理论力学课后习题答案 第6章 刚体的平面运动分析(2020年7月整理).pdf
- 格式:pdf
- 大小:497.30 KB
- 文档页数:8
第六章 分析力学滔滔长江东逝水,浪花淘尽英雄。
达朗贝尔,拉格朗日,哈密顿等许多前贤相聚于此“力学论剑”,其“冲击波”使非线性问题也不攻自破。
长江后浪推前浪,你或许在此能够加倍“忘乎因此‘。
微分方程将叱咤风云。
[要点分析与总结]1虚功原理:(平稳时)理想条件下,力学系的平稳条件是各质 点上的主动力所作的虚功之和为零:10ni i i W F r δδ==•=∑用广义坐标来表述:310n ii i x W F q q ααδδ=∂==∂∑ 2达朗贝尔原理(动力学下的虚功原理): 1()0ni i i i i W F m r r δδ==-•=∑〈析〉r δ,W δ均是在时刻未转变(0dt =)时所假想的量,而广义坐标a q 能够是角度,长度或其它的独立的坐标变量。
3拉格朗日方程()d T TQ dt q q ααα∂∂-=∂∂ (1,2,3,,)a s =在保守力下,取拉氏数 L T V =-方程为:()0d L L dt q q αα∂∂-=∂∂ 假设拉氏数中L 不显含广义坐标q β,那么:0Lq β∂=∂ 即 循环积分: Lp const q ββ∂==∂ 4微振动非线性系统在小角度近似下,对拉氏方程的应用 5哈密顿函数与正那么方程 (1) 哈密顿函数1(,,)sH p q t L p q ααα==-+∑式中T Lp q q ααα∂∂==∂∂为广义坐标动量 (2) 正那么方程Hq P Hp q H Lt tαααα∂=∂∂=-∂∂∂=-∂∂ (1,2,3,,)a s =假设哈氏函数H 中不显含广义坐标q β,那么:0Hp q ββ∂=-=∂ 即:循环积分 Tp const q ββ∂==∂ 在稳固条件下(H 中不显含t ),12sp q T ααα==∑那么有能量积分:H T V =+6泊松括号1[,]()sG H G HG H q p p q ααααα=∂∂∂∂=-∂∂∂∂∑ 7哈密顿原理与正那么变换 (1)哈密顿原理保守力系下:210t t Ldt δ=⎰概念:21t t S Ldt =⎰为主函数(3) 正那么变换通过某种变数的变换,找到新的函数*H ,使正那么方程的形式不变(相当于坐标变换)。
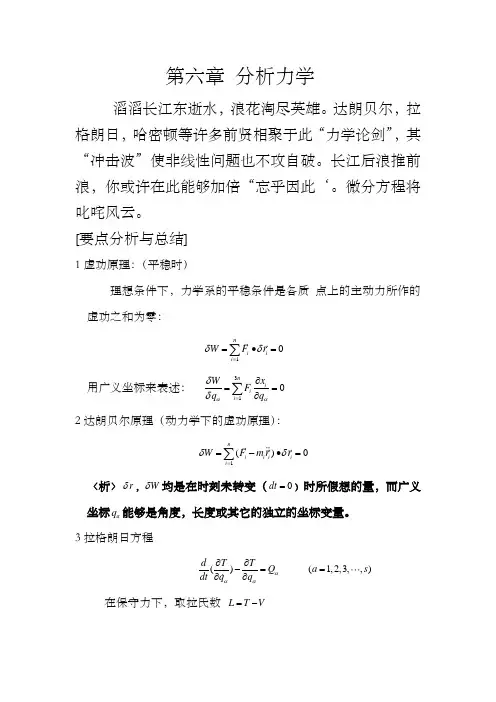
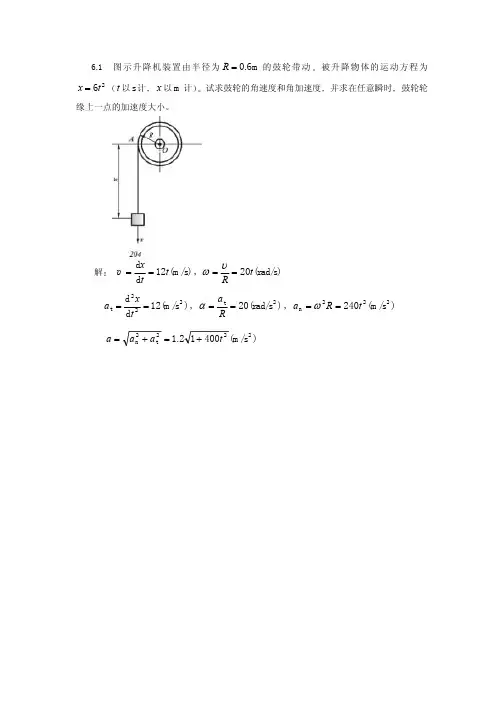
第6章 刚体的平面运动分析6-1 图示半径为r 的齿轮由曲柄OA 带动,沿半径为R 的固定齿轮滚动。
曲柄OA 以等角加速度α绕轴O 转动,当运动开始时,角速度0ω= 0,转角0ϕ= 0。
试求动齿轮以圆心A 为基点的平面运动方程。
