结构力学静定结构位移计算习题解答
- 格式:doc
- 大小:1.84 MB
- 文档页数:9
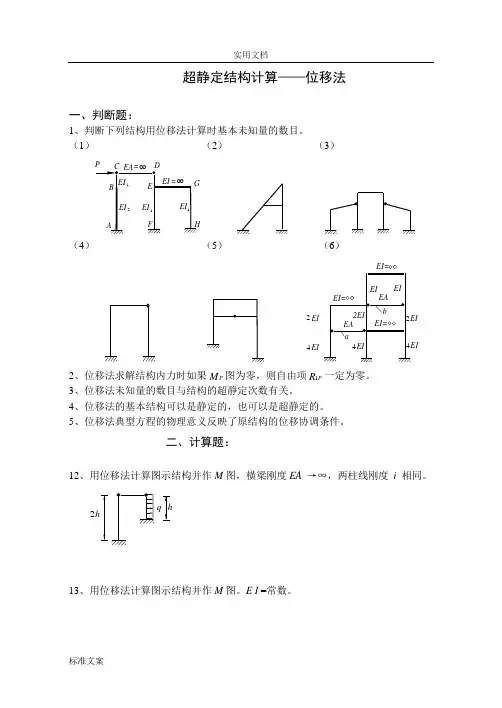
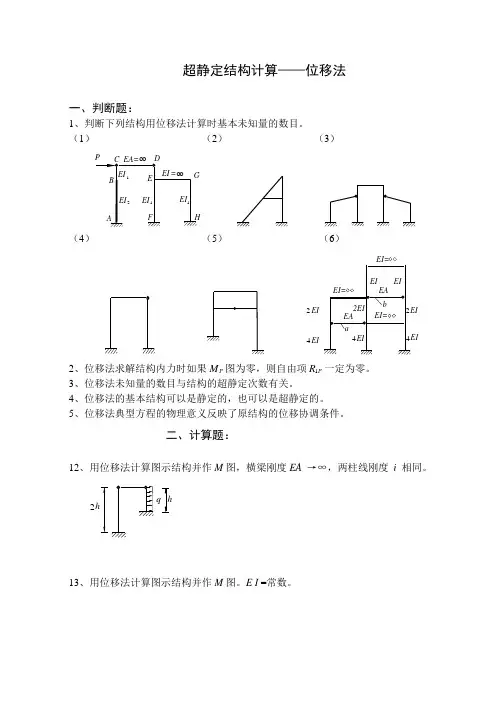
超静定结构计算——位移法一、判断题:1、判断下列结构用位移法计算时基本未知量的数目。
(1) (2) (3)(4) (5) (6)EIEIEIEI 2EI EI EIEIEA EA ab EI=EI=EI=244422、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
3、位移法未知量的数目与结构的超静定次数有关。
4、位移法的基本结构可以是静定的,也可以是超静定的。
5、位移法典型方程的物理意义反映了原结构的位移协调条件。
二、计算题:12、用位移法计算图示结构并作M 图,横梁刚度EA →∞,两柱线刚度 i 相同。
213、用位移法计算图示结构并作M 图。
E I =常数。
lll/2l/214、求对应的荷载集度q。
图示结构横梁刚度无限大。
已知柱顶的水平位移为()5123/()EI→。
12m12m 8mq15、用位移法计算图示结构并作M图。
EI =常数。
ll l l16、用位移法计算图示结构,求出未知量,各杆EI相同。
4m19、用位移法计算图示结构并作M图。
ql l20、用位移法计算图示结构并作M 图。
各杆EI =常数,q = 20kN/m 。
6m6m23、用位移法计算图示结构并作M 图。
EI =常数。
ll 224、用位移法计算图示结构并作M 图。
EI =常数。
q29、用位移法计算图示结构并作M 图。
设各杆的EI 相同。
qql l /2/232、用位移法作图示结构M 图。
E I =常数。
qql l/2l /2l36、用位移法计算图示对称刚架并作M 图。
各杆EI =常数。
l l38、用位移法计算图示结构并作M 图。
EI =常数。
ql l l l42、用位移法计算图示结构并作M 图。
2m 2m43、用位移法计算图示结构并作M 图。
EI =常数。
lll48、已知B 点的位移∆,求P 。
ll/2/2A∆51、用位移法计算图示结构并作M 图。
q超静定结构计算——位移法(参考答案)1、(1)、4; (2)、4; (3)、9; (4)、5; (5)、7;(6)、7。

第四章 静定结构位移计算一、是非题1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、用图乘法可求得各种结构在荷载作用下的位移。
5、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p 、M k 图,用图乘法求位移的结果为:()/()ωω1122y y EI +。
Mk M p21y 1y 2**ωω7、图示桁架各杆EA 相同,结点A 和结点B 的竖向位移均为零。
A8、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
aa9、图示简支梁,当P 11=,P 20=时,1点的挠度为0.01653l EI /,2点挠度为0.0773l EI /。
当P 10=,P 21=时,则1点的挠度为0.0213l EI /。
( )l10、图示为刚架的虚设力系,按此力系及位移计算公式即可求出杆AC 的转角。
C1P11、图示梁AB 在所示荷载作用下的M图面积为ql 3。
lAl /212、图示桁架结点C水平位移不等于零。
