 (5)2.1 超声波发生电路 (5)2.2 超声波接收电路 (6)2.3 温度的补偿 (8)2.4 LED动态显示电路 (8)第三章系统软件设计 (9)3.1 主程序结构 (10)3.2 中断程序结构 (11)3.3回波接收程序 (11)第四章误差分析 (12)4.1.时间误差 (12)4.2.超声波传播速度误差 (12)第五章调试 (12)第六章整机原件清单 (13)第七章总结 (13)7.1设计任务完成情况 (13)7.2 心得体会 (14)参考文献 (15)附录一 (16)附录二 (17)附录三 (18)摘要高度定位控制和测量系统也就是我们常说的超声波测距。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
而电子技术及压电陶瓷材料的发展,使高度定位控制和测量系统得到了迅速的发展。
超声测距是一种非接触式的检测技术。
与其它方法相比,它不受光线、被测物处于黑暗、有灰尘、烟雾、电磁干扰、有毒等恶劣的环境下有一定的适应能力。
因此在液位测量、机械手控制、车辆自动导航、物体识别等有广泛应用。
特别是应用于空气测距,由于空气中波速较慢,其回波信号中包含的沿传播方向上的结构信息很容易检测出来,具有很高的分辨率,因而其准确度也较其它方法为高;而且超声波传感器具有结构简单、体积小、信号处理可靠等特点。
关键字:传感器、测距、测量系统、设计、高度定位PICKHighly positioning control and measurement system is also we often say the ultrasonic ranging. Due to the strong, the energy consumption of ultrasonic directivity slowly in the medium of communication, distance, and is often used to measure the distance of ultrasonic, such as rangefinder and material level measurement instrument etc can all through the ultrasonic. And electronic technology and the development of piezoelectric ceramic materials, high positioning control and measuring systems have been developed rapidly.Ultrasonic ranging is a non-contact detection technologies. Compared with other methods, it is light and darkness, the analyte in dust, smoke, electromagnetic interference, toxic etc harsh environments have certain ability to adapt. Therefore, in robot control level measurement, vehicle navigation, automatic object recognition is widely used. Especially the application in the air, the air velocity range due to low, the echo signal along the direction of propagation of contains information on the structure, very easily with high resolution, and its accuracy is higher than other methods for, And the ultrasonic sensor has simple structure, small volume, the characteristic such as being reliable signal processing.Key words: sensor, and measurement system, the design, the high position第一章系统总体设计方案1.1 超声波测距原理超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。