科氏加速度.ppt
- 格式:ppt
- 大小:785.51 KB
- 文档页数:21
向心加速度与科氏加速度小认识向心加速度及与速度方向垂直的速度不改变速度大小只改变方向。
在时间很短的情况下。
向心方向产生一个速度与切向速度合成。
那么久而久之速度就会越来越大啊?答:与速度垂直的加速度,必然是由一个与速度垂直的力产生的,而瞬时位移始终是瞬时速度方向相同的,所以产生垂直加速度(向心加速度)的力始终和瞬时位移垂直。
因此这个力对物体不做功,物体的动能不增加,所以物体的速度不增加。
我觉得只有这样算是比较好理解的,如果一定要用加速度的效果来计算,我猜想可能需要用到求极限或者是求导数的方法,还是向量求极限或求导数,计算会更麻烦的。
科氏加速度认识历史旋转体系中质点的直线运动科里奥利力是以牛顿力学为基础的。
1835年,和提出,为了描述旋转体系的运动,需要在中引入一个假想的,这就是科里奥利力。
引入科里奥利力之后,人们可以像处理中的运动方程一样简单地处理旋转体系中的运动方程,大大简化了旋转体系的处理方式。
由于人类生活的本身就是一个巨大的旋转体系,因而科里奥利力很快在流体运动领域取得了成功的应用。
物理学中的科里奥利力科里奥利力来自于物体运动所具有的,在旋转体系中进行直线运动的,由于惯性的作用,有沿着原有运动方向继续运动的趋势,但是由于体系本身是旋转的,在经历了一段时间的运动之后,体系中质点的位置会有所变化,而它原有的运动趋势的方向,如果以旋转体系的视角去观察,就会发生一定程度的偏离。
如右图所示,当一个质点相对于惯性系做直线运动时,相对于旋转体系,其轨迹是一条曲线。
立足于旋转体系,我们认为有一个力驱使质点运动轨迹形成曲线,这个力就是科里奥利力。
根据的理论,以旋转体系为,这种质点的直线运动偏离原有方向的倾向被归结为一个外加力的作用,这就是科里奥利力。
从的角度考虑,科里奥利力与一样,都不是真实存在的力,而是惯性作用在内的体现。
科里奥利力的计算公式如下:式中为科里奥利力;m为质点的质量;为质点的运动速度;为旋转体系的角速度;表示两个的符号。
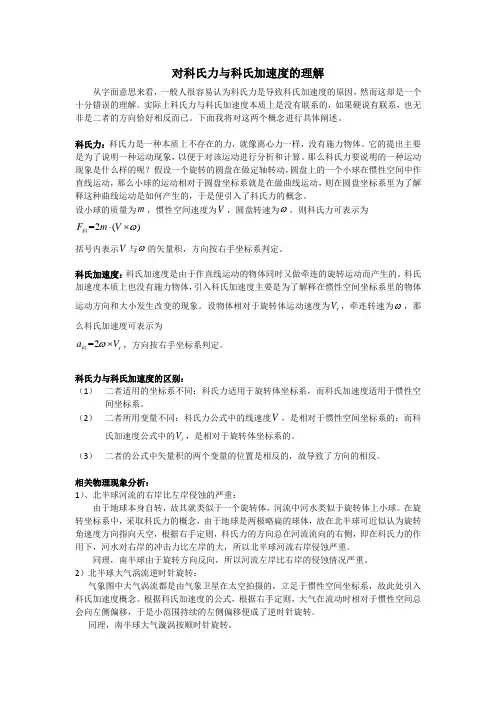
对科氏力与科氏加速度的理解从字面意思来看,一般人很容易认为科氏力是导致科氏加速度的原因,然而这却是一个十分错误的理解。
实际上科氏力与科氏加速度本质上是没有联系的,如果硬说有联系,也无非是二者的方向恰好相反而已。
下面我将对这两个概念进行具体阐述。
科氏力:科氏力是一种本质上不存在的力,就像离心力一样,没有施力物体。
它的提出主要是为了说明一种运动现象,以便于对该运动进行分析和计算。
那么科氏力要说明的一种运动现象是什么样的呢?假设一个旋转的圆盘在做定轴转动,圆盘上的一个小球在惯性空间中作直线运动,那么小球的运动相对于圆盘坐标系就是在做曲线运动,则在圆盘坐标系里为了解释这种曲线运动是如何产生的,于是便引入了科氏力的概念。