13、图示桁架中,结点C 与结点D 的竖向位移相等。
二、选择题1、求图示梁铰C 左侧截面的转角时,其虚拟状态应取:A.;;B.D.M C.=1=1=12、图示结构A 截面转角(设顺时针为正)为:A.22Pa EI / ;B.-Pa EI 2/ ;C.542Pa EI /() ;D.-542Pa EI /() 。
aa3、图示刚架l a >>0 , B 点的水平位移是:A .不定,方向取决于a 的大小;B .向左;C .等于零;D .向右。
4、图示静定多跨粱,当EI 2增大时,D 点挠度:A .不定,取决于EI EI 12;B .减小;C .不变;D .增大。
5、图示刚架中杆长l ,EI 相同,A 点的水平位移为:A.()2302M l EI /→;B.()M l EI 023/→;C.()2302M l EI /←;D.()023M l EI /←。
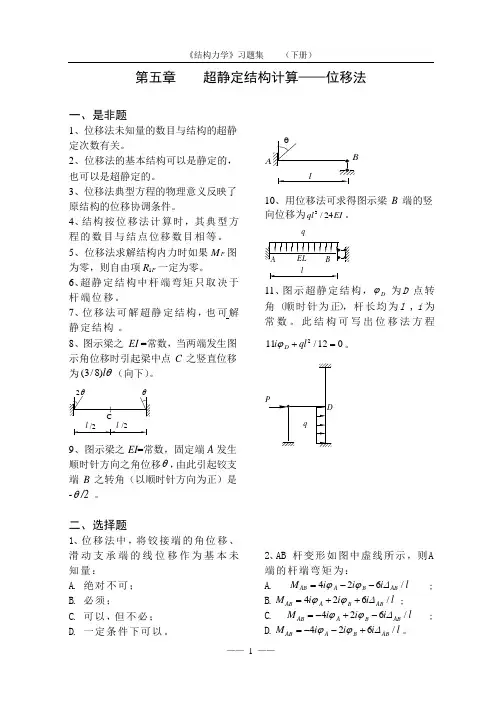
第五章 超静定结构计算——位移法一、是非题1、位移法未知量的数目与结构的超静定次数有关。
2、位移法的基本结构可以是静定的,也可以是超静定的。
3、位移法典型方程的物理意义反映了原结构的位移协调条件。
4、结 构 按 位 移 法 计 算 时 , 其 典 型 方 程 的 数 目 与 结 点 位 移 数 目 相 等 。
5、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
6、超 静 定 结 构 中 杆 端 弯 矩 只 取 决 于 杆 端 位 移 。
7、位 移 法 可 解 超 静 定 结 构 ,也 可 解 静 定 结 构 。
8、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
/2/22l l θθC9、图示梁之EI =常数,固定端A 发生顺时针方向之角位移θ,由此引起铰支端B 之转角(以顺时针方向为正)是-θ/2 。
θABl10、用位移法可求得图示梁B 端的竖向位移为ql EI 324/。
q l11、图 示 超 静 定 结 构 , ϕD 为 D 点 转 角 (顺 时 针 为 正), 杆 长 均 为 l , i 为 常 数 。
此 结 构 可 写 出 位 移 法 方 程111202i ql D ϕ+=/。
二、选择题1、位 移 法 中 ,将 铰 接 端 的 角 位 移 、滑 动 支 承 端 的 线 位 移 作 为 基 本 未 知 量 :A. 绝 对 不 可 ;B. 必 须 ;C. 可 以 ,但 不 必 ;D. 一 定 条 件 下 可 以 。
2、AB 杆 变 形 如 图 中 虚 线 所 示 , 则 A 端 的 杆 端 弯 矩 为 :A.M i i i l AB A B AB =--426ϕϕ∆/ ;B.M i i i l AB A B AB =++426ϕϕ∆/ ;C.M i i i l AB A B AB =-+-426ϕϕ∆/ ;D.M i i i l AB A B AB =--+426ϕϕ∆/。
清华⼤学《结构⼒学习题集》第三章静定结构的位移计算⼀、判断题:1、虚位移原理等价于变形谐调条件,可⽤于求体系的位移。
2、按虚⼒原理所建⽴的虚功⽅程等价于⼏何⽅程。
3、在⾮荷载因素(⽀座移动、温度变化、材料收缩等)作⽤下,静定结构不产⽣内⼒,但会有位移且位移只与杆件相对刚度有关。
4、求图⽰梁铰C 左侧截⾯的转⾓时,其虚拟状态应取:5、功的互等、位移互等、反⼒互等和位移反⼒互等的四个定理仅适⽤于线性变形体系。
6、已知M p 、M k 图,⽤图乘法求位移的结果为:()/()ωω1122y y EI +。
