系统的传递函数矩阵为共48页
- 格式:ppt
- 大小:565.00 KB
- 文档页数:48
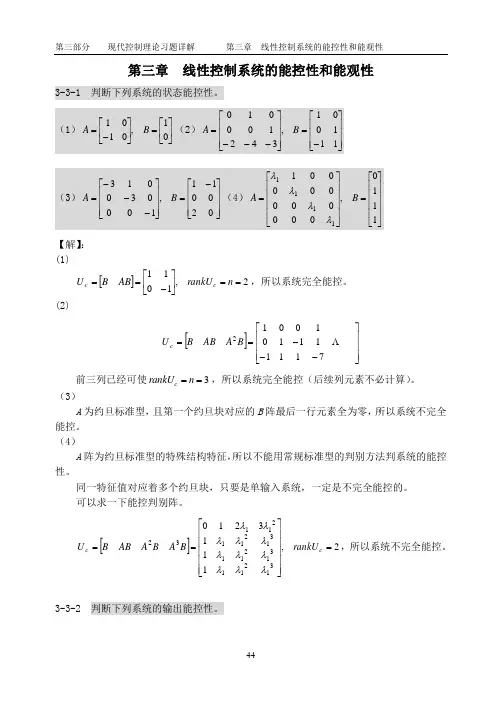
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
传递函数矩阵
函数矩阵的定义是指数学中的一种概念,其指的是在一个二元变量的函数中,所有不
同的可能情况的函数的集合。
它可以通过构建一个表格表示。
在线性代数的范畴中,函数
矩阵也可以被认为是线性代数的核心概念。
它是解决一个方程或系统的一种方法,其中每
一行和每一列代表一个元素,并且每一个元素都对应一个未知数或变量。
举个例子,假设有以下函数矩阵:
\[F(x,y)=[xy+3,x^2-xy]\]
这意味着x和y是两个随机变量,它们可以以不同的形式出现,每个元素分别代表不
同类型的函数,即,首先是\[xy+3\],其次是\[x^2-xy\]。
一旦在函数矩阵中建立了这些元素,接下来的步骤就是对其进行求解和处理,以获取
正确的解决方案。
这可以通过求解函数矩阵的特征值和特征向量而实现,特征值可以定义
为所求矩阵X的特征值,而特征向量则是所求矩阵X与其特征值之间的乘积。
另一方面,函数矩阵也可以被用于计算函数的梯度,梯度也可以被定义为函数的导数,可以用来有效确定函数的变化情况,而函数矩阵可以反应函数在不同情况下的变化趋势。
总的来说,函数矩阵是一种快速有效的方法来求解一个二元变量的函数,而这样的函
数也是构建各种数学模型所必须的基础。
因此,正确理解和使用函数矩阵对于用户来说是
非常重要的。
传递函数矩阵基本关系式
函数矩阵是一种用于描述线性变换的矩阵形式。
在传递函数矩
阵的基本关系式中,我们需要考虑以下几个方面:
1. 线性变换,函数矩阵描述了一个线性变换,它将一个向量空
间中的向量映射到另一个向量空间中的向量。
线性变换具有保持向
量加法和标量乘法的性质。
2. 基向量的映射,函数矩阵的列向量表示了基向量在变换后的
映射结果。
通过函数矩阵乘以一个列向量,可以得到变换后的向量。
3. 基向量的线性组合,任意一个向量可以表示为基向量的线性
组合。
函数矩阵的作用是将基向量的线性组合映射为另一个向量空
间中的线性组合。
4. 矩阵乘法,函数矩阵的乘法运算可以用来表示多个线性变换
的复合。
通过将多个函数矩阵相乘,可以得到复合变换的函数矩阵。
5. 基变换,函数矩阵可以用来描述基向量的变换。
通过将函数
矩阵乘以一个基向量,可以得到基向量在变换后的映射结果。
综上所述,传递函数矩阵的基本关系式包括线性变换、基向量的映射、基向量的线性组合、矩阵乘法和基变换等方面。
这些关系式可以用函数矩阵的定义和性质来推导和解释。
子系统串联后的传递函数矩阵传递函数矩阵(也称为系统矩阵)是指多个子系统串联后的总传递函数矩阵。
在控制系统中,传递函数矩阵是用于描述输入和输出之间关系的一个重要工具。
下面我们将详细介绍子系统串联后的传递函数矩阵,并给出一个使用示例。
在传递函数矩阵中,每个元素代表一个输入与一个输出之间的传递函数关系。
对于一个具有n个输入和m个输出的线性时不变系统,传递函数矩阵的大小为m×n。
传递函数矩阵的第i行第j列元素表示第i个输出对第j个输入的响应关系。
假设我们有两个子系统S1和S2,它们分别有两个输入和两个输出。
传递函数矩阵可以表示为:[G11G12][G21G22]其中G11、G12、G21和G22分别是子系统S1和S2的传递函数矩阵。
我们可以通过将两个子系统的传递函数矩阵相乘来得到它们串联后的总传递函数矩阵。
