第8章传递函数矩阵的矩阵分式描述
- 格式:ppt
- 大小:640.00 KB
- 文档页数:67
传递函数阵传递函数矩阵指的是在多输入、多输出线性时不变系统下,将系统各个输入与各个输出之间的关系统一表示为矩阵的形式。
该矩阵被称为传递函数矩阵。
系统的物理特性可以用数学模型来描述,通常采用微分方程的形式来表示。
而当系统具有多个输入和多个输出时,为了方便描述,我们可以采用矩阵的形式表示系统的状态,即将状态向量、输入向量和输出向量都表示为矩阵的形式:$$\mathbf{x} = \begin{bmatrix} x_1 \\ x_2 \\ \vdots \\ x_n \end{bmatrix} , \quad\mathbf{u} = \begin{bmatrix} u_1 \\ u_2 \\ \vdots \\ u_m \end{bmatrix} , \quad\mathbf{y} = \begin{bmatrix} y_1 \\ y_2 \\ \vdots \\ y_p \end{bmatrix}$$其中$\mathbf{x}$表示状态量矩阵,$\mathbf{u}$表示输入量矩阵,$\mathbf{y}$表示输出量矩阵。
$n, m, p$分别表示状态量、输入量和输出量的个数。
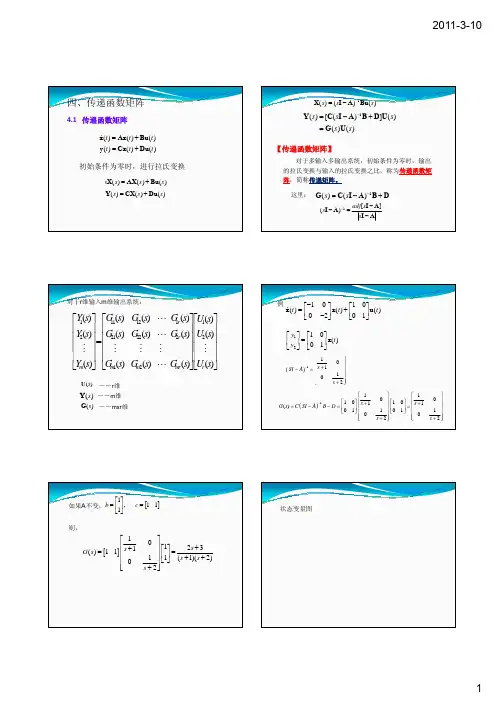
在线性时不变系统中,系统的状态方程可用矩阵形式表示:$$\begin{aligned}\dot{\mathbf{x}} &= \mathbf{Ax}+\mathbf{Bu} \\\mathbf{y} &= \mathbf{Cx}+\mathbf{Du}\end{aligned}$$我们可以根据线性时不变系统的传输特性,将输入矩阵$\mathbf{B}$和直流增益矩阵$\mathbf{D}$组成一个$m\times p$的矩阵,称为传递函数矩阵$\mathbf{G}(s)$:其中,$\mathbf{G}_{ij}(s)$表示第$i$个输入对第$j$个输出的传递函数。
传递函数矩阵$\mathbf{G}(s)$反映了系统各个输入与各个输出之间的传递特性。
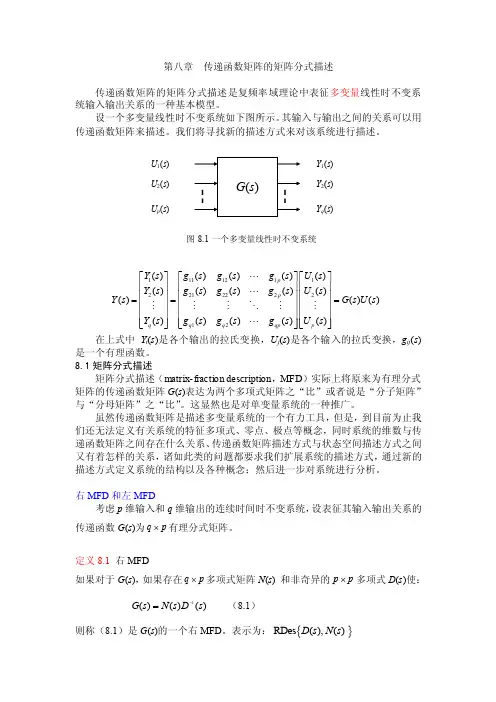
第八章 传递函数矩阵的矩阵分式描述传递函数矩阵的矩阵分式描述是复频率域理论中表征多变量线性时不变系统输入输出关系的一种基本模型。
设一个多变量线性时不变系统如下图所示。
其输入与输出之间的关系可以用传递函数矩阵来描述。
我们将寻找新的描述方式来对该系统进行描述。
1111211221222212()()()()()()()()()()()()()()()()()()p p q q q qp p Y s g s g s g s U s Y s g s g s g s U s Y s G s U s Y s g s g s g s U s ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦在上式中Y i (s )是各个输出的拉氏变换,U j (s )是各个输入的拉氏变换,g ij (s )是一个有理函数。