解:ϕcos )(r R x A += (1) ϕsin )(r R y A +=(2)α为常数,当t = 0时,0ω=0ϕ= 0 221t αϕ=(3)起始位置,P 与P 0重合,即起始位置AP 水平,记θ=∠OAP ,则AP 从起始水平位置至图示AP 位置转过θϕϕ+=A因动齿轮纯滚,故有⋂⋂=CP CP 0,即 θϕr R = ϕθr R =, ϕϕrr R A += (4)将(3)代入(1)、(2)、(4)得动齿轮以A 为基点的平面运动方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+=+=+=222212sin )(2cos )(t r r R t r R y t r R x A A A αϕαα6-2 杆AB 斜靠于高为h 的台阶角C 处,一端A 以匀速v 0沿水平向右运动,如图所示。
试以杆与铅垂线的夹角θ 表示杆的角速度。
解:杆AB 作平面运动,点C 的速度v C 沿杆AB 如图所示。
作速度v C 和v 0的垂线交于点P ,点P 即为杆AB 的速度瞬心。
则角速度杆AB 为6-3 图示拖车的车轮A 与垫滚B 的半径均为r 。
试问当拖车以速度v 前进时,轮A 与垫滚B 的角速度A ω与B ω有什么关系?设轮A 和垫滚B 与地面之间以及垫滚B 与拖车之间无滑动。
解:RvR v A A ==ωR v R v B B 22==ωB A ωω2=6-4 直径为360mm 的滚子在水平面上作纯滚动,杆BC 一端与滚子铰接,另一端与滑块C 铰接。
设杆BC 在水平位置时,滚子的角速度ω=12 rad/s ,θ=30︒,ϕ=60︒,BC =270mm 。
试求该瞬时杆BC 的角速度和点C 的速度。
hv AC v AP v ABθθω2000cos cos ===习题6-1图ABCv 0hθ习题6-2图PωABv CABCv ohθ习题6-2解图习题6-3解图习题6-3图v A = vv B = v ωAωB习题6-6图习题6-6解图解:杆BC 的瞬心在点P ,滚子O 的瞬心在点D BDv B ⋅=ωBPBD BP v B BC ⋅==ωω ︒︒⨯=30sin 27030cos 36012 rad/s 8=PC v BC C ⋅=ωm/s 87.130cos 27.08=︒⨯=6-5 在下列机构中,那些构件做平面运动,画出它们图示位置的速度瞬心。

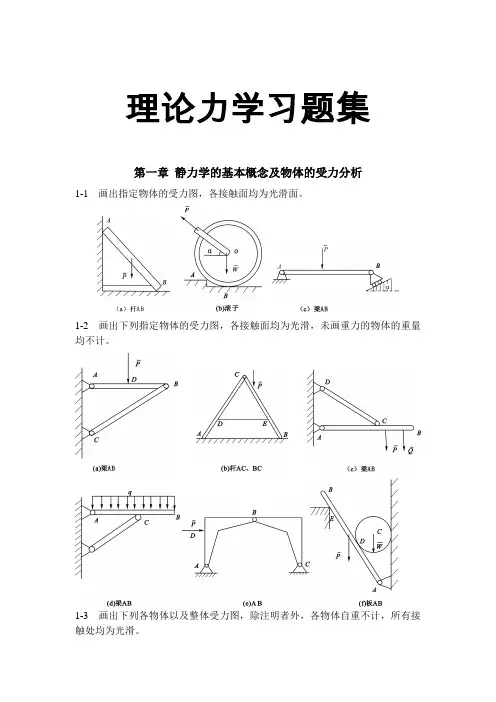
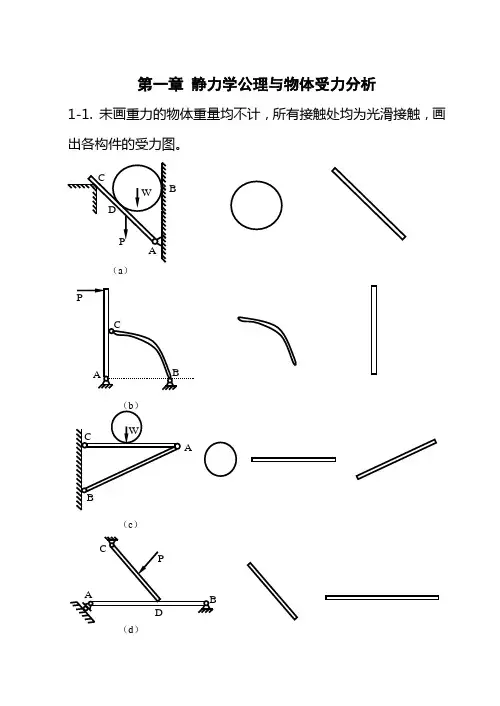
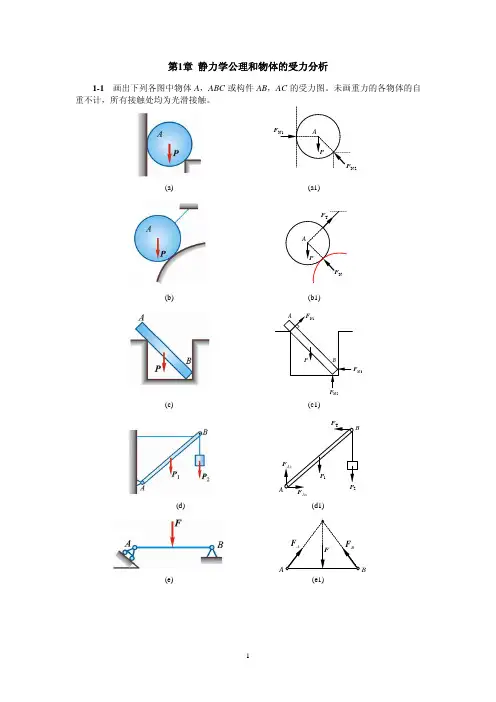
理论力学习题集第一章静力学的基本概念及物体的受力分析1-1 画出指定物体的受力图,各接触面均为光滑面。
1-2 画出下列指定物体的受力图,各接触面均为光滑,未画重力的物体的重量均不计。
1-3 画出下列各物体以及整体受力图,除注明者外,各物体自重不计,所有接触处均为光滑。
(a) (b)(c) (d)(e) (f)第二章平面一般力系2-1 物体重P=20kN,用绳子挂在支架的滑轮B上,绳子的另一端接在铰车D 上,如图所示。
转动铰车,物体便能升起,设滑轮的大小及滑轮转轴处的摩擦忽略不计,A、B、C三处均为铰链连接。
当物体处于平衡状态时,试求拉杆AB和支杆CB所受的力。
2-2 用一组绳悬挂重P=1kN的物体,求各绳的拉力。