设小球的质量为m ,惯性空间速度为V ,圆盘转速为ω,则科氏力可表示为 =2()F m V ω⋅⨯科括号内表示V 与ω的矢量积,方向按右手坐标系判定。
科氏加速度:科氏加速度是由于作直线运动的物体同时又做牵连的旋转运动而产生的。
科氏加速度本质上也没有施力物体,引入科氏加速度主要是为了解释在惯性空间坐标系里的物体运动方向和大小发生改变的现象。
设物体相对于旋转体运动速度为r V ,牵连转速为ω,那么科氏加速度可表示为=2r a V ω⨯科,方向按右手坐标系判定。
科氏力与科氏加速度的区别:(1) 二者适用的坐标系不同:科氏力适用于旋转体坐标系,而科氏加速度适用于惯性空间坐标系。
(2) 二者所用变量不同:科氏力公式中的线速度V ,是相对于惯性空间坐标系的;而科氏加速度公式中的r V ,是相对于旋转体坐标系的。
(3) 二者的公式中矢量积的两个变量的位置是相反的,故导致了方向的相反。
相关物理现象分析:1)、北半球河流的右岸比左岸侵蚀的严重:由于地球本身自转,故其就类似于一个旋转体,河流中河水类似于旋转体上小球。
在旋转坐标系中,采取科氏力的概念,由于地球是两极略扁的球体,故在北半球可近似认为旋转角速度方向指向天空,根据右手定则,科氏力的方向总在河流流向的右侧,即在科氏力的作用下,河水对右岸的冲击力比左岸的大,所以北半球河流右岸侵蚀严重。
科氏加速度与科氏惯性力实验在一般情况下,牛顿定律只能应用于惯性坐标系,因此,在工程实际中都假定地球是静止不动的。
而实际上,即使不考虑地球每年绕太阳一周的公转运动,地球也还有每昼夜自转一周的自转运动,这就使得当考虑地球自转的影响时,运动的物体除受到重力的作用外,还将受到另一种力的作用,即科氏惯性力的作用。
本实验就是为了验证科氏惯性力的存在而设计的。
一、实验目的观察科氏惯性力的存在现象,了解产生科氏加速度的原因。
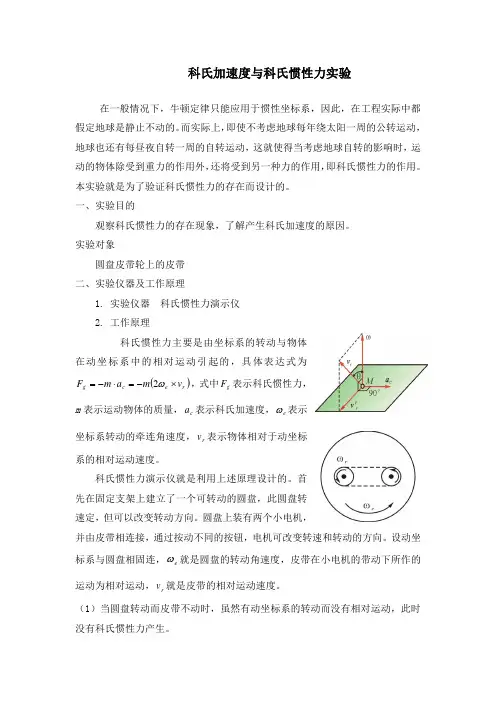
实验对象圆盘皮带轮上的皮带二、实验仪器及工作原理1. 实验仪器 科氏惯性力演示仪2. 工作原理科氏惯性力主要是由坐标系的转动与物体在动坐标系中的相对运动引起的,具体表达式为()r e c g v m a m F ⨯-=⋅-=ω2,式中g F 表示科氏惯性力,m 表示运动物体的质量,c a 表示科氏加速度,e ω表示坐标系转动的牵连角速度,r v 表示物体相对于动坐标系的相对运动速度。
科氏惯性力演示仪就是利用上述原理设计的。
首先在固定支架上建立了一个可转动的圆盘,此圆盘转速定,但可以改变转动方向。
圆盘上装有两个小电机,并由皮带相连接,通过按动不同的按钮,电机可改变转速和转动的方向。
设动坐标系与圆盘相固连,e ω就是圆盘的转动角速度,皮带在小电机的带动下所作的运动为相对运动,r v 就是皮带的相对运动速度。