8.1矩阵分式描述矩阵分式描述(matrix-fraction description ,MFD )实际上将原来为有理分式矩阵的传递函数矩阵G (s )表达为两个多项式矩阵之“比”或者说是“分子矩阵”与“分母矩阵”之“比”。
这显然也是对单变量系统的一种推广。
虽然传递函数矩阵是描述多变量系统的一个有力工具,但是,到目前为止我们还无法定义有关系统的特征多项式、零点、极点等概念,同时系统的维数与传递函数矩阵之间存在什么关系、传递函数矩阵描述方式与状态空间描述方式之间又有着怎样的关系,诸如此类的问题都要求我们扩展系统的描述方式,通过新的描述方式定义系统的结构以及各种概念;然后进一步对系统进行分析。
右MFD 和左MFD考虑p 维输入和q 维输出的连续时间时不变系统,设表征其输入输出关系的传递函数G (s )为p q ⨯有理分式矩阵。
定义8.1 右MFD如果对于G (s ),如果存在p q ⨯多项式矩阵N (s ) 和非奇异的p p ⨯多项式D (s )使:)()()(1s D s N s G -= (8.1)则称(8.1)是G (s )的一个右MFD 。

传递函数部分分式展开留数矩阵留数矩阵是在复变函数中常常使用的一种工具,它可以帮助我们求解函数的部分分式展开。
在这篇文章中,我们将介绍留数矩阵的概念,以及如何使用留数矩阵来进行部分分式展开的计算。
留数矩阵是由函数的留数构成的矩阵。
在复变函数中,留数是指函数在某一点处的围道积分的值。
对于一个简单的闭合曲线,函数在其中的留数可以通过计算曲线内部的奇点来确定。
留数矩阵可以将函数的所有留数按照一定的顺序排列成一个矩阵。
在进行部分分式展开时,我们通常会遇到一个有理函数,即分子和分母都是多项式的函数。
我们的目标是将这个有理函数表示为一系列简单的分式之和。
例如,我们可能希望将一个二次函数展开为两个一次函数的和。
在这种情况下,我们可以使用留数矩阵来进行计算。
我们需要找出有理函数的所有奇点,即分母为零的点。
然后,我们可以计算这些奇点处的留数,并将它们按照一定的顺序排列成一个留数矩阵。
接下来,我们可以使用留数矩阵来确定部分分式展开的系数。
假设我们要将一个有理函数展开为一系列一次函数的和。
我们可以使用留数矩阵的方法来进行计算。
首先,我们找出有理函数的所有一次奇点,并计算它们处的留数。
然后,我们将这些留数按照一定的顺序排列成一个留数矩阵。
接下来,我们可以通过计算留数矩阵的逆矩阵来确定部分分式展开的系数。
具体来说,我们可以将逆矩阵的第一行与有理函数相乘,得到一个一次函数。
然后,我们用逆矩阵的第二行与有理函数相乘,得到另一个一次函数。
以此类推,直到得到所有的一次函数。
通过使用留数矩阵的方法,我们可以将一个有理函数展开为一系列简单的分式之和。
这种方法可以帮助我们简化复杂的函数,并提高计算的效率。
同时,留数矩阵也是解析几何和复分析等领域中重要的工具。
总结起来,留数矩阵是在复变函数中常常使用的一种工具,它可以帮助我们求解函数的部分分式展开。
通过计算函数的留数,并将它们按照一定的顺序排列成一个矩阵,我们可以确定部分分式展开的系数。
留数矩阵的方法可以帮助我们简化复杂的函数,并提高计算的效率。