7、图a 、b 两种状态中,粱的转⾓?与竖向位移δ间的关系为:δ=? 。
8、图⽰桁架各杆E A 相同,结点A 和结点B 的竖向位移均为零。
9、图⽰桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
⼆、计算题:10、求图⽰结构铰A 两侧截⾯的相对转⾓?A ,EI = 常数。
11、求图⽰静定梁D 端的竖向位移 ?DV 。
EI = 常数,a = 2m 。
12、求图⽰结构E 点的竖向位移。
EI = 常数。
13、图⽰结构,EI=常数,M =?90kN m , P = 30kN 。
求D 点的竖向位移。
14、求图⽰刚架B 端的竖向位移。
15、求图⽰刚架结点C 的转⾓和⽔平位移,EI = 常数。
16、求图⽰刚架中D点的竖向位移。
EI =常数。
17、求图⽰刚架横梁中D点的竖向位移。
EI =常数。
18、求图⽰刚架中D 点的竖向位移。
E I = 常数。
19、求图⽰结构A、B两截⾯的相对转⾓,EI =常数。
20、求图⽰结构A 、B 两点的相对⽔平位移,E I = 常数。
21、求图⽰结构B 点的竖向位移,EI = 常数。
22、图⽰结构充满⽔后,求A 、B 两点的相对⽔平位移。
E I = 常数,垂直纸⾯取1 m 宽,⽔⽐重近似值取10 kN / m 3。
23、求图⽰刚架C 点的⽔平位移 ?CH ,各杆EI = 常数。

习题一.选择题4-1 与图示结构上的广义力相对应的广义位移为( C )。
A .B 点水平位移;B .A 点水平位移;C .AB 杆的转角;D .AB 杆与AC 杆的相对转角P P题4-1图题4-2图4-2 图示结构加P1F 引起位移11Δ、21Δ,再加P2F 又产生新的位移12Δ、22Δ,两个力所作的总功为( C )。
A .22P21211P1)(ΔF ΔΔF W ++=;B .22P21211P121)(ΔF ΔΔF W ++=;C .22P212P111P12121ΔF ΔF ΔF W ++=; D .)()(2221P21211P1ΔΔF ΔΔF W +++=4-3 变形体虚功原理适用于( B )。
A .线弹性体系;B .任何变形体;C .静定结构;D .杆件结构 4-4 图示结构中,位移之间的关系成立的有( D )。
A .643θθθ+=,82ΔΔ=,74θθ=;B .315θθ+=∆,86ΔΔ=,921θθθ=+C .642θθ+=∆,85ΔΔ=,93θθ=;D .642θθ+=Δ,68θ=Δ,973θθθ+=4-5 下面说法中正确的一项是(D )。
A .图乘法适用于任何直杆结构;B .虚功互等定理适用于任何结构;C .单位荷载法仅适用于静定结构;D .位移互等定理仅适用于线弹性结构 二.填充题4-6 若使图示结构的A 点竖向位移为零,则应使P1F 与P2F 的比值为P2P1/F F = 16/5。
P2题4-6图题4-7图4-7 图示结构中,AB 杆的温度上升t 度,已知线膨胀系数为α,则C 点的竖向位移为 4ALT 。
4-8 上题结构中的AB 杆,由于加热而伸长了Δ,则由此产生的C 点竖向位移为 2 。
4-9 上题结构中的AB 杆,由于制作时作长了Δ,则由此产生的C 点竖向位移为 。
三.计算题4-10 试求图示桁架A 点竖向位移。
已知各杆截面相同,22m 105.1-⨯=A ,210GPa =E 。
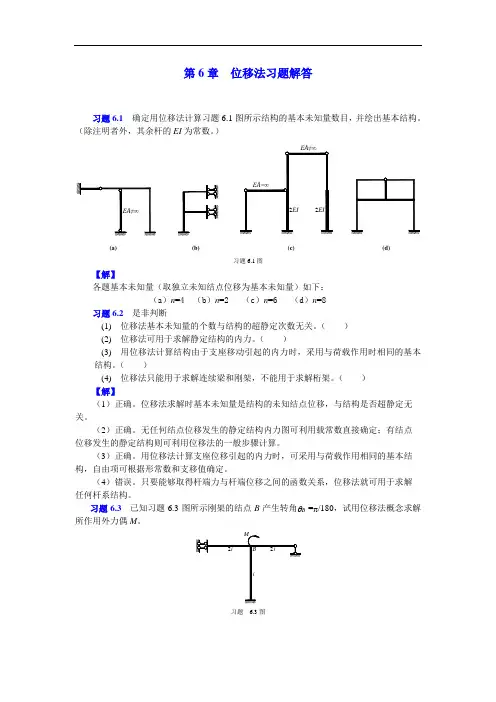
第6章位移法习题解答习题6.1确定用位移法计算习题6.1图所示结构的基本未知量数目,并绘出基本结构。