(1)当圆盘转动而皮带不动时,虽然有动坐标系的转动而没有相对运动,此时没有科氏惯性力产生。
(2)当圆盘不转动而皮带作直线运动时,因只有相对运动而没有动坐标系的转动,此时也没有科氏惯性力产生。
(3)当圆盘转动,同时皮带也作直线运动时,由于动坐标系的转动和动点在动坐标系上的相对运动,即产生了科氏惯性力,它促使皮带向中间靠拢或分开 (它决定于e ω、r ω的方向)。
(4)改变相对运动速度的大小和方向,可以改变皮带向中间靠拢或分开的大小。
四、实验步骤1.仔细检查仪器的设置状态,皮带在圆盘上的位置,打开电源总开关。
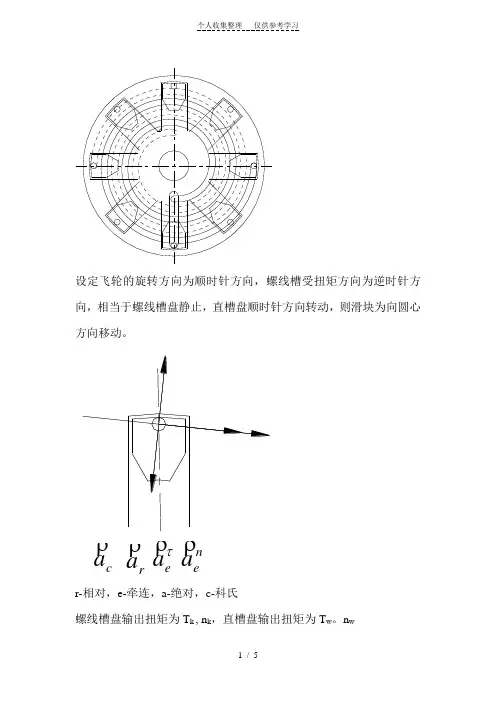
设定飞轮的旋转方向为顺时针方向,螺线槽受扭矩方向为逆时针方向,相当于螺线槽盘静止,直槽盘顺时针方向转动,则滑块为向圆心方向移动。
c a r a e a n e ar-相对,e-牵连,a-绝对,c-科氏 螺线槽盘输出扭矩为T k , n k ,直槽盘输出扭矩为T w 。
n w动点:滑块上的轴圆心动系:螺线槽圆盘绝对运动:曲线运动相对运动:螺线槽切向运动牵连运动:定轴转动c n e e r a a a a a a 1111 +++=τr a 1 ,相对运动为动点相对于螺线槽切向的角速度,不考虑径向的加速度,其大小和直槽盘该点的角加速和螺线槽盘改点的角加速度差值与半径的乘积在切线上的投影,即和β角有关,所以)tan cos()(cos )(1θααβααa r r a slot spiral slot spiral r ⋅-⋅=⋅-⋅= 方向为切线方向τe a 1 即为螺线槽盘的角加速度与半径的乘积,s p ie r a ατ⋅=1 n e a 1 即为向心加速度,21spiral n e r a ω⋅=c a 1 为)tan cos()(22θωωωωa r v slot spiral spiral r e ⋅-⋅⋅⋅=⋅⋅ 方向即为图示方向动点:滑块上的轴圆心动系:直槽圆盘绝对运动:曲线运动相对运动:径向直线运动牵连运动:定轴转动c n e e r a a a a a a +++=τr a 和半径的缩小速度有关有关,半径的公式为θa r =,所以r a 的大小和r 有关,即和θ a 有关,而θ 即为螺线盘的角减速度和直槽盘角减速度的差值,用slot spiral αα-表示,即)(slot spiral r a a αα-⋅= ,方向如图所示,指向圆心。
τe a 为牵连切向加速度,显然为直槽盘的角加速度和半径的乘积,即为slot r α⋅,方向为切向 τe a 为牵连径向加速度,公式为2slot r ω,方向指向圆心 c a 为科氏加速度,大小为)(222slot spiral slot spiral slot slot r e a a v ωωωθωω-⋅⋅⋅=⋅⋅⋅=⋅⋅- 方向为切向。
