第三章 时域分析
- 格式:doc
- 大小:868.50 KB
- 文档页数:12
第3章时域分析法基本要求3-1 时域分析基础3-2 一、二阶系统分析与计算3-3 系统稳定性分析3-4 稳态误差分析计算返回主目录基本要求1熟练掌握一、二阶系统的数学模型和阶跃响应的特点。
熟练计算性能指标和结构参数,特别是一阶系统和典型欠阻尼二阶系统动态性能的计算方法。
2了解一阶系统的脉冲响应和斜坡响应的特点。
3正确理解系统稳定性的概念,能熟练运用稳定性判据判定系统的稳定性并进行有关的参数计算、分析。
4正确理解稳态误差的概念,明确终值定理的应用条件。
5熟练掌握计算稳态误差的方法。
6掌握系统的型次和静态误差系数的概念。
控制系统的数学模型是分析、研究和设计控制系统的基础,经典控制论中三种分析(时域,根轨迹,频域)、研究和设计控制系统的方法,都是建立在这个基础上的。
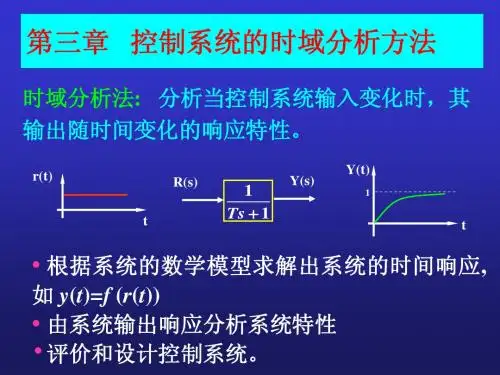
3-1 时域分析基础一、时域分析法的特点它根据系统微分方程,通过拉氏变换,直接求出系统的时间响应。
依据响应的表达式及时间响应曲线来分析系统控制性能,并找出系统结构、参数与这些性能之间的关系。
这是一种直接方法,而且比较准确,可以提供系统时间响应的全部信息。
二、典型初始状态,典型外作用1. 典型初始状态通常规定控制系统的初始状态为零状态。
即在外作用加于系统之前,被控量及其各阶导数相对于平衡工作点的增量为零,系统处于相对平衡状态。
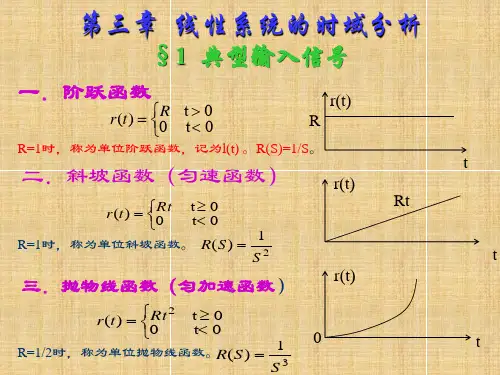
2. 典型外作用①单位阶跃函数1(t)tf(t)⎩⎨⎧<≥==0t 00t 1)t (1)t (f 其拉氏变换为:s 1dt e 1)s (F )]t (f [L 0st===⎰∞-其数学表达式为:t②单位斜坡函数0t 0t 0t)t (1t )t (f <≥⎩⎨⎧=.=其拉氏变换为:2sts 1dt e t )s (F )]t (f [L ===⎰∞-f(t)其数学表达式为:③单位脉冲函数000)()(=≠⎩⎨⎧∞==t t t t f d 其数学表达式为:其拉氏变换为:1)()]([==s F t f L ⎰+∞∞-=1)(dt t d 定义:图中1代表了脉冲强度。

第3章 控制系统时域分析电气信息学科世界著名学者诺伯特·维纳(Norbert Wiener,1894~1964)维纳是美国数学家,控制论的创始人.1948年维纳发表《控制论》,宣告了这门新兴学科的诞生. 这是他长期艰苦努力并与生理学家罗森勃吕特等人多方面合作的伟大科学成果. 维纳立即从声誉有限的数学家一跃成为一位国际知名人士.维纳是一个名符其实的神童.他三岁半开始读书,生物学和天文学的初级科学读物就成了他在科学方面的启蒙书籍,七岁时,开始深入物理学和生物学的领域,甚至超出了他父亲的知识范围.维纳于15岁时获得塔夫茨学院数学系学士学位,并于18岁获哈佛大学哲学博士学位.他先后留学于英国剑桥大学和德国哥丁根大学,在罗素、哈代、希尔伯特等著名数学家指导下研究逻辑和数学.1924年维纳升任助理教授,1929年升为副教授,由于在广义调和分析和关于陶伯定理方面的杰出成就,1932年晋升为正教授.维纳在其50年的科学生涯中,先后涉足哲学、数学、物理学和工程学,最后转向生物学,在各个领域中都取得了丰硕成果,称得上是恩格斯颂扬过的、本世纪多才多艺和学识渊博的科学巨人.他一生发表论文240多篇,著作14本.主要著作有《控制论》(1948)、《维纳选集》(1964).维纳还有两本自传《昔日神童》和《我是一个数学家》.他的主要成果有如下八个方面:建立维纳测度;引进巴拿赫—维纳空间;阐述位势理论;发展调和分析;发现维纳—霍普夫方法;提出维纳滤波理论;开创维纳信息论;创立控制论. 1933年,维纳由于有关陶伯定理的工作与莫尔斯分享了美国数学会五年一次的博赫尔奖.同时,他当选为美国科学院院士.1934年,维纳应邀撰写了《复域上的傅立叶变换》.不久,他当选为美国数学会副会长.1959年,维纳从麻省理工学院退休。