注意,子系统的顺序很重要,因为不同的顺序会导致不同的结果。
假设子系统S1的传递函数矩阵为:[G11G12][G21G22]子系统S2的传递函数矩阵为:[G33G34][G43G44]那么它们串联后的传递函数矩阵为:[G11G33+G12G43G11G34+G12G44][G21G33+G22G43G21G34+G22G44]接下来我们以一个实例来说明子系统串联后的传递函数矩阵的计算方法。
假设我们有两个子系统S1和S2,它们的传递函数分别为:S1的传递函数为:G1(s)=1/(s+1)S2的传递函数为:G2(s)=1/s我们将子系统串联起来,得到总系统传递函数G(s)。
首先,我们计算S1和S2的传递函数矩阵:G11=1/(s+1)G12=0G21=0G22=1/s然后,将它们相乘得到总传递函数矩阵:G(s)=G11*G22+G12*G21=1/(s+1)*1/s简化上式得到:G(s)=1/(s*(s+1))因此,总系统的传递函数为G(s)=1/(s*(s+1))。
总结起来,子系统串联后的传递函数矩阵可以通过将每个子系统的传递函数矩阵相乘来计算。
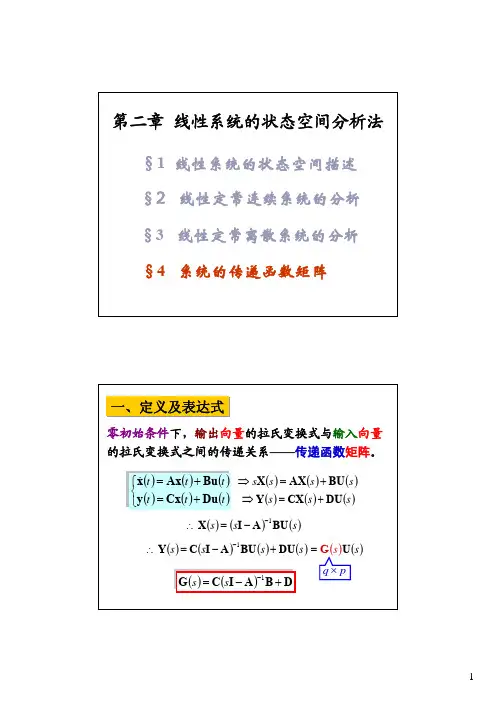
第二章 线性系统的状态空间分析法§1 线性系统的状态空间描述 §2 线性定常连续系统的分析 §3 线性定常离散系统的分析 §4 系统的传递函数矩阵一、定义及表达式零初始条件下,输出向量的拉氏变换式与输入向量 的拉氏变换式之间的传递关系——传递函数矩阵。
& ⎧ x(t ) = Ax(t ) + Bu(t ) ⇒ sX(s ) = AX(s ) + BU (s ) ⎨ ⎩y (t ) = Cx(t ) + Du(t ) ⇒ Y(s ) = CX(s ) + DU(s )∴ X(s ) = (sI − A ) BU (s )−1∴ Y(s ) = C(sI − A ) BU (s ) + DU(s ) = G (s )U(s )−1G (s ) = C(sI − A ) B + D−1q× p1⎡Y1 (s )⎤ ⎡G11 (s ) G12 (s ) L G1 p (s )⎤ ⎡U1 (s ) ⎤ ⎢Y (s )⎥ ⎢G (s ) G (s ) L G (s )⎥ ⎢U (s )⎥ 22 2p ⎢ 2 ⎥ = ⎢ 21 ⎥⎢ 2 ⎥ ⎢ M ⎥ ⎢ M M M ⎥⎢ M ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢Yq (s )⎥ ⎢Gq1 (s ) Gq 2 (s ) L Gqp (s )⎥ ⎢U p (s )⎥ ⎣ ⎦ ⎣ ⎦⎣ ⎦Y1 (s ) = G11 (s )U1 (s ) + G12 (s )U 2 (s ) + L + G1 j (s )U j (s ) + L + G1 p (s )U p (s )Yi (s ) = Gi1 (s )U1 (s ) + Gi 2 (s )U 2 (s ) + L + Gij (s )U j (s ) + L + Gip (s )U p (s )Yq (s ) = Gq1 (s )U1 (s ) + Gq 2 (s )U 2 (s ) + L + Gqj (s )U j (s ) + L + Gqp (s )U p (s )Gij (s ) =Yi (s ) , i = 1,2, L , q; j = 1,2 ,L ,p U j (s )第 j 个输入与第i 个输出之间的传递函数。

对偶系统的传递函数矩阵在系统理论中,传递函数是描述一个系统的变化相关关系的函数,它能描述一个系统的收敛性或稳定性。