2-3 某桥墩顶部受到两边桥梁传来的铅直力P1=1940kN,P2=800kN及制动力T=193kN,桥墩自重W=5280kN,风力Q=140kN。
各力作用线位置如图所示,求将这些力向基底截面中心O简化的结果,如能简化为一合力,试求出合力作用线的位置。
2-4 水平梁的支承和载荷如图所示,试求出图中A、B处的约束反力。
2-5 在图示结构计算简图中,已知q=15kN/m,求A、B、C处的约束力。
2-6 图示平面结构,自重不计,由AB、BD、DFE三杆铰接组成,已知:P=50kN,M=40kN·m,q=20kN/m,L=2m,试求固定端A的反力。
图2-6 图2-72-7 求图示多跨静定梁的支座反力。
2-8 图示结构中各杆自重不计,D、E处为铰链,B、C为链杆约束,A为固定端,已知:q G=1kN/m,q=1kN/m,M=2kN·m,L1=3m,L2=2m,试求A、B、C 处约束反力。
图2-8 图2-92-9 支架由两杆AO、CE和滑轮等组成,O、B处为铰链,A、E是固定铰支座,尺寸如图,已知:r=20cm,在滑轮上吊有重Q=1000N的物体,杆及轮重均不计,试求支座A和E以及AO杆上的O处约束反力。
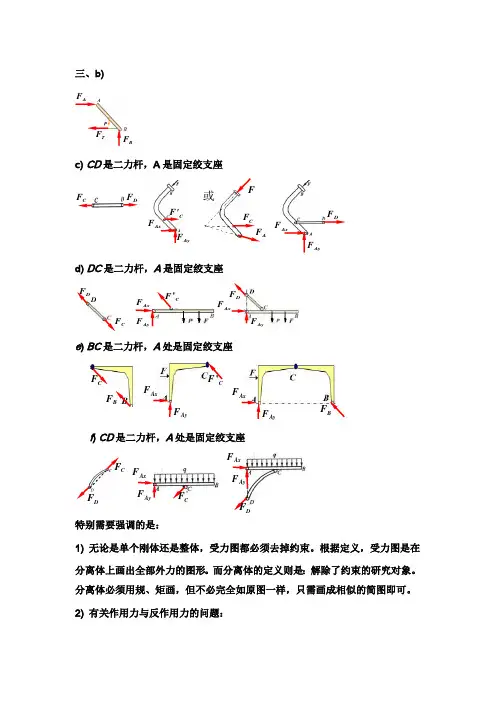
三、b)c) CD 是二力杆,A 是固定绞支座d) DC 是二力杆,A 是固定绞支座e ) BC 是二力杆,A 处是固定绞支座f ) CD 是二力杆,A 处是固定绞支座特别需要强调的是:1) 无论是单个刚体还是整体,受力图都必须去掉约束。
根据定义,受力图是在分离体上画出全部外力的图形。
而分离体的定义则是:解除了约束的研究对象。
分离体必须用规、矩画,但不必完全如原图一样,只需画成相似的简图即可。
2) 有关作用力与反作用力的问题:AyF Ax F 'C F CDF AyF AxF DF CF BFAyF AxF CF 'AyF AxF BF CF 'AyF Ax F DF AyF AxF DF CF AF FCF 或AyF AxF C 'F AyF AxF DF DF CF AF B F TFa ) 习惯上,先找出二力杆,并标示一约束反力(如F D ,将其认为是作用力)。
在另一受力图上的相联点(如D 点),然后根据作用力与反作用力定律确定的约束反力当作反作用力,标示为F'D 。
其中,符号 ' 是为了表示它是F D 的反作用力。
所以,它是有确切含义的。
标注符号时,要注意先后顺序,先确定的约束反力不标注 ' 符号,后确定的约束反力一定要标注符号 ' 。
两者必须成对、反向画。
b ) 为了明确地表示两者的作用力与反作用力关系,两个力的下脚标必须一致,如上述的D 。
不能随手写其它符号,以免产生误解。
下脚标通常用该点的符号表示,不宜象中学物理中那样,标示成数字。
3) 整体受力图一般最后画,整体受力图上的约束反力,应该与各单个刚体上已经画出的约束反力方向一致,以免产生岐义。
一、b ) k 点是光滑面约束,A 是光滑铰链,B 、O 是固定铰支座。
c ) 先确定斜杆(标注为DE )是二力杆,A 是固定绞支座,B 是可动绞支座。