1964年1月,他由于“在纯粹数学和应用数学方面并且勇于深入到工程和生物科学中去的多种令人惊异的贡献及在这些领域中具有深远意义的开创性工作”荣获美国总统授予的国家科学勋章.维纳是伽金汉基金会旅欧研究员,富布赖特研究员,英、德、法等国的数学会会员,但任过中国、印度、荷兰等国的访问教授.3.1 引言系统的时域分析指对控制系统的稳定性、暂态性以及稳态性能分析.稳定性是控制系统工作的前提,不稳定的系统没有任何工程价值.对于不同的系统,例如线性的、非线性的、定常的、时变的系统,稳定性的定义也不同,本章仅讨论线性定常单输入单输出系统的稳定性.从控制系统分析和设计的角度来说有绝对稳定性和相对稳定性,绝对稳定指系统是否稳定,一旦系统是稳定的,则人们更关心其稳定的程度,这就是相对稳定性,相对稳定性一般用稳定裕度衡量. 当系统受外加作用时引起的输出随时间的变化规律,称其为系统的时域响应,分为暂态响应和稳态响应.暂态响应是指系统输出量当时间趋于无穷时趋于零的那部分时间响应,工程上一般定义暂态响应为从初始状态到达某一规定值(例如偏离终值的误差值在终值的5%或2%以内)并且以后不再超过此值的这一部分时间响应过程,它反映控制系统的快速性和阻尼程度,由于系统物体的惯性都是无法避免的,因此人们常常可以观察到暂态现象.而稳态响应则是整个响应在暂态响应消失后余下的那部分响应,主要指系统输出量的最终位置,它反映控制系统的准确性或控制精度,控制系统是按照稳态误差和误差系数的计算来表示控制精度的.本章主要分析了一阶和二阶线性定常系统的典型输入信号激励下的时域响应以及对应的时域性能指标,详细介绍了单输入单输出线性定常系统的稳定性判断的劳斯-赫尔维茨判据,也对稳定的控制系统的稳态误差以及误差系数的分析计算做了详细的叙述,介绍了提高控制系统精度的一般工程方法.对高阶线性系统的分析在一定条件下可以用主导极点的模型降阶方法来近似.本章还介绍了如何利用MATLAB工具分析线性系统的性能.3.1.1 典型输入信号控制系统性能评价分为暂态性能指标和稳态性能指标两大类.对于同一系统,在不同的输入信号作用下会产生不同的输出响应, 因此为了求解系统的时间响应,必须了解输入信号的解析表达式. 然而,在一般情况下,控制系统的外加输入信号具有随机性而无法预先确定.因此,在分析和设计控制系统时,需要有一个对控制系统的性能进行比较的基准,这个基准就是系统对预先规定的具有典型意义的实验信号激励下的响应.为了评价控制系统的性能,需要选择若干个典型输入信号.另外,一个复杂的信号通常可看作是几个简单典型信号的合成.所谓典型输入信号,是指控制系统分析与设计中常常遇到的一些输入信号,也是在数学描述上加以理想化的一些基本输入函数.选取典型信号应满足如下条件,首先,输入信号的形式应反映系统响应的实际输入;其次,输入信号在形式上应尽可能的简单,应当是实验室或仿真可以获得以便于对系统响应进行分析的信号;另外,应选取能使系统工作在最不利情况下的激励信号作为输入信号.控制系统中常用的典型输入信号有:单位阶跃函数、单位斜坡(速度)函数、单位抛物线(加速度)函数、单位脉冲(冲激)函数和正弦函数等,如表3.1所示.表3.1 常用典型输入函数3.1.2 时域性能指标稳定是系统工作的前提,只有系统是稳定的,分析系统的暂态和稳态性能以及性能指标才有意义.控制系统时域性能指标(Time Response Specifications)分为暂态与稳态性能指标.1. 暂态性能指标一般认为阶跃输入对系统来说是最严峻的工作状态,如果系统在阶跃函数作用下的暂态 性能满足要求,那么系统在其它形式函数作用下其暂态性能也是令人满意的.为此,通常在阶跃函数作用下,测定或计算系统的暂态性能.描述稳定的系统在阶跃函数作用下暂态过程随时间t 的变化状况的指标,称为暂态性能指标.