信息光学第二章
- 格式:pptx
- 大小:1.64 MB
- 文档页数:81
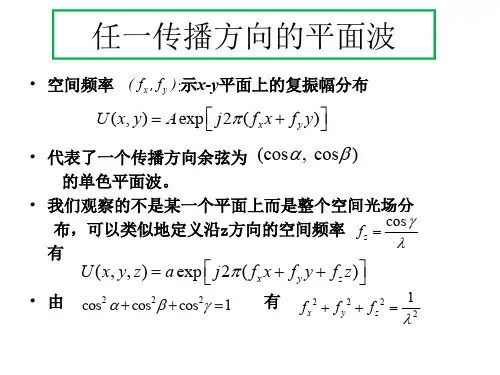
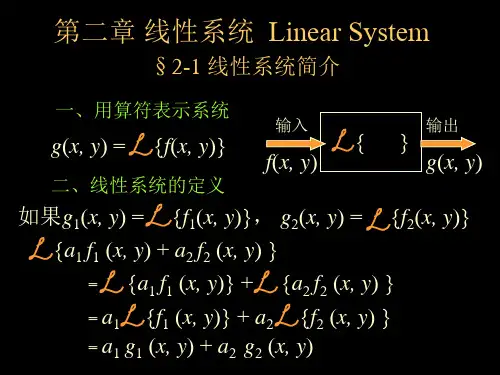
光信息处理(信息光学)复习提纲第一章线性系统分析1.空间频率的定义是什么?如何理解空间频率的标量性和矢量性?2.空间频率分量的定义及表达式?3.平面波的表达式和球面波的表达式?4.相干照明下物函数复振幅的表示式及物理意义?5.非相干照明下物光强分布的表示式及物理意义?6.线性系统的定义7.线性系统的脉冲响应的表示式及其作用8.何谓线性不变系统9.卷积的物理意义10.线性不变系统的传递函数及其意义11.线性不变系统的本征函数第二章标量衍射理论1.衍射的定义2.惠更斯-菲涅耳原理3.衍射的基尔霍夫公式及其线性表示4.菲涅耳衍射公式及其近似条件5.菲涅耳衍射与傅立叶变换的关系6.会聚球面波照明下的菲涅耳衍射7.夫琅和费衍射公式8.夫琅和费衍射的条件及范围9.夫琅和费衍射与傅立叶变换的关系10.矩形孔的夫琅和费衍射11.圆孔的夫琅和费衍射(贝塞尔函数的计算方面不做要求)12.透镜的位相变换函数13.透镜焦距的判别14.物体位于透镜各个部位的变换作用15.几种典型的傅立叶变换光路第三章光学成象系统的传递函数1.透镜的脉冲响应2.相干传递函数与光瞳函数的关系3.会求几种光瞳的截止频率4.强度脉冲响应的定义5.非相干照明系统的物象关系6.光学传递函数的公式及求解方法7.会求几种情况的光学传递函数及截止频率第五章光学全息1.试列出全息照相与普通照相的区别2.简述全息照相的基本原理3.试画出拍摄三维全息的光路图4.基元全息图的分类5.结合试验谈谈做全息实验应注意什么(没做过实验,只谈一些理论性的注意方面)6.全息照相为什么要防震,有那些防震措施,其依据是什么7.如何检测全息系统是否合格8.全息照相的基本公式9.全息中的物像公式及解题(重点)复 习第一章 线性系统分析1.空间频率的定义是什么?如何理解空间频率的标量性和矢量性?时间量 空间量22v T πωπ==22K f ππλ== 时间角频率 空间角频率其中:v ----时间频率 其中:f ---空间频率T----时间周期 λ-----空间周期 物理意义:由图1.7.3知:(设光在z x ,平面内传播,0=y )cos xd λα=, 又 ∵ 1x xf d =联立得:cos x f αλ=讨论:① 当090,,<γβα时0,,>z y x f f f ,表示k沿正方向传播;②标量性,当α↗时,αcos ↘→x f ↘→x d ↗当α↘时,αcos ↗→x f ↗→x d ↘ ③标量性与矢量性的联系条纹密x d ↘→x f ↗→α↘→θ↗x x f d 1=λαcos =x f 条纹疏x d ↗→x f ↘→α↗→θ↘2.空间频率分量的定义及表达式?{}γβαcos ,cos ,cos k k ={}z y x r ,,=)cos cos cos (γβαz y x k r k ++=⋅代入复振幅表达式:()()()[]γβαμcos cos cos ex p ,,,,0z y x jk z y x z y x U ++=()⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛++=z y x j z y x λγλβλαπμcos cos cos 2exp ,,0 ()()[]z f y f x f j z y x z y ++=λπμ2ex p ,,0式中:λαcos =x f ,λβcos =yf ,λγcos =z f3.平面波的表达式和球面波的表达式?