(除注明者外,其余杆的EI为常数。
)(a) (b) (c) (d)习题6.1图【解】各题基本未知量(取独立未知结点位移为基本未知量)如下:(a)n=4 (b)n=2 (c)n=6 (d)n=8习题6.2是非判断(1)位移法基本未知量的个数与结构的超静定次数无关。
()(2)位移法可用于求解静定结构的内力。
()(3)用位移法计算结构由于支座移动引起的内力时,采用与荷载作用时相同的基本结构。
()(4)位移法只能用于求解连续梁和刚架,不能用于求解桁架。
()【解】(1)正确。
位移法求解时基本未知量是结构的未知结点位移,与结构是否超静定无关。
(2)正确。
无任何结点位移发生的静定结构内力图可利用载常数直接确定;有结点位移发生的静定结构则可利用位移法的一般步骤计算。
(3)正确。
用位移法计算支座位移引起的内力时,可采用与荷载作用相同的基本结构,自由项可根据形常数和支移值确定。
(4)错误。
只要能够取得杆端力与杆端位移之间的函数关系,位移法就可用于求解任何杆系结构。
习题6.3已知习题6.3图所示刚架的结点B产生转角θB =π/180,试用位移法概念求解所作用外力偶M。
习题 6.3图【解】30i π 。
发生转角θB 时,可直接求得结点B 所连的各杆端弯矩,再由结点B 的平衡条件即可得M 。
习题6.4 若习题6.4图所示结构结点B 向右产生单位位移,试用位移法中剪力分配法的概念求解应施加的力F P 。
习题 6.4图【解】315lEI。
结点B 向右产生单位位移时,横梁所连各柱端剪力之和即为F P 。
习题6.5 已知刚架的弯矩图如习题6.5图所示,各杆EI =常数,杆长l =4m ,试用位移法概念直接计算结点B 的转角θB 。
m习题 6.5图【解】由M 图可知,BC 杆上无外荷载,其杆端弯矩为330BC BC B M i θ==-,由此求得40B EIθ=-。
超静定结构计算——位移法一、判断题:1、判断下列结构用位移法计算时基本未知量的数目。
(1) (2) (3)(4) (5) (6)EIEIEIEI 2EI EI EIEIEAEA ab EI=EI=EI=244422、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
3、位移法未知量的数目与结构的超静定次数有关。
4、位移法的基本结构可以是静定的,也可以是超静定的。
5、位移法典型方程的物理意义反映了原结构的位移协调条件。
二、计算题:12、用位移法计算图示结构并作M 图,横梁刚度EA →∞,两柱线刚度 i 相同。
213、用位移法计算图示结构并作M 图。
E I =常数。
—— 41 ——ll /2l /214、求对应的荷载集度q 。
图示结构横梁刚度无限大。
已知柱顶的水平位移为 ()5123/()EI →。
12m12m8mq15、用位移法计算图示结构并作M 图。
EI =常数。
ll ll16、用位移法计算图示结构,求出未知量,各杆EI 相同。
4m19、用位移法计算图示结构并作M 图。
qll20、用位移法计算图示结构并作M 图。
各杆EI =常数,q = 20kN/m 。
6m6m23、用位移法计算图示结构并作M 图。
EI =常数。
ll 224、用位移法计算图示结构并作M 图。
EI =常数。
q29、用位移法计算图示结构并作M 图。
设各杆的EI 相同。
qql l /2/232、用位移法作图示结构M 图。
E I =常数。
—— 43 ——qql l/2l /2l36、用位移法计算图示对称刚架并作M 图。
各杆EI =常数。
l l38、用位移法计算图示结构并作M 图。