如图3.1所示为某一控制系统的阶跃响应,其暂态性能指标定义如下:1)调节时间 (settling time ) s t :指阶跃响应到达并保持在终值的±5%(或±2%)的 误差带内所需时间.2)峰值时间 (peak time) p t :响应超过其终值到达第一个峰值所需时间.3) 上升时间 (rise time) r t :响应从终值的10%上升到终值的90%所需时间. 对振荡系 统, 工程上上升时间r t 定义为输出从零到第一次上升至终值所需时间.4)超调量 (peak overshoot) %σ:响应的最大峰值与终值的差与终值比的百分数,即: ()()%100%()p c t c c σ-∞=⨯∞ (3.1) 超调量常常用来衡量控制系统的相对稳定性或阻尼程度,一般不希望控制系统有很大的超调.在实际应用中,以上四个指标可以用来衡量控制系统的暂态特征,一般通过测量系统的阶跃响应,很容易得到这些指标.通常,用p t 或r t 评价响应速度;用%σ评价系统的相对稳定程度或阻尼程度;用s t 同时反映响应速度和阻尼程度的综合性指标.除简单的一、二阶(0.9(c c ∞∞0.1(c ∞图 3.1 时域性能指标系统外,要精确确定这些暂态性能指标的解析表达式是很困难的.2. 稳态性能指标稳态误差ss e 是衡量系统控制精度或抗扰动能力的一种度量.工程上指控制系统进入稳态后(t →∞)期望的输出与实际输出的差值,ss e 越小,控制精度越高.3.2 控制系统时域分析3.2.1 一阶系统的时域分析可以用一阶微分方程描述的系统,称为一阶系统.一阶系统在控制工程实践中十分常见,有些高阶系统的特性,常可用一阶系统的特性近似表征.考察如图3.2所示的RC 电路,()c t 是电容器C 的输出电压.该电路系统的数学模型为一阶常微分方程:()()()dc t T c t r t dt+= 其中,T RC =为时间常数,控制系统方框图如图3.3所示 .其传递函数为: ()1()()1C s s R s TsΦ==+ (3.2) 1. 一阶系统的单位阶跃响应当输入信号为单位阶跃信号()1r t =()t , t ≥0时,系统的响应()c t 称为单位阶跃响应.将单位阶跃输入的像函数()1/R s s =代入式(3.2),并对输出取拉普拉斯反变换得到该一阶系统的单位阶跃响应:()1t T c t e -=-, t ≥0 (3.3)图 3.3 RC 电路方框图))t r 图 3.2 RC 电路由式(3.3)绘出的系统单位阶跃响应为以指数规律上升到终值1的曲线,如图 3.4 所示.其中,()0.632c T =;(2)0.865c T =;(3)0.950c T =;(4)0.982c T =.显然按照5%或2%的误差带准则有调节时间(3s t =~4)T (5% ~2%误差带),而p t ,%σ不存在. 综上所述,时间常数T 反映系统响应过程的快慢,T 越小,系统响应越快;反之,系统响应越慢.2. 一阶系统的单位脉冲响应当输入信号为单位脉冲或单位冲激信号()()r t t δ=时,系统的响应称为单位脉冲或单位冲激响应.因为理想单位脉冲函数的拉普拉斯变换为1,所以单位脉冲响应的拉普拉斯变换与系统的闭环传递函数相同,即:()()1()()()1r t t C s s R s Tsδ==Φ=+ 两边进行拉普拉斯反变换,得: 1()t T c t e T-= (3.4) 由式(3.4)可知,一阶系统的单位脉冲响应是非周期的单调递减函数,当0t =时,响应取最大值1/T ;当t →∞时,响应的幅值衰减为零.根据给出的误差带宽度可以求出调节时间s t ,通常取 (3s t =~4)T .一阶系统的单位脉冲响应如图 3.5 所示.图 3.4 一阶系统单位阶跃响应 t3. 一阶系统的单位斜坡响应当输入信号为单位斜坡或速度信号()r t t =,t ≥0时,系统的响应称作单位斜坡响应.因为单位斜坡输入的拉普拉斯变换像函数为2()1/R s s =,所以由拉普拉斯反变换得到该一阶系统的单位斜坡时域响应表达式为: ()()t T c t t T Te -=-+ (3.5)式(3.5)表明,一阶系统的单位斜坡响应可分为暂态分量和稳态分量两个部分,其中t T Te -为暂态分量,随时间的增加而逐渐衰减为零;t T -为稳态分量.