传递函数矩阵是用来描述传递函数的矩阵形式,它把传递函数定义和表达为一个矩阵式。
对偶系统是一种把不同类型系统联系起来的系统结构,它可以有效地分析和推理一个复杂系统,而传递函数矩阵可以清晰表达复杂系统的特性,因此,传递函数矩阵在对偶系统中具有重要的应用价值。
传递函数矩阵在对偶系统中的应用主要有以下几点:(1)对偶系统的状态建模。
对偶系统的状态建模是通过传递函数矩阵来实现的,它可以使系统的特性得到清晰表达,并可以容易地控制系统。
(2)系统传输函数的分析。
用传递函数矩阵可以方便快速地推导出系统的传输函数,更加深入地分析系统的性能特征。
(3)系统的调节和控制。
通过传递函数矩阵,可以找到系统的鲁棒控制,进而实现系统的高效控制。
(4)系统的容错控制。
通过传递函数矩阵,可以更好地分析系统的容错性,从而实现系统的容错控制。
(5)系统的模型预测。
通过传递函数矩阵,可以有效地分析系统输入输出之间的关系,从而有效地提高系统的模型预测能力。
在当今的复杂系统工程研究中,传递函数矩阵在对偶系统中的应用十分重要,它不仅可以提高系统分析效率,而且可以更好地理解系统的内在规律。
通过传递函数矩阵可以精细描述系统,包括系统状态、控制、容错等,有利于提高系统设计和分析的水平。
同时,在系统工程实际应用中,传递函数矩阵也有许多局限。
例如,在很多情况下,传递函数模型可能不完善,也有可能由于不确定性因素会对传递函数的准确性造成影响。
另外,传递函数矩阵在求解上有一定的技术难度,需要系统设计者有足够的知识和能力才能够把握。
总之,传递函数矩阵在对偶系统中有重要的应用价值,可以有效地实现对偶系统的状态建模,系统传输函数的分析、系统的调节和控制、系统的容错控制以及系统的模型预测等。
但是,传递函数矩阵也有自己的局限性,因此,在应用传递函数矩阵时,系统设计者需要重视它的局限性,认真研究并不断改进传递函数矩阵,以保证它在对偶系统中的应用发挥出最大的优势。
多输入多输出系统传递函数矩阵
多输入多输出系统传递函数矩阵是指将一个多变量系统的所有输入和输出以矩阵形式表示的传递函数。
在控制系统设计中,我们经常会遇到多输入多输出系统的问题,因此需要有一种有效的方法来描述和分析这种系统。
对于一个n输入n输出的系统,传递函数矩阵H(s)可以表示为: H(s) = [H11(s) H12(s) ... H1n(s)]
[H21(s) H22(s) ... H2n(s)]
[... ... ... ]
[Hn1(s) Hn2(s) ... Hnn(s)]
其中,Hij(s)表示第i个输出对第j个输入的传递函数。
传递函数矩阵可以简化多输入多输出系统的分析和设计过程,使得我们可以更方便地进行控制器设计和系统优化。
同时,传递函数矩阵也可以用于描述多个子系统之间的相互作用,帮助我们更好地理解系统的整体行为。
在实际应用中,我们可以使用矩阵运算来计算传递函数矩阵,并根据需要对其进行简化或扩展。
通过对传递函数矩阵的分析,我们可以找到系统的稳定性、响应速度、误差等特性,从而选择合适的控制策略和参数来实现系统的控制和优化。
- 1 -。
传递函数是矩阵
传递函数是一个重要的概念,在控制系统中扮演着至关重要的角色。
它描述了输入和输出之间的关系,是描述系统行为的一种方式。
在很多情况下,传递函数可以被表示为矩阵的形式。
在控制系统中,传递函数是一个表示输入和输出之间关系的函数。
它通常用于描述线性时不变系统的动态响应。
传递函数可以被表示为一个分子多项式除以一个分母多项式的比率。
例如,传递函数可以表示为:
H(s) = Y(s) / X(s)