EI =常数。
ql l l l42、用位移法计算图示结构并作M 图。
2m 2m43、用位移法计算图示结构并作M 图。
EI =常数。
lllql48、已知B 点的位移∆,求P 。
ll/2/2A∆51、用位移法计算图示结构并作M 图。
超静定结构计算——位移法(参考答案)1、(1)、4; (2)、4; (3)、9; (4)、5; (5)、7;(6)、7。
第三章静定结构的位移计算一、判断题:1、虚位移原理等价于变形谐调条件,可用于求体系的位移。
2、按虚力原理所建立的虚功方程等价于几何方程。
3、在非荷载因素(支座移动、温度变化、材料收缩等)作用下,静定结构不产生内力,但会有位移且位移只与杆件相对刚度有关。
4、求图示梁铰 C 左侧截面的转角时,其虚拟状态应取:M =1A. B.C;CM =1M =1C. D.C;C5、功的互等、位移互等、反力互等和位移反力互等的四个定理仅适用于线性变形体系。
6、已知M p、 M k图,用图乘法求位移的结果为:( 1 y1 2 y2 ) / (EI )。
1M p*2*P = 1M =1A BA Cy2BM k y1( a )(b)7、图 a、 b 两种状态中,粱的转角与竖向位移间的关系为:= 。
8、图示桁架各杆 E A 相同,结点 A 和结点 B 的竖向位移均为零。
PAP aBBaa9、图示桁架各杆EA =常数,由于荷载P 是反对称性质的,故结点B 的竖向位移等于零。
二、计算题:10、求图示结构铰 A 两侧截面的相对转角 A ,EI =常数。
qAl l l /211、求图示静定梁 D 端的竖向位移DV。
EI = 常数,a = 2m 。
10kN/mDa a a12、求图示结构 E 点的竖向位移。
EI=常数。
qEl l /3 2 l /3l /313、图示结构,EI= 常数, M 90kN m, P = 30kN 。
求 D 点的竖向位移。
MPA CBD3m 3m 3m14、求图示刚架 B 端的竖向位移。
q2EI BEI l/2Al15、求图示刚架结点 C 的转角和水平位移,EI = 常数。
qBCl/2Al16、求图示刚架中D点的竖向位移。
EI =常数。
Pl/2Dl l17、求图示刚架横梁中D点的竖向位移。
EI =常数。
qDaa a18、求图示刚架中 D 点的竖向位移。
E I = 常数。
qDll l/ 2 l/ 219、求图示结构A、B两截面的相对转角,EI =常数。
第五章 超静定结构计算——位移法一、判断题:1、判断下列结构用位移法计算时基本未知量的数目。
(1) (2) (3)(4) (5) (6)EIEIEIEI2EI EIEIEIEA EA ab EI=EI=EI=244422、位移法求解结构内力时如果P M 图为零,则自由项1P R 一定为零。
3、位移法未知量的数目与结构的超静定次数有关。
4、位移法的基本结构可以是静定的,也可以是超静定的。
5、位移法典型方程的物理意义反映了原结构的位移协调条件。
6、图示结构,当支座B 发生沉降∆时,支座B 处梁截面的转角大小为12./∆l ,方向为顺时针方向,设EI =常数。
7、图示梁之 EI =常数,当两端发生图示角位移时引起梁中点C 之竖直位移为(/)38l θ(向下)。
/2/22l l θθC8、图示梁之EI =常数,固定端A 发生顺时针方向之角位移θ,由此引起铰支端B 之转角(以顺时针方向为正)是-θ/2 。
9、用位移法可求得图示梁B 端的竖向位移为ql E I 324/。
ql二、计算题:10、用位移法计算图示结构并作M 图,各杆线刚度均为i ,各杆长均为 l 。