传递函数矩阵
函数矩阵的定义是指数学中的一种概念,其指的是在一个二元变量的函数中,所有不
同的可能情况的函数的集合。
它可以通过构建一个表格表示。
在线性代数的范畴中,函数
矩阵也可以被认为是线性代数的核心概念。
它是解决一个方程或系统的一种方法,其中每
一行和每一列代表一个元素,并且每一个元素都对应一个未知数或变量。
举个例子,假设有以下函数矩阵:
\[F(x,y)=[xy+3,x^2-xy]\]
这意味着x和y是两个随机变量,它们可以以不同的形式出现,每个元素分别代表不
同类型的函数,即,首先是\[xy+3\],其次是\[x^2-xy\]。
一旦在函数矩阵中建立了这些元素,接下来的步骤就是对其进行求解和处理,以获取
正确的解决方案。
这可以通过求解函数矩阵的特征值和特征向量而实现,特征值可以定义
为所求矩阵X的特征值,而特征向量则是所求矩阵X与其特征值之间的乘积。
另一方面,函数矩阵也可以被用于计算函数的梯度,梯度也可以被定义为函数的导数,可以用来有效确定函数的变化情况,而函数矩阵可以反应函数在不同情况下的变化趋势。
总的来说,函数矩阵是一种快速有效的方法来求解一个二元变量的函数,而这样的函
数也是构建各种数学模型所必须的基础。
因此,正确理解和使用函数矩阵对于用户来说是
非常重要的。
传递函数矩阵基本关系式
函数矩阵是一种用于描述线性变换的矩阵形式。
在传递函数矩
阵的基本关系式中,我们需要考虑以下几个方面:
1. 线性变换,函数矩阵描述了一个线性变换,它将一个向量空
间中的向量映射到另一个向量空间中的向量。
线性变换具有保持向
量加法和标量乘法的性质。
2. 基向量的映射,函数矩阵的列向量表示了基向量在变换后的
映射结果。
通过函数矩阵乘以一个列向量,可以得到变换后的向量。
3. 基向量的线性组合,任意一个向量可以表示为基向量的线性
组合。
函数矩阵的作用是将基向量的线性组合映射为另一个向量空
间中的线性组合。
4. 矩阵乘法,函数矩阵的乘法运算可以用来表示多个线性变换
的复合。
通过将多个函数矩阵相乘,可以得到复合变换的函数矩阵。
5. 基变换,函数矩阵可以用来描述基向量的变换。
通过将函数
矩阵乘以一个基向量,可以得到基向量在变换后的映射结果。
综上所述,传递函数矩阵的基本关系式包括线性变换、基向量的映射、基向量的线性组合、矩阵乘法和基变换等方面。
这些关系式可以用函数矩阵的定义和性质来推导和解释。
传递函数矩阵模型
传递函数矩阵模型是一种用于描述系统运行规律的模型,它以矩
阵乘法的形式表示并可进行计算。
传递函数矩阵模型是由一个输入向
量和一个输出向量合成的矩阵所表示的,它通常用于描述复杂系统的
行为,以及提供有关系统的静态及动态特性的信息。
传递函数矩阵模型主要用于分析复杂系统的输入与输出的传递关系,能够模拟系统在固定的输入条件下对输出响应的规律,深入了解
系统运行状态和输出结果规律。
传递函数矩阵模型的矩阵表示法描述
的是复杂系统中输入到输出之间的传递过程,有利于深入了解系统内
部的工作原理及运行规律。
传递函数矩阵模型的主要特点是,可以根据经验获得系统的参数,从而进一步确定系统的运行规律并保证系统性能。
使用传递函数矩阵