相对加速度取决于相对运动轨迹的形状,
如果是曲线,那就分法向和切向;
如果是直线,那就只有切向
牵连加速度取决于牵连运动的形式,转动还是平动
科氏加速度的方向一般可将相对速度沿角速度W
的方向旋转九十度得到。
对于相对、牵连加速度中,法相加速度不可随便画!
而未知的切向加速度可以随便画
科氏加速度方向判断:右手螺旋定则,
首先伸出右手四指弯曲的方向与角速度w相同,
大拇指所指的方向为角速度w的矢量方向,
然后用右手伸直的四指指向角速度的的方向与速度差乘,此时大拇指指向即为科氏加速度方向.。
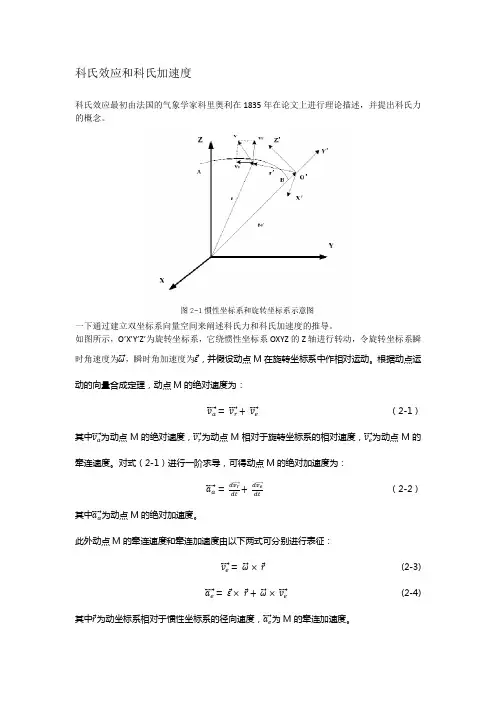
科氏效应和科氏加速度科氏效应最初由法国的气象学家科里奥利在1835年在论文上进行理论描述,并提出科氏力的概念。
一下通过建立双坐标系向量空间来阐述科氏力和科氏加速度的推导。
如图所示,O’X’Y’Z’为旋转坐标系,它绕惯性坐标系OXYZ的Z轴进行转动,令旋转坐标系瞬时角速度为ω,瞬时角加速度为ε,并假设动点M在旋转坐标系中作相对运动。
根据动点运动的向量合成定理,动点M的绝对速度为:v a=v r+ v e(2-1)其中v a为动点M的绝对速度,v r为动点M相对于旋转坐标系的相对速度,v e为动点M的牵连速度。
对式(2-1)进行一阶求导,可得动点M的绝对加速度为:a a=dv rdt + dv edt(2-2)其中a a为动点M的绝对加速度。
此外动点M的牵连速度和牵连加速度由以下两式可分别进行表征:v e=ω×r(2-3)a e=ε×r+ ω×v e(2-4) 其中r为动坐标系相对于惯性坐标系的径向速度,a e为M的牵连加速度。
对动点M 的牵连速度进行求导,可以得到一个牵连加速度的合成式,如下式所示:dv e dt =dωdt×drdt=ε×r+ ω×v e+ ω×v r=a e+ ω×v r另外,当对M的相对速度求导可得以下合成结果:dv r=a r+ ω×v r其中a r为M点的相对加速度。
将式(2-5)和(2-7)代入式(2-2)得到完整的M点绝对加速度公式:a a=dv rdt + dv edt=a r+ a e+2ω×v r(2-7)令:a k=2ω×v r则式(2-7)可以写成:a a=a r+ a e+ a k其中a k被称为后人根据克里奥立名字命名的科氏加速度,当其作用在质量上便形成了所谓的科氏力。
通过前面的论述可知,当物体的牵连运动为转动时,物体的牵连运动必要与物体的相对运动的互相作用,使物体本身具有除了绝对加速度和相对加速度这两个分量外的另一个分量——科氏加速度分量。
对科⽒加速度的认识对科⽒加速度的认识内容摘要:本⽂先简介了科⾥奥利其⼈,交代了科⽒加速度的发现过程,⼜从不同⽅⾯解释了科⽒加速度。
通过⼀些常见的⽣活常识及⽣产应⽤的举例,说明了科⾥奥利加速度的普遍性和意义。