其中,Y(s) 是输出,X(s) 是输入,s 是复变量。
在许多情况下,传递函数可以被表示为矩阵的形式。
这种表示方式称为矩阵传递函数。
矩阵传递函数是一个矩阵,它描述了输入和输出之间的关系。
它可以被用于描述多输入多输出系统的动态响应。
例如,一个三输入三输出系统的传递函数可以表示为一个 $3 times
3$ 的矩阵:
H(s) = [H11(s) H12(s) H13(s); H21(s) H22(s) H23(s); H31(s) H32(s) H33(s)]
其中,每个元素都是一个传递函数。
矩阵传递函数的优势在于它可以被用于分析和设计多输入多输
出系统。
例如,可以使用矩阵传递函数来分析系统的稳定性、性能和鲁棒性。
此外,矩阵传递函数还可以被用于设计控制器,以优化系统的性能。
总之,传递函数是控制系统中的一个重要概念,它描述了输入和输出之间的关系。
在许多情况下,传递函数可以被表示为矩阵的形式,这种表示方式被称为矩阵传递函数。
矩阵传递函数可以被用于分析和设计多输入多输出系统,是控制系统工程师必须掌握的知识。

传递函数矩阵模型
传递函数矩阵模型是一种用于描述系统运行规律的模型,它以矩
阵乘法的形式表示并可进行计算。
传递函数矩阵模型是由一个输入向
量和一个输出向量合成的矩阵所表示的,它通常用于描述复杂系统的
行为,以及提供有关系统的静态及动态特性的信息。
传递函数矩阵模型主要用于分析复杂系统的输入与输出的传递关系,能够模拟系统在固定的输入条件下对输出响应的规律,深入了解
系统运行状态和输出结果规律。
传递函数矩阵模型的矩阵表示法描述
的是复杂系统中输入到输出之间的传递过程,有利于深入了解系统内
部的工作原理及运行规律。
传递函数矩阵模型的主要特点是,可以根据经验获得系统的参数,从而进一步确定系统的运行规律并保证系统性能。
使用传递函数矩阵
模型还可以发现系统中所存在的算法等实际问题,从而更好的对复杂
系统的控制策略进行优化设计。
此外,传递函数矩阵模型可以用于分析系统的稳定性,确定各参
数的恒定性,以进一步确定系统的运行特性。
传递函数矩阵模型也可
以用于系统架构优化以及系统参数变更操作,以满足系统特定目标的
要求,如效率、精确度、低噪声等性能指标。
总的来说,传递函数矩阵模型是一种综合表示复杂系统特性的模型,可以用来定量分析系统参数的影响,以实现系统最优性能匹配,
进而达到提高工作效率的目的。
子系统串联后的传递函数矩阵
随着系统复杂度的不断提高,子系统的设计和实现已经成为了很多工程领域的一个重要问题。
在多个子系统相互依赖的情况下,如何将它们串联起来并得到整个系统的传递函数矩阵成为了一个非常关键的问题。
传递函数是描述系统输入与输出之间关系的一种数学模型。
在多个子系统串联的情况下,我们可以先将每个子系统的传递函数表示出来,然后将它们按照串联的顺序组合起来,得到整个系统的传递函数矩阵。
具体来说,假设有n个子系统,其传递函数分别为G1(s),
G2(s),…,Gn(s),则整个系统的传递函数矩阵为:
G(s) = G1(s)G2(s)…Gn(s)
其中,G(s)是整个系统的传递函数矩阵,G1(s)、G2(s)、…、Gn(s)分别是每个子系统的传递函数。
在实际应用中,子系统之间的串联可能不是简单的串联,还可能涉及到反馈等复杂结构。
此时,我们需要利用控制理论的相关知识进行分析和设计,以得到最优的系统性能。
总之,子系统串联后的传递函数矩阵是一个非常重要的概念,在系统设计和控制理论等领域都有广泛的应用。
它不仅可以帮助我们理解系统的行为,还可以指导我们进行系统的优化和改进。
- 1 -。