平面波()⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛++=z y x j z y x U λγλβλαπμcos cos cos 2exp ,,0 ()()[]z f y f x f j z y x U z y x ++=πμ2ex p ,,0球面波()1,,jkr a U x y z e γ=()21212212121221⎪⎪⎭⎫ ⎝⎛++=++=z y x z z y x r近轴时()1,,U x y z ⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫⎝⎛++=1221021exp z y x jkz r a()⎪⎪⎭⎫ ⎝⎛+⋅≈1221102exp exp z y x jkjkz z a ⎪⎪⎭⎫ ⎝⎛+=12202exp z y x jkU若球面波中心不在坐标原点,上式改为:()1,,U x y z ()()⎥⎥⎦⎤⎢⎢⎣⎡++-=1202002exp z y y x x jk U4.相干照明下物函数复振幅的表示式及物理意义?设()y x f ,为一物函数的复振幅,其傅氏变换对为 ()()(),exp 2x y x y F f f f x y j f x f y dxdyπ∞-∞⎡⎤=-+⎣⎦⎰⎰ ()()(),exp 2x yxyxyf x y F f f j f x f y df dfπ∞-∞⎡⎤=+⎣⎦⎰⎰可见:物函数()y x f ,可以看作由无数振幅不同()x y x y F f f df df 方向不同()cos ,cos xyf f αλβλ==的平面波相干迭加而成。
目录第一章信息光学的数学基础1.1 光学中常用的非初等函数 (1)1.1.1 矩形函数 (1)1.1.2 阶跃函数 (5)1.1.3 符号函数 (8)1.1.4 三角形函数 (10)1.1.5 斜坡函数 (13)1.1.6 圆域函数 (14)1.1.7 非初等函数的运算和复合 (15)1.2 光学中常用的初等函数 (17)1.2.1 sinc 函数 (17)1.2.2 高斯函数 (19)1.2.3 贝塞尔函数 (24)1.2.4 宽边帽函数 (27)1.3 函数的变换 (28)1.3.1 一维函数的变换 (28)1.3.2 可分离变量的二维函数的特性 (31)1.3.3 几何变换 (33)1.4 δ函数和梳状函数 (38)1.4.1 广义函数的含义 (38)1.4.2 δ函数的定义 (40)1.4.3 δ函数的性质 (49)1.4.4 δ函数的导数 (54)1.4.5 复合δ函数 (56)1.4.6 用δ函数描述光学过程的一个例子 (57)1.4.7 梳状函数 (59)1.5 周期函数 (64)1.5.1 周期函数的含义 (64)1.5.2 正弦函数 (66)1.5.3 周期脉冲序列 (67)1.6 离散函数 (70)1.6.1 单位脉冲序列 (70)1.6.2 单位阶跃序列 (72)1.6.3 矩形序列 (73)1.6.4 正弦型序列 (74)1.6.5 斜变序列 (75)1.6.6 实指数序列 (76)1.6.7 复指数序列 (76)1.6.8 随机序列 (77)1.7 复值函数 (77)1.7.1 复数 (77)1.7.2 复值函数 (79)1.7.3 几个常数的关系式和恒等式 (82)习题 1 (83)第二章傅里叶变换和系统的频域分析2.1 一维函数的傅里叶变换 (86)2.1.1 傅里叶级数 (86)2.1.2 傅里叶积分定理 (96)2.1.3 傅里叶变换 (97)2.1.4 极限情况下的傅里叶变换 (104)2.1.5 δ函数的傅里叶变换 (105)2.1.6 常用一维函数傅里叶变换对 (114)2.2 二维函数的傅里叶变换 (116)2.2.1 二维函数傅里叶变换的定义 (116)2.2.2 极坐标系中的二维傅里叶变换 (118)2.2.3 常用二维函数傅里叶变换对 (121)2.3 傅里叶变换的性质 (121)2.3.1 傅里叶变换的基本性质 (121)2.3.2 虚、实、奇和偶函数的傅里叶变换 (124)2.4 傅里叶变换的MATLAB 实现 (126)2.4.1 符号傅里叶变换 (126)2.4.2 离散傅立叶变换 (127)2.4.3 快速傅里叶变换 (130)2.5 卷积和卷积定理 (137)2.5.1 卷积的定义 (137)2.5.2 卷积的计算 (138)2.5.3 函数f (x, y)与δ函数的卷积 (148)2.5.4 卷积的效应 (150)2.5.5 卷积运算的基本性质 (152)2.5.6 卷积的MATLAB 实现 (154)2.6 相关和相关定理 (157)2.6.1 互相关 (157)2.6.2 自相关 (159)2.6.3 归一化互相关函数和自相关函数 (161)2.6.4 有限功率函数的相关 (162)2.6.5 相关的计算方法 (162)2.6.6 相关的MATLAB 实现 (167)2.7 傅里叶变换的基本定理 (170)2.7.1 卷积定理 (170)2.7.2 互相关定理 (171)2.7.3 互相关定理 (173)2.7.4 自相关定理 (174)2.7.5 巴塞伐定理 (174)2.7.6 广义巴塞伐定理 (175)2.7.7 导数定理或微分变换定理 (differential transform theorem) 1752.7.8 积分变换定理 (176)2.7.9 转动定理 (176)2.7.10 矩定理 (176)习题2 (178)第三章线性系统和光场的傅里叶分析3.1 线性系统的概念 (180)3.1.1 信号和信息 (180)3.1.2 系统的概念 (180)3.1.3 线性系统 (182)3.1.4 线性平移不变系统 (183)3.2 线性系统的分析方法 (184)3.2.1 正交函数系 (184)3.2.2 基元函数的响应 (188)3.2.3 线性平移不变系统的传递函数 (193)3.2.4 线性平移不变系统的传递函数 (195)3.3 光场解析信号表示 (199)3.3.1 单色光场的数学形式和复数表示 (199)3.3.2 准单色光场的复数表示 (201)3.3.3 多色光场的复数表示 (203)3.4 光场的复振幅空间描述 (206)3.4.1 球面波的复振幅 (206)3.4.2 球面波的近轴近似 (207)3.4.3 平面波的复振幅 (212)3.5 二维光场的傅里叶分析 (216)3.5.1 平面波的空间频率 (216)3.5.2 球面波的空间频率 (222)3.5.3 复振幅分布的空间频谱和角谱 (222)3.5.4 局域空间频率 (224)3.5.5 复杂光波的分解 (225)3.6 函数抽样与函数复原 (228)3.6.1 一维抽样定理 (228)3.6.3 空间-带宽积 (239)3.6.4 线性光学系统的分辨率 (242)习题3 (242)第四章标量衍射理论 (248)4.1 从矢量电场到标量电场 (251)4.1.1 波动方程 (251)4.1.2 亥姆霍兹方程 (253)4.2 基尔霍夫衍射理论 (254)4.2.1 惠更斯-菲涅耳原理 (254)4.2.2 格林定理 (256)4.2.3 基尔霍夫积分定理 (257)4.2.4 基尔霍夫衍射公式 (260)4.2.5 菲涅耳-基尔霍夫衍射公式 (263)4.2.6 球面波的衍射理论 (265)4.3 衍射在空间频域的描述 (268)4.3.1 从空间域到空间频域 (268)4.3.2 谱频的传播效应 (269)4.3.3 角谱的传播 (272)4.3.4 孔径对角谱的效应 (273)4.3.5 传播现象作为一种线性空间滤波器 (276)4.4 衍射的菲涅耳近似和夫琅禾费近似 (277)4.4.1 菲涅耳近似 (277)4.4.2 夫琅禾费近似 (280)4.4.3 夫琅禾费衍射与菲涅耳衍射的关系 (280)4.4.4 