⼀.科学家的发现科⾥奥利,法国物理学家。
1792年5⽉21⽇⽣于巴黎;1843年9⽉19⽇卒于巴黎。
科⾥奥利是巴黎⼯艺学院的教师,长期健康状况不佳,这限制了他创造能⼒的发挥。
即便如此,他的名字在物理学中仍是不可磨灭的。
1835年,他着⼿从数学上和实验上研究⾃旋表⾯上的运动问题。
地球每24⼩时⾃转⼀周。
⾚道⾯上的⼀点,在此时间内必须运⾏25,000英⾥,因此每⼩时⼤约向东运⾏1,000英⾥。
在纽约纬度地⾯上的⼀点,⼀天只需⾏进19,000英⾥,向东运⾏的速度仅约为每⼩时800英⾥。
由⾚道向北流动的空⽓,保持其较快的速度,因此相对于它下⾯运动较慢的地⾯⽽⾔会向东⾏。
⽔流的情况也是⼀样。
因此,空⽓和⽔在背向⾚道流动时好像被推向东运动,反之会向西运动,这样会形成⼀个圆!推动它们运动的⼒就称为科⾥奥利⼒。
这种⼒不是真实存在的!只是"惯性"这种性质的表现⽽已.正是这种"⼒"造成了飓风和龙卷风的旋转运动。
研究⼤炮射击、卫星发射等技术问题时,必须考虑到这种⼒。
⼆.科⽒加速度的定义科⽒加速度----是动点的转动与动点相对运动相互耦合引起的加速度。
科⽒加速度的⽅向垂直于⾓速度⽮量和相对速度⽮量。
A.理论解读物理上,“有⼒就产⽣加速度,相反有加速度就会有产⽣它的⼒”这句话,是在“惯性参照系”当中来说的。
⽽科⽒⼒(或科⽒加速度)是在⾮惯性系当中的概念。
所以它的本质上还是⼀种惯性⼒,是参照系本⾝施加给它的。
B.形象理解⽤2维的⽅式⽐较容易理解些。
设想,你坐在⼀个圆盘上,但并不知道它在转动。
这时有个球从圆⼼开始向外移动,并且圆盘和球之间⽆摩擦,这时从外⾯的参照系看球应该⾛直线,但是你坐在圆盘上看,球就在不断往⼀个⽅向弯了。
科氏加速度与科氏惯性力实验在一般情况下,牛顿定律只能应用于惯性坐标系,因此,在工程实际中都假定地球是静止不动的。
而实际上,即使不考虑地球每年绕太阳一周的公转运动,地球也还有每昼夜自转一周的自转运动,这就使得当考虑地球自转的影响时,运动的物体除受到重力的作用外,还将受到另一种力的作用,即科氏惯性力的作用。
本实验就是为了验证科氏惯性力的存在而设计的。
一、实验目的观察科氏惯性力的存在现象,了解产生科氏加速度的原因。
实验对象圆盘皮带轮上的皮带二、实验仪器及工作原理1. 实验仪器科氏惯性力演示仪2. 工作原理科氏惯性力主要是由坐标系的转动与物体在动坐标系中的相对运动引起的,具体表达式为,,F,,m,a,,m2,,v,式中F表示科氏惯性力, gcergm表示运动物体的质量,a表示科氏加速度,,表示ec坐标系转动的牵连角速度,表示物体相对于动坐标vr系的相对运动速度。
科氏惯性力演示仪就是利用上述原理设计的。
首先在固定支架上建立了一个可转动的圆盘,此圆盘转速定,但可以改变转动方向。
圆盘上装有两个小电机,并由皮带相连接,通过按动不同的按钮,电机可改变转速和转动的方向。