11、用位移法计算图示结构并作M 图,各杆长均为 l ,线刚度均为i 。
12、用位移法计算图示结构并作M 图,横梁刚度EA →∞,两柱线刚度 i 相同。
q 213、用位移法计算图示结构并作M 图。
E I =常数。
ll /2l /2第四章 超静定结构计算——力法一、判断题:1、判断下列结构的超静定次数。
(1)、 (2)、(a )(b)(3)、 (4)、(5)、 (6)、(7)、(a)(b)2、力法典型方程的实质是超静定结构的平衡条件。
3、超静定结构在荷载作用下的反力和内力,只与各杆件刚度的相对数值有关。
4、在温度变化、支座移动因素作用下,静定与超静定结构都有内力。
5、图a 结构,取图b 为力法基本结构,则其力法方程为δ111X c =。
(a)(b)X1第二章 静定结构内力计算一、判断题:1、静定结构的全部内力及反力,只根据平衡条件求得,且解答是唯一的。
6-1 求图示桁架AB 、AC 的相对转角,各杆EA 为常量。
解:(1)实状态桁架各杆的轴力如图(b )所示。
(b)(a)N(d )(c)题6-1N N(2)建立虚设单位力状态如(c )所示,求AB 杆的转角。
1113(2)82i P iAB i i P a P a P a N N l P a a a E A EA EA EA EAϕ⋅⋅⋅⋅-⋅-⋅⋅⋅==++⨯=∑(↺)(3)建立虚设单位力状态如(d )所示,求AC 杆的转角。
113(2)()(72i P i AC i iP a P a N N lPa a E A EA EA EAϕ⋅⋅⋅-⋅-⋅⋅==+⨯=∑(↺)故,AB 、AC 的相对转角为两杆转角之差:8(7(10.414AB AC P P P PEA EA EA EAϕϕϕ+-=-=-==-(夹角减小)6-2 求半圆曲梁中点K 的竖向位移。
只计弯曲变形。
EI 为常数。
方法一 解:(1)荷载作用下的实状态的约束反力如图(a )所示。
以任意半径与水平坐标轴的顺时针夹角为自变量,其弯矩方程为:sin (0)P M θθπ=-≤≤Pr(2)建立虚设单位力状态如(b )所示,其弯矩方程为:[]1cos )(0)2211cos()cos )()222i M πθθππθθθπ⎧≤≤⎪⎪=⎨⎪-=≤≤⎪⎩(r -r r -r (r +r(a)题6-2(3)积分法求半圆曲梁中点K 的竖向位移。
20233220022311cos )(sin )cos )(sin )2211cos )sin cos )sin sin sin 2)sin sin 2)2222cos 2i V Pk Pr Pr M M ds rd rd EIEI EI Pr Pr d d d d EI EI Pr EI πππππππππθθθθθθθθθθθθθθθθθθθ⋅-⋅-⋅∆==+⎡⎤⎡⎤=-⋅+⋅=-+⋅⎢⎥⎢⎥⎣⎦⎣⎦=-∑⎰⎰⎰⎰⎰⎰⎰(r -r (r +r (-(+(-(+(-11320211cos 2)cos cos 2)442Pr EI πππθθθ⎡⎤⎢⎥+-+=-↑⎢⎥⎣⎦()( 方法二:本题也可以只算纵向对称轴左边,再乘2。
题6-2(a)2033220033201sin )(Pr cos )221sin )cos cos sin 2)21sin cos 2)42i VP k M M ds rd EI EIPr Pr d d EI EI Pr Pr EI EI ππππθθθθθθθθθθθ⋅-⋅∆===-⋅=-=-+=-↑∑⎰⎰⎰⎰()(r -r (-(-(1 6-3 求梁的自由端的挠度。
EI 为常数。