一阶系统的单位斜坡响应如图 3.6所示.一阶系统单位斜坡响应的稳态误差lim(()())ss t e r t c t T →∞=-=,T 越小跟踪准确度越高.4. 一阶系统的单位抛物线响应当输入信号为单位抛物线或单位加速度信号2()/2r t t =,t ≥0时,因为单位抛物线输入信号拉普拉斯变换像函数为3()1/R s s =,所以由拉普拉斯反变换求得一阶系统的单位抛图 3.5 一阶系统单位脉冲响应t32 T 图 3.6 一阶系统单位斜坡响应物线的时域响应表达式为:221()(1)2t T c t t Tt T e -=-+- (3.6) 系统跟踪误差为:2()()()(1)t T e t r t c t Tt T e-=-=-- 因此lim ()t e t →∞=∞,即跟踪误差随时间增大而增大直至无穷大,故一阶系统不能实现对加速度输入函数的跟踪.3.2.2 典型二阶系统的时域分析如果动态系统的数学模型为二阶微分方程的系统,统称为二阶系统.在控制工程中,二阶系统应用广泛,而且许多高阶系统在一定条件下,可以近似用二阶系统的特性来表征.因此,二阶系统的性能分析,在自动控制理论中有着重要的地位.第2章分析的位置随动系统,其简化的数学模型为22c c m c r d d T K K dt dtθθθθ++= 闭环传递函数为2()()()c r m s K s s T s s KθθΦ==++ 将上式化为标准的典型二阶系统形式:222()()()2n n nC s s R s s s ωξωωΦ==++ (3.7) 其相应的方框图如图 3.7所示,其中,无阻尼振荡频率 (Undamping natural frequency)n ω= ,阻尼比(Damping factor)ξ=.典型二阶系统特征方程为:)s (R s 图 3.7 典型二阶系统2220n n s s ξωω++= (3.8)于是有特征根为:1,2n n d d s j j ξωωξωωσω=-±=-±=-± (3.9) 其中,特征根的实部为n σξω=,阻尼振荡频率(Damped natural frequency)d ωω=(1)ξ<.1. 典型二阶系统的单位阶跃响应典型二阶系统特征根的性质主要取决于ξ值的大小,ξ值的大小决定了系统阻尼程度.ξ在不同范围取值时,二阶系统的特征根在s 平面上的位置不同,典型二阶系统的时间响应对应着不同的运动规律.1)欠阻尼(01ξ<<)此时典型二阶系统在左半s 平面有一对共轭复根, 如图3.8 (a)所示.当输入为单位阶跃信号()1/R s s =时,由式(3.7)得到:222222211()2()()n n n n n n dn d s C s s s s s s s ωξωξωξωωξωωξωω+=⋅=--++++++两边分别取拉普拉斯反变换得:()1[cos ]n t d d c t e t t ξωωω-=-+1sin()n t d t ξωωβ-=+,0t > (3.10)其中, arctan β= 或 cos arc βξ=.式(3.10)表明,欠阻尼典型二阶系统的单位阶跃响应由两部分组成:稳态响应分量为1,表明典型二阶系统在单位阶跃函数作用下不存在稳态误差;暂态分量为阻尼正弦振荡项,其振荡频率为d ω.暂态分量衰减的快慢程度取决于包络线1n tξω-±对应的典型二阶系统欠阻尼情况下的单位阶跃响应如图3.8 (b)所示。
第三章时域分析刘健副教授liujian@课件下载地址:课件下载地址voicesp2013@/voicesp123456北京科技大学3.1 语音分析方法概述语音分析是语音合成及语音识别的基础。
短时分析技术——贯穿语音分析全过程语音分析的三种方法:(1)时域分析法——时域波形图。
(2)频域分析法——频谱图。
(2)频域分析法频谱图(3)语谱分析法——语谱图。
(1)时域分析法语音的时域分析采用时域波形图。
坐是,纵坐是。
横坐标是时间,纵坐标是幅值。