设动坐,标系与圆盘相固连,就是圆盘的转动角速度,皮带在小电机的带动下所作的e v运动为相对运动,就是皮带的相对运动速度。
r(1)当圆盘转动而皮带不动时,虽然有动坐标系的转动而没有相对运动,此时没有科氏惯性力产生。
(2)当圆盘不转动而皮带作直线运动时,因只有相对运动而没有动坐标系的转动,此时也没有科氏惯性力产生。
(3)当圆盘转动,同时皮带也作直线运动时,由于动坐标系的转动和动点在动坐标系上的相对运动,即产生了科氏惯性力,它促使皮带向中间靠拢或分开 (它决定于、的方向)。
,,er(4)改变相对运动速度的大小和方向,可以改变皮带向中间靠拢或分开的大小。
四、实验步骤1(仔细检查仪器的设置状态,皮带在圆盘上的位置,打开电源总开关。
2(设置只有动坐标系的转动而没有相对运动的状况,观察皮带中点的位置。
科氏加速度公式科氏加速度公式是一种测量系统的加速度的方法,是一种重要的物理原理。
该公式可以用于表达物体加速过程中的加速度。
它定义了一个物体从一个速度到另一个速度所需要时间的公式。
可以用简单的数学公式来描述它:加速度(a)= 化速度(v)/化时间(t)加速度(a)是物体速度每秒的变化量,代表的是物体的变速率。
比如一辆汽车从静止开始加速,加速度是描述汽车每秒速度增加的量,即6米每秒/秒,即6米每秒的变化量就是6米的加速度。
变化速度(v)是物体在一段时间内变化的速度,也就是物体从一点到另一点所经过的时间。
比如前面的汽车,如果从0开始加速,到达60米每秒,那么这段时间内,汽车的变化速度就是60米每秒。
变化时间(t)是描述物体加速过程中所经过时间的一个参数,比如汽车加速到60米每秒,那么这段加速过程所用时间就是变化时间。
科氏加速度公式主要用于测量物体加速过程的物理学原理,它是一种简单的物理学原理,它只需要时间和速度的变化量就可以表达物理原理。
然而,科氏加速度公式不仅仅可以用来测量物体的加速度,它还可以用来测量物体的减速度。
减速度是指物体每秒速度减少的量,也就是物体每秒减速的量。
比如一辆车从某个速度减速到静止,减速度就是这种每秒速度减少的量,即6米每秒/秒就是6米的减速度。
所以,科氏加速度公式也可以用来测量物体减速的物理原理。
科氏加速度公式的应用非常广泛,它可以用来分析物体在加速或减速过程中的物理原理,也可以用来验证一些受力相关的物理模型。
比如在航空航天、航天科学以及地震学中,科氏加速度公式都得到了广泛的应用,在科学研究中可以用来表达物体受力和加速度、减速度的变化关系。
此外,科氏加速度公式在实际生活中也有着重要的用途。
比如,在制造工业中,它可以用来测量机械设备加速、减速过程中的加速度和减速度的变化量,为设备的高效运行提供有力的保证。
此外,它还可以用来测量在许多汽车安全设备中,汽车在加速或减速过程中的安全性,以确保汽车的安全。