方法一 :(积分法) 解:(1)荷载作用的实状态,以及坐标如图(a ),其弯矩方程为:()21(0)2M x qlx qx x l =--≤<(2)建立虚设单位力状态,以及坐标如图(b )所示,其弯矩方程为:()(0)i M x xx l =-≤<(3)积分法求梁自由端的竖向位移VB ∆。
方法二:(图乘法)6-4 求图示梁支座B 左右两侧截面的相对转角。
EI =常数。
题6-4M i (c)(b)M P解:(1)荷载作用的实状态,其弯矩图如图(b )所示。
(2)建立虚设单位力状态, 其弯矩图如图(c )所示。
(3)图乘梁(b )、(c )求自由端的竖向位移VB ∆223121115()38224248i iB y ql ql ql l l EI EI EIωϕ⋅==-⨯⨯⨯-⨯⨯⨯=∑(↺↻) (b)(a)题6-32023043401()()21)21111)3824li V PB l lx qlx qx MM dx dxEIEIq lx x dx EI q ql lx x EI EI -⋅--⋅∆===⋅==+=↓∑⎰⎰⎰()(+()↓题6-3M i 图M P (a)(b)(c)6-5求图示悬臂梁的自由端的挠度。
523.8410kN m EI =⨯⋅。
(a)(c)(m)M i 图(kN ·M P 图(b)解:(1)荷载作用的实状态,其弯矩图如图(b )所示。
(2)建立虚设单位力状态, 其弯矩图如图(c )所示。
(3)图乘梁(b )、(c )求自由端的竖向位移VC ∆3511122112(404(84)480(84)(4044)(4102)22333365606560 5.6910(m) 5.69mm()33 3.8410V i iC y EI EI EI EI EI ω-⋅⎡⎤∆==⨯⨯⨯+-⨯⨯⨯⨯+⨯+⨯⨯-⨯⨯⨯⨯⎢⎥⎣⎦===⨯=↓⨯⨯∑6-6 求简支梁中点K 的竖向位移。
EI =常数。
M i(b)M P题6-64解:(1)荷载作用的实状态,其弯矩图如图(b )所示。
(2)建立虚设单位力状态, 其弯矩图如图(c )所示。
(3)图乘梁(b )、(c )求自由端的竖向位移VK ∆22241311122()()()3164222883232848V i iky ql l l l ql l l ql l ql EI EI EI EI EIω⋅∆==⨯⨯⨯⨯+⨯⨯⨯⨯+⨯⨯⨯⨯=↓∑6-7 求图示刚架结点K 的转角。
E =常数。
题6-7(b)(c)解:(1)荷载作用的实状态,其弯矩图如图(b )所示。
(2)建立虚设单位力状态, 其弯矩图如图(c )所示。
(3)图乘梁(b )、(c )求自由端的竖向位移K ϕ222233333111111121()()()()34422434423438425()96896192192i iK y ql ql ql ql l l l l EI E I EI E I E I ql ql ql ql ql EI EI EI EI EIωϕ⋅==-⨯⨯⨯+⨯⨯⨯+⨯⨯⨯+⨯⨯⨯⨯⋅⋅⋅=-+++=↵∑6-8求图示三铰刚架D 、E 两点的相对水平位移和铰C 两侧截面的相对转角。
EI =常数。
解:(1)荷载作用的实状态,其弯矩图如图(b )所示。
(2)建立虚设单位力状态, 其弯矩图如图(c )、(d )所示。