(2)频域分析法频域分析包含:语音信号的频谱、功率包含信的率谱、倒频谱、频谱包络、短时间谱等。
常用的频域分析方法有:a带通滤波器组法a.带通滤波器组法。
b.傅里叶变换法。
c.线性预测法等。
(3)语谱分析法语谱分析法是另种用于语音分析的有效方语谱分析法是另一种用于语音分析的有效方法。
语谱分析法始于20世纪40年代,当时研制成功语谱仪,能生成语谱图。
语谱图可以在二维(时间及频率)图上表示音强的关系,提供了有关不同时间不同频率的相对音强的有价值的信息。
对音强的有价值的信息3.2 语音的时域分析三种常用的时域分析方法:三种常用的时域分析方法(1)过零分析(2)幅度分析/能量分析(3)相关分析3.2 语音信号数字化-采样量化语音信号数字化采样量化采样:一个数字信号取样之后,变成离散时间信号,接下来就是要用数字方式来表示这个离散时间信号上的每个取样值的每个取样值。
量化:一个电位波形会有固定的电压范围,一个取样值可以是在此电压范围内的任何电位。
如果只能用固值可以是在此电压范围内的任何电位如果只能用固定数目的位来表示这些取样值,那么这些二进数字就只能代表固定的几个电位值,这个转换就是量化只能代表固定的几个电位值这个转换就是量化(quantization),而转换之后只允许存在的几个电位值(quantization level)就是量化阶数(quantization level)。
第3章 时域分析法1.选择题(1)一阶系统传递函数为4242++s s ,则其ξ,ωn 依次为( B )A .2,1/2B .1/2,2C .2,2D .1/2,1(2)两个二阶系统的最大超调量δ相等,则此二系统具有相同的( B ) A .ωn B .ξ C .k D .ωd(3)一个单位反馈系统为I 型系统,开环增益为k ,则在r(t)=t 输入下系统的稳态误差为( A ) A .k 1 B .0 C .k+11 D .∞ (4)某系统的传递函数为)16)(13(18)(++=s s s G ,其极点是 ( D )A .6,3-=-=s sB .6,3==s sC .61,31-=-=s s D .61,31==s s (5)二阶最佳系统的阻尼比ζ为( D )A. 1B. 2C. 0.1D. 0.707 (6)对于欠阻尼系统,为提高系统的相对稳定性,可以( C )A .增大系统的固有频率; B. 减小系统固有频率 C. 增加阻尼 D. 减小阻尼 (7)在ζ不变的情况下,增加二阶系统的无阻尼固有频率,系统的快速性将( A ) A. 提高 B. 降低 C. 基本不变 D. 无法得知 (8)一系统对斜坡输入的稳态误差为零,则该系统是( C )A.0型系统B. I 型系统C. II 型系统D. 无法确定(9)系统))((b s a s s cs +++的稳态误差为0,它的输入可能是( A )A.单位阶跃B.2tC.2t D. 正弦信号(10)系统开环传函为)1)(1(132+++s s s s ,则该系统为( B )系统 A.0型 B.I 型 C. II 型 D.III 型2.为什么自动控制系统会产生不稳定现象?开环系统是不是总是稳定的? 答:在自动控制系统中,造成系统不稳定的物理原因主要是:系统中存在惯性或延迟环节,它们使系统中的信号产生时间上的滞后,使输出信号在时间上较输入信号滞后了r时间。
当系统设有反馈环节时,又将这种在时间上滞后的信号反馈到输入端。
3.系统的稳定性与系统特征方程的根有怎样的关系?为什么?答:如果特征方程有一个实根s=a ,则齐次微分方程相应的解为c(t)=Ce at 。
它表示系统在扰动消失以后的运动过程中是指数曲线形式的非周期性变化过程。
若a 为负数,则当t →∞时,c(t)→0,则说明系统的运动是衰减的,并最终返回原平衡状态,即系统是稳定的。
则当t →∞时,c(t)→∞,则说明系统的运动是发散的,不能返回原平衡状态,即系统是不稳定的。