衍射屏被会聚球面波照射时的菲涅耳衍射 (281)4.4.5 衍射的巴俾涅原理 (283)4.5 菲涅耳衍射的计算 (285)4.5.1 周期性物体的菲涅耳衍射 (285)4.5.2 矩形孔的菲涅耳衍射 (291)4.5.3 特殊矩形孔的菲涅耳衍射 (300)4.5.4 圆孔的菲涅耳衍射 (303)4.6 夫琅禾费衍射的计算 (306)4.6.1 矩形孔和狭缝 (307)4.6.3 衍射光栅 (313)4.6.4 圆形孔径 (324)习题 4 (329)第五章光学成像系统的空域描述及傅里叶分析 (336)5.1 成像系统和透镜的结构及变换作用 (336)5.1.2 透镜的结构及变换作用 (337)5.2 透镜作为相位变换器 (341)5.2.1 薄透镜的厚度函数 (341)5.2.2 薄透镜的相位变换及其物理意义 (343)5.3 透镜的傅里叶变换性质 (345)5.3.1 透镜的一般变换特性 (345)5.3.2 物在透镜之前 (349)5.3.3 物在透镜后方 (353)5.4 透镜的空间滤波特性 (355)5.4.1 透镜的截止频率、空间带宽积和视场 (356)5.4.2 透镜孔径引起的渐晕效应 (359)5.5 光学系统的一般模型 (363)5.5.1 光阑 (363)5.5.2 入射光瞳和出射光瞳 (366)5.5.3 黑箱模型 (368)5.6 衍射受限光学系统成像的空域分析 (370)5.6.1 衍射受限系统的点扩散函数及成像 (370)5.6.2 正薄透镜的点扩散函数 (374)5.6.3 相干照射下衍射受限系统的成像规律 (375)5.6.4 成像系统的线性特性 (377)习题 5 (378)第六章光学成像系统的频谱分析和传递函数 (384)6.1 光成像系统像质评价概述 (384)6.1.1 星点检验法 (385)6.1.2 图像分辨率板法 (388)6.2 光学传递函数的基本概念 (394)6.2.1 以点扩散函数为基础的定义 (397)6.2.2 以正弦光栅成像为基础的定义 (401)6.2.3 以光瞳函数表示的光学传递函数 (404)6.2.4 组合成像系统的光学传递函数 (405)6.3 衍射受限相干成像系统的相干传递函数 (406)6.3.1 相干传递函数 (406)6.3.2 相干传递函数的角谱解释 (415)6.4 衍射受限系统非相干成像的频域分析—非相干传递函数 (416)6.4.1 非相干成像系统的光学传递函数(OTF) (417)6.4.2 OTF 和CTF 的关系 (421)6.4.3 衍射受限的OTF (421)6.4.4 有像差系统的传递函数 (426)6.5 线扩散函数和刃边扩散函数 (429)6.5.1 线扩散函数和刃边扩散函数的概念 (429)6.5.2 相干线扩散函数和相干刃边扩散函数 (431)6.5.3 非相干线扩散函数和刃边扩散函数 (433)6.6 相干与非相干成像系统的比较 (434)6.7 光学传递函数的测量 (436)6.7.1 光学传递函数测量装置 (436)6.7.2 光学传递函数测量步骤 (439)6.7.3 光学传递函数测量准确度 (440)6.7.4 光学传递函数的测量环境 (445)6.7.5 光学传递函数的测量数据的修正和表示 (447)6.7.6 光学传递函数的测量方法 (448)6.7.7 光学传递测量装置的检定 (450)6.7.8 光学传递标准装置 (450)6.7.9 离散采样系统光学传递测量 (451)习题 6 (452)第七章部分相干理论 (457)7.1 光的干涉理论 (457)7.1.1 叠加原理 (458)7.1.2 光波的干涉 (458)7.1.3 相干和非相干叠加 (460)7.1.4 干涉条纹的可见度 (462)7.2 互相干函数和相干度 (463)7.2.1 互相干函数的定义 (464)7.2.2 杨氏干涉条纹的几何结构 (468)7.2.3 