(3)图乘梁(b )、(c )求自由端的竖向位移HDE ∆241112()()()242864H i iDEy l ql ql l EI EI EIω⋅∆==-⨯⨯⨯⨯⨯⨯=-←→∑(4)图乘梁(b )、(d )求铰C 两侧截面的相对转角C ϕ 方法一:22231112(1)21(1)388388i iC y ql ql ql ql l l l EI EI EI EI EIωϕ⋅==-⨯⨯⨯⨯-⨯⨯⨯+⨯⨯⨯⨯=-∑(↻↺) 方法二:实状态时C 处剪力为零223111(1)2(1)2383828i iC y ql ql l ql l EI EI EI EIωϕ⋅==-⨯⨯⨯⨯-⨯⨯⨯⨯⨯=-∑(↻↺) 6-10 求图示刚架结点K 的竖向位移。
62310kN m EI =⨯⋅。
题6-10解:(1)荷载作用的实状态,其弯矩图如图(b )所示。
(2)建立虚设单位力状态, 其弯矩图如图(c )所示。
(3)图乘梁(b )、(c )求自由端的竖向位移VK ∆3611111221236012618063(6180)9(1806)(1212)(645)93322233231728017280 5.4910() 5.49()310V i i C y EI EI EI E I EI EI m mm EI ω-⋅∆==-⨯⨯⨯-⨯⨯⨯-⨯⨯⨯-⨯⨯⨯⨯⨯-⨯+⨯⨯⨯⨯⋅=-=-=-⨯=-↓⨯∑6-15 求图示组合结构K 的竖向位移。
EA =常数、EI =常数。
(a)12a21(f )12P2IPP 、P2PPa2题6-15212PP221解:(1)荷载作用的实状态如图(a) 所示;用I-I 截面切开三链杆取右边为研究对象如图(b) 所示,并求出此三链杆的轴力;其弯矩图如图(d )所示。
(2)建立虚设单位力状态如图(e) 所示;切开三链杆取右边为研究对象如图(f) 所示,并求出此三链杆的轴力;其弯矩图如图(h )所示。
(3)图乘梁(b )、(c )求自由端的竖向位移VK ∆111()()1122()334i V i i P Ky N N EI EA EI EI EA EA EA EA ω⨯⨯-⨯⨯⨯-⨯⋅⋅∆=+=⨯⨯⨯⨯-⨯⨯⨯⨯+++=-↑∑∑梁式杆链杆222222()()2222P P P a a aPa a Pa a Pa a a6-17图示三铰刚架内部温度升高t o C ,材料的线膨胀率为α。
求中间铰C 的竖向位移。
各杆截面高度h 相同,EI =常数。
题6-17图(b)h解:(1)实状态如图(a)所示,刚架内外侧温度差't t C=o,轴线温度升高02tt=Co(2)建立虚设单位力状态,1124N N N=-==-左右梁, 其弯矩图如图(b)所示。
(3)图乘梁(a)、(b)求中间铰C的竖向位移'2211112()()(22)222424242535335()8888/108i iVC N Mttht t t l l ll l lhtl tl tl tl tlh lααωωαααααααα∆=±±⨯=-⨯⨯⨯⨯-⨯⨯⨯-⨯⨯⨯⨯+⨯⨯⨯=--=--=-↑∑∑6-20 图示桁架中杆件AK在制造时比原设计长度做长了5mm,求由此引起的K点的水平位移。
题6-20图解:(1)实状态如图(a)所示,桁架中AK杆在制造时比原设计长度做长了5mm。
(2)建立虚设单位力状态,先求出反力,再利用结点法求出该状态AK杆的轴力。
(3)图乘梁(a)、(b)求中间铰C的竖向位移5 5.5355()()VC iN∆=±⋅∆==→∑mm6-22 图示刚架支座A发生水平位移1∆、竖向位移2∆及顺时针向转角φ,求由此引起的刚结点K的水平位移。
φ(a)△M解:①实位移状态如图6-22(a )所示。
②沿水平方向虚设单位力1=i P ,虚力状态如图6-22(b )所示。
1()01A A A X Y M l l =←==⨯=(↺)③由刚体的可能功方程,有:110H k A A X M ϕ⋅∆-⋅∆-⋅=1H C l ϕ∆=∆+→()。