若a=0,c(t)→常数,说明系统处于稳定边界(并不返回原平衡状态,不属于稳定状态)4.什么是系统的稳定误差? 答:自动控制系统的输出量一般都包含着两个分量,一个是稳态分量,另一个是暂态分量。
暂态分量反映了控制系统的动态性能。
对于稳定的系统,暂态分量随着时间的推移。
将逐渐减小并最终趋向于零。
稳态分量反映系统的稳态性能,即反映控制系统跟随给定量和抑制扰动量的能力和准确度。
稳态性能的优劣,一般以稳态误差的大小来衡量。
5.已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间ts 减小为原来的0.1倍,并保证总放大系数不变。
试确定参数Kh 和K0的数值。
解:首先求出系统传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间ts 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+=)()11012.0(1010s s K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K6.设控制系统如图所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
7.设二阶控制系统的单位阶跃响应曲线如图所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,而是3。
系统模型为4 30 0.1 t二阶控制系统的单位阶跃响应h (t )222)(nn ns s s ωξωφ++=然后由响应的%p M 、p t 及相应公式,即可换算出ξ、n ω。
%33334)()()(%=-=∞∞-=c c t c M p p1.0=p t (s )由公式得%33%21/==--ξπξe M p1.012=-=ξωπn p t换算求解得: 33.0=ξ、 2.33=n ω8.设系统如图所示。
如果要求系统的超调量等于%15,峰值时间等于0.8s ,试确定增益K 1和速度反馈系数K t 。
同时,确定在此K 1和K t 数值下系统的延迟时间、上升时间和调节时间。
解 由图示得闭环特征方程为0)1(112=+++K s K K s t即21n K ω=,nnt t K ωωξ212+=由已知条件1+Ts Kbs R (s )C (s ))1(1+s s K1+K t s8.0115.0%21/2=-===--tn p p t e M t t ξωπξπξ解得1588.4,517.0-==s n t ωξ于是05.211=K 178.0211==-K K nt t ωξs t nt t d 297.02.06.012=++=ωξξs t tn t tn r 538.01arccos 122=--=--=ξωξπξωβπs t nt s 476.15.3==ωξ9.已知系统特征方程式为0516188234=++++s s s s试用劳斯判据判断系统的稳定情况。
解 劳斯表为4s 1 18 5 3s 8 16 0 2s168161188=⨯-⨯ 580158=⨯-⨯1s5.1316581616=⨯-⨯ 0 0s55.1301655.13=⨯-⨯ 由于特征方程式中所有系数均为正值,且劳斯行列表左端第一列的所有项均具有正号,满足系统稳定的充分和必要条件,所以系统是稳定的。
10.一种测定直流电机传递函数的方法是给电枢加一定的电压,保持励磁电流不变,测出电机的稳态转速;另外要记录电动机从静止到速度为稳态值的50%或63.2%所需的时间,利用转速时间曲线(如图3-47)和所测数据,并假设传递函数为)()()()(a s s Ks V s s G +=Θ=可求得K 和a 的值。
若实测结果是:加10V 电压可得1200min r 的稳态转 速,而达到该值50%的时间为1.2s ,试求电机传递函数。