模型还可以发现系统中所存在的算法等实际问题,从而更好的对复杂
系统的控制策略进行优化设计。
此外,传递函数矩阵模型可以用于分析系统的稳定性,确定各参
数的恒定性,以进一步确定系统的运行特性。
传递函数矩阵模型也可
以用于系统架构优化以及系统参数变更操作,以满足系统特定目标的
要求,如效率、精确度、低噪声等性能指标。
总的来说,传递函数矩阵模型是一种综合表示复杂系统特性的模型,可以用来定量分析系统参数的影响,以实现系统最优性能匹配,
进而达到提高工作效率的目的。
多输入多输出系统传递函数矩阵多输入多输出系统是指系统具有多个输入和多个输出的情况下,通过一组输入信号来激励系统,获得对应的输出信号。
在工程和科学领域中,多输入多输出系统被广泛应用于控制系统、通信系统、信号处理等领域。
在这篇文章中,我们将讨论多输入多输出系统的传递函数矩阵及其应用。
一、多输入多输出系统的传递函数矩阵是什么?传递函数是描述系统输入和输出之间关系的数学函数,多输入多输出系统的传递函数矩阵则是将多个输入和多个输出之间的关系表示为矩阵形式。
传递函数矩阵可以用于分析系统的稳定性、响应特性和频率特性等。
在传递函数矩阵中,矩阵的行数表示输出的个数,列数表示输入的个数,每个元素表示对应输入输出之间的传递函数。
二、多输入多输出系统的传递函数矩阵的表示方法传递函数矩阵可以通过多种方法表示,常见的有分块矩阵形式和行列式形式。
分块矩阵形式将传递函数矩阵按照输入和输出的关系进行分块,每个分块表示对应输入输出之间的传递函数。
行列式形式则将传递函数矩阵的每个元素表示为一个分式,分子和分母分别表示输入和输出之间的传递函数。
多输入多输出系统的传递函数矩阵在控制系统设计中起着重要的作用。
通过分析传递函数矩阵,可以得到系统的稳定性和响应特性,从而设计出合适的控制器来实现系统的控制目标。
传递函数矩阵还可以用于系统的频率特性分析,通过计算矩阵的特征值和特征向量可以得到系统的频率响应。
在通信系统中,多输入多输出系统的传递函数矩阵可以用于研究信道容量和信号传输性能。
通过分析传递函数矩阵,可以优化信道编码和调制方案,提高系统的传输效率和可靠性。
在信号处理领域,多输入多输出系统的传递函数矩阵可以用于信号的滤波和降噪。
通过设计传递函数矩阵,可以滤除信号中的噪声和干扰,提取出所需的信号信息。
多输入多输出系统的传递函数矩阵在工程和科学领域中具有广泛的应用。
通过分析传递函数矩阵,可以了解系统的稳定性、响应特性和频率特性等重要信息,从而实现系统的优化设计和性能提升。
矩阵传递函数矩阵传递函数是一种用于信号处理中的线性系统表示法。
矩阵传递函数是用矩阵表示系统输入和输出之间的关系,并且可以在频域中分析线性动态系统的性能特征。
在矩阵传递函数中,所有输入和输出都被表示为向量,而矩阵则表示系统响应。
矩阵传递函数在信号处理中的应用非常广泛,例如在控制理论中,可以使用矩阵传递函数设计控制系统的增益和稳定性,同时还可以在通信系统中进行频域分析和信号处理。
矩阵传递函数是将线性动态系统表示为矩阵的一种形式。
简单来说,矩阵传递函数是一个矩阵,将输入矩阵转换为输出矩阵。
这个矩阵被称为系统传递函数或系统矩阵。