互相干函数的谱表示 (470)7.3 时间相干性和相干时间 (471)7.3.1 时间相干性 (471)7.3.2 相干时间的定义 (476)7.3.3 傅里叶变换光谱技术 (477)7.4 空间相干性 (479)7.5 准单色条件下的干涉和互强度 (480)7.6 范西泰特-策尼克定理 (483)7.6.1 范西泰特-策尼克定理 (484)7.6.2 相干面积 (486)7.6.3 均匀圆形光源 (486)7.7 互相干函数的传播和广义惠更斯原理 (488)习题 7 (491)第八章光学全息 (496)8.1 光学全息概述 (496)8.1.1 全息术的发展简史 (496)8.1.2 全息照相的基本特点 (498)8.1.3 全息图的类型 (500)8.2 全息照相的基本原理 (501)8.2.1 全息照相的基本过程 (501)8.2.2 波前记录 (502)8.2.3 记录过程的线性条件 (503)8.2.4 波前再现 (504)8.3 同轴全息图和离轴全息图 (507)8.3.1 同轴全息图 (507)8.3.2 离轴全息图 (510)8.4 基元全息图 (514)8.4.1 基元全息图 (514)8.4.2 基元光栅 (515)8.5 菲涅耳全息图 (517)8.5.1 点源全息图和基元波带片 (517)8.5.2 几种特殊情况的讨论 (521)8.6 像全息图 (524)8.6.1 再现光源宽度的影响 (524)8.6.2 再现光源光谱宽度的影响 (525)8.6.3 色模糊 (527)8.6.4 像全息图的制作 (528)8.7 傅里叶变换全息图 (529)8.7.1 傅里叶变换全息图的原理 (530)8.7.2 准傅里叶变换全息图 (532)8.7.3 无透镜傅里叶变换全息图 (533)8.8 彩虹全息 (535)8.8.1 二步彩虹全息 (535)8.8.2 一步彩虹全息 (536)8.8.3 彩虹全息的色模糊 (537)8.9 相位全息图 (540)8.10 模压全息图 (541)8.10.1 模压全息图的制作 (542)8.10.2 全息烫印箔 (542)8.10.3 动态点阵全息图 (543)8.11 体积全息 (543)8.11.1 透射体积全息图 (544)8.11.2 反射全息图 (546)8.12 平面全息图的衍射效率 (546)8.12.1 振幅全息图的衍射效率 (547)8.12.2 相位全息图的衍射效率 (548)8.13 全息记录介质 (549)8.13.1 基本术语 (549)8.13.2 E-D曲线和特性曲线 (551)V8.13.3 全息记录介质的分类 (554)习题 8 (558)第九章光学信息处理技术 (562)9.1 引言 (562)9.2 早期研究成果 (563)9.2.1 阿贝成像理论 (563)9.2.2 阿贝-波特(Abbe-Porter)实验 (564)9.2.3 泽尼克相衬显微镜 (568)9.2.4 改善的照片质量 (570)9.3 空间频率滤波系统 (571)9.3.1 空间滤波系统 (571)9.3.2 空间滤波的傅里叶分析 (572)9.3.3 滤波器的种类及应用举例 (576)9.4 相干光学信息处理 (580)9.4.1 相干光学信息处理系统 (580)9.4.2 多重像的产生 (581)9.4.3 图像的相加和相减 (581)9.4.4 光学微分—像边缘增强 (584)9.4.5 综合孔径雷达 (586)9.5 非相干光学信息处理 (588)9.5.1 相干光与非相干光处理的比较 (588)9.5.2 非相干空间滤波 (589)9.5.3 基于几何光学的非相干处理 (593)9.6 白光信息处理 (594)9.7 光计算 (595)9.7.1 光学矩阵运算 (596)9.7.2 光学互连 (597)9.7.3 光学神经网络 (598)习题 9 (598)。