提示:注意as Ks V s +=Ω)()(,其中dt d t θω=)(,单位是s rad解 依题意有: 10)(=t v (伏) ππω406021200)(=⨯=∞ (弧度/秒) (1)πωω20)(5.0)2.1(=∞= (弧度/秒) (2)设系统传递函数 as Ks V s s G +=Ω=)()()(0 πω401010lim )()(lim )(000==+⋅⋅=⋅=∞→→aK a s K s s s V s G s s s (3) [][]ate a K a s s L a K a s s K L s V s G L t -----=⎥⎦⎤⎢⎣⎡+-=⎥⎦⎤⎢⎣⎡+=⋅=1101110)(10)()()(1101ω 由式(2),(3) [][]ππω20140110)2.1(2.12.1=-=-=--a a e e aK得 5.012.1=--ae解出 5776.02.15.0ln =-=a (4) 将式(4)代入式(3)得 2586.74==a K π11.单位反馈系统的开环传递函数)5(4)(+=s s s G ,求单位阶跃响应)(t h 和调节时间t s 。
解:依题,系统闭环传递函数)1)(1(4)4)(1(4454)(212T s T s s s s s s ++=++=++=Φ ⎩⎨⎧==25.0121T T41)4)(1(4)()()(210++++=++=Φ=s C s C s C s s s s R s s C1)4)(1(4lim)()(lim 000=++=Φ=→→s s s R s s C s s34)4(4l i m)()()1(l i m 011-=+=Φ+=→-→s s s R s s C s s31)1(4l i m)()()4(l i m 042=+=Φ+=→-→s s s R s s C s st t e e t h 431341)(--+-=421=T T , ∴3.33.3111==⎪⎪⎭⎫ ⎝⎛=T T T t t s s 。
12.设角速度指示随动系统结构图如图3-48所示。
若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K 应取何值,调节时间s t 是多少?解 依题意应取 1=ξ,这时可设闭环极点为02,11T -=λ。
写出系统闭环传递函数 Ks s Ks 101010)(2++=Φ 闭环特征多项式20022021211010)(⎪⎪⎭⎫ ⎝⎛++=⎪⎪⎭⎫ ⎝⎛+=++=T s T s T s K s s s D 比较系数有 ⎪⎪⎩⎪⎪⎨⎧=⎪⎪⎭⎫ ⎝⎛=K T T 101102200 联立求解得 ⎩⎨⎧==5.22.00K T 因此有 159.075.40''<''==T t s13.给定典型二阶系统的设计指标:超调量%5%≤σ,调节时间 s t s 3<,峰值时间s t p 1<,试确定系统极点配置的区域,以获得预期的响应特性。
解 依题%5%≤σ, )45(707.0︒≤≥⇒βξ;35.3<=ns t ωξ, 17.1>⇒n ωξ;np t ωξπ21-=1<, 14.312>-⇒n ωξ综合以上条件可画出满足要求的特征根区域如图解所示。
14.电子心脏起博器心律控制系统结构图如题图所示,其中模仿心脏的传递函数相当于一纯积分环节。
(1) 若5.0=ξ对应最佳响应,问起博器增益K 应取多大?(2) 若期望心速为60次/min ,并突然接通起博器,问1s 钟后实际心速为多少?瞬时最大心速多大?解 依题,系统传递函数为2222205.005.0105.0)(nn n s s K s s Ks ωξωω++=++=Φ ⎪⎪⎩⎪⎪⎨⎧⨯==n n Kωξω205.0105.0 令 5.0=ξ可解 ⎩⎨⎧==2020nK ω将 s t 1=代入二阶系统阶跃响应公式()βωξξξω+---=-t e t h n t n 221sin 11)(可得 min 00145.60000024.1)1(次次==s h5.0=ξ时,系统超调量 %3.16%=σ,最大心速为min 78.69163.1163.01(次次)==+=s t h p15. 机器人控制系统结构图如图3-50所示。