BC 杆带铰,C 铰与AC 杆上C 孔铰接,力F 作用在铰上。

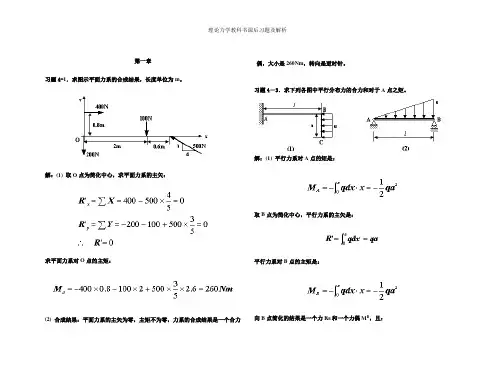
第一章习题4-1.求图示平面力系的合成结果,长度单位为m。
解:(1) 取O点为简化中心,求平面力系的主矢:求平面力系对O点的主矩:(2) 合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力偶,大小是260Nm,转向是逆时针。
习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
解:(1) 平行力系对A点的矩是:取B点为简化中心,平行力系的主矢是:平行力系对B点的主矩是:向B点简化的结果是一个力R B和一个力偶M B,且:如图所示;将R B向下平移一段距离d,使满足:最后简化为一个力R,大小等于R B。
其几何意义是:R的大小等于载荷分布的矩形面积,作用点通过矩形的形心。
(2) 取A点为简化中心,平行力系的主矢是:平行力系对A点的主矩是:向A点简化的结果是一个力R A和一个力偶M A,且:如图所示;将R A向右平移一段距离d,使满足:最后简化为一个力R,大小等于R A。
其几何意义是:R的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
习题4-4.求下列各梁和刚架的支座反力,长度单位为m。
解:(1) 研究AB杆,受力分析,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:反力的实际方向如图示。
校核:结果正确。
习题4-5.重物悬挂如图,已知G=1.8kN,其他重量不计;求铰链A的约束反力和杆BC所受的力。
解:(1) 研究整体,受力分析(BC是二力杆),画受力图:列平衡方程:解方程组:反力的实际方向如图示。
习题4-8.图示钻井架,G=177kN,铅垂荷载P=1350kN,风荷载q=1.5kN/m,水平力F=50kN;求支座A的约束反力和撑杆CD所受的力。
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
8-1 图示四杆机构1OABO 中,AB B O OA 211==;曲柄OA 的角速度s rad /3=ω。
求当090=ϕ而曲柄B O 1重合于1OO 的延长线上时,杆AB 和曲柄B O 1的角速度。
参考答案:因OA 杆作定轴转动,故OA v A ⋅=ω。
AB 杆做平面运动其速度瞬心为O 点,s rad OAv AAB /3===ωω,而OA OB v AB B ⋅=⋅=ωω3, 所以s rad s rad BO OAB O v B B O /2.5/3333111≈==⋅==ωωω(逆时针)8-2 四连杆机构中,连杆AB 上固联一块三角板 ABD 。
机构由曲柄A O 1带动。
已知:曲柄的角速度s rad A O /21=ω;曲柄cm A O 101=,水平距离cm O O 521=;AD=5cm ,当A O 1铅垂时,AB 平行于21O O ,且AD 与1AO 在同一直线上;角030=ϕ。