系统矩阵通常用大写字母A表示。
如果输入信号为向量x,则输出信号为向量y,可以使用以下公式表示:y = A * x在这个公式中,矩阵A是系统的传递函数。
任何输入向量x通过矩阵A可以得到对应的输出向量y。
在矩阵传递函数中,输入信号可以如下表示:x = [x1, x2, ..., xn]'其中,单引号表示向量的转置。
输出信号可以表示为:在这个公式中,m和n分别是输出和输入信号矩阵的维数。
在实际应用中,系统可能具有多个输入和多个输出,因此需要使用多个输入向量和多个输出向量来表示输入和输出信号。
系统矩阵A的维数将随着输入和输出信号的数量而发生变化。
矩阵传递函数还可以用于分析线性动态系统的稳定性和频率响应。
在矩阵传递函数中,系统的增益和相位可以通过对传递函数进行频域分析来确定。
这种分析通常涉及将传递函数转换成频率域中的傅里叶变换,从而得到系统的频率响应特性。
总的来说,矩阵传递函数是一种非常有用的表示方式,可以用于描述许多不同类型的线性动态系统,并提供了一种可视化系统性能的方法。
在信号处理中,矩阵传递函数是一种非常常用的工具,可以通过它进行信号处理、控制系统设计等多个领域。
多输入多输出系统传递函数矩阵多输入多输出系统(MIMO系统)是指同时接收多个输入信号,同时输出多个反馈信号的系统。
MIMO系统是一类非常重要的实际工程系统,被广泛应用于通信、控制、信号处理等领域。
而传递函数矩阵是MIMO系统的一个重要工具,用于描述MIMO系统进出信号之间的关系,非常有利于对系统进行控制、优化和分析。
一、传递函数矩阵的定义和意义在MIMO系统中,输入信号和输出信号一般都是向量形式的,即:u(t)=[u1(t),u2(t),...,um(t)]Ty(t)=[y1(t),y2(t),...,yn(t)]T其中,u(t)是输入信号的向量,y(t)是输出信号的向量,m和n分别是输入信号的数目和输出信号的数目。
这时,我们可以使用传递函数矩阵来描述系统的动态响应:G(s)=[G11(s) G12(s) ... G1m(s) G21(s)G22(s) ... G2m(s) ... ... ... Gn1(s) Gn2(s) ... Gnm(s)]其中,Gij(s)表示第i个输出信号对第j个输入信号的响应函数。
可以看出,传递函数矩阵是一个n×m的矩阵,它描述了系统的m个输入信号对n个输出信号的影响。
传递函数矩阵的意义在于,它可以方便地描述系统进出信号之间的关系。
对于一个MIMO系统,可能存在多种输入和输出之间的相互作用关系,这时,传递函数矩阵提供了一种非常方便的方式来描述这些相互作用。
我们可以通过研究传递函数矩阵,了解系统输入信号和输出信号之间的相互影响,从而有效控制系统的响应性能。
二、传递函数矩阵的计算方法对于一个MIMO系统,其传递函数矩阵可以通过多种方式计算得到。
这里介绍两种比较常见的计算方法。
(一)矩阵分块法矩阵分块法是传递函数矩阵的一种常见计算方法。
对于一个MIMO系统,其状态方程可以表示为:dx(t)/dt=Ax(t)+Bu(t) y(t)=Cx(t)+Du(t)其中,x(t)是系统的状态变量,A、B、C、D分别是系统的状态方程矩阵和输出矩阵。