求三角板ABD 的角速度和D 点的速度。
参考答案:三角板 ABD C ,由此可得:s rad ctg O O AO AO AC v A O A/07.121111=⋅+⋅==ϕωωs cm CD v D /35.25=⋅=ω8-7 如图所示,在振动机构中,筛子的摆动由曲柄连杆机构所带动。
已知曲柄OA 的转速cm OA r n 30min,/40==。
当筛子BC 运动到与点O 在同一水平线上时,090=∠BAO ,求此瞬时筛子BC 的速度。
解:由图示机构知BC 作平行移动,图示位置时,B v 与CBO 夹角为30°,与AB 夹角为60°。
Av Bv Dv Av CωAv Bv由题意知 m/s π40.030.03040π=⨯⨯=⋅=OA v A ω 由速度投影定理 AB B AB A v v )()(= 得 ︒=60cos B A v vm/s 2.51π8.060cos ==︒==AB BC v v v8-6 图示机构中,已知cm EF cm DE cm BD cm OA 310,10,10,10==== OA ωs rad /4=,在图示位置,曲柄OA 与水平线OB 垂直,且B 、D 和F 在同一铅直线上。
6-1在图示四连杆机构中,已知:匀角速度O ω,OA =B O 1=r 。
试求在°=45ϕ且AB ⊥B O 1的图示瞬时,连杆AB 的角速度AB ω及B 点的速度。
解:连杆AB 作平面运动,由基点法得BA A B v v v +=由速度合成的矢量关系,知φcos v A BA =v杆AB 的角速度)(/AB /O BA AB 2122+==ωωv (逆时针)B 点的速度2245/r cos v O A B ω=°=v (方向沿AB )6-2. 在图示四连杆机构中,已知:3.021===L B O OA m ,匀角速度2=ωrad/s 。
在图示瞬时,11==L OB m ,且杆OA 铅直、B O 1水平。
试求该瞬时杆B O 1的角速度和角加速度。
解:一.求1ω60230..OA v A =×=⋅=ω m/s取A 为基点,则有BA A B v v v += 得 23.0/6.0ctg v v A B ===ϕ m/sm09.2)3.01()3.0/6.0(sin /v v 2/122A BA =+×==ϕ杆B O 1的角速度67630211../BO /v B ===ω rad/s 顺时针 二.求1ε取点A 为基点,则有n BA A a a a a a ++=+ττBA nB B将上式向X 轴投影21222857s /m .B O /ctg v )sin AB /v (OA ctg a )sin /a (a a a sin a cos a sin a BBA n B n BA A B nBA A n B B +=⋅+⋅+⋅−=++−=−=+−ϕϕωϕϕϕϕϕττ杆B O 1的角加速度7.1923.0/8.57/11===B O a B τεrad/s 2逆时针6-3.图示机构中,已知:OA =0.1m , DE =0.1m ,m 31.0=EF ,D 距OB 线为h=0.1m ;rad 4=OA ω。