第八章光栅传感器与应用8-1
- 格式:ppt
- 大小:4.15 MB
- 文档页数:58

光纤光栅传感器原理及应用(武汉理工大学)1光纤光栅传感原理光纤光栅就是利用紫外光曝光技术,在光纤中产生折射率的周期分布,这种光纤内部折射率分布的周期性结构就是光纤光栅。
光纤布喇格光栅(Fiber Bragg grating ,FBG )在目前的应用和研究中最为广泛。
光纤布喇格光栅,周期0.1微米数量级。
FBG 是通过改变光纤芯区折射率,周期的折射率扰动仅会对很窄的一小段光谱产生影响,因此,如果宽带光波在光栅中传输时,入射光将在相应的波长上被反射回来,其余的透射光则不受影响,这样光纤光栅就起到了波长选择的作用,如图1。
图1 FBG 结构及其波长选择原理图在外力作用下,光弹效应导致折射率变化,形变则使光栅常数发生变化;温度变化时,热光效应导致折射率变化,而热膨胀系数则使光栅常数发生变化。
(1)光纤光栅应变传感原理光纤光栅反射光中心波长的变化反映了外界被测信号的变化情况,在外力作用下,光弹效应导致光纤光栅折射率变化,形变则使光栅栅格发生变化,同时弹光效应还使得介质折射率发生改变,光纤光栅波长为1300nm ,则每个με将导致1.01pm 的波长改变量。
(2)光纤光栅温度传感原理光温度变化时,热光效应导致光纤光栅折射率变化,而热膨胀系数则使光栅栅格发生变化。
光纤光栅中心波长为1300nm ,当温度变化1摄氏度时,波长改变量为9.1pm 。
反射光谱入射光谱投射光谱入射光反射光投射光包层纤芯光栅光栅周期2光纤光栅传感器特点利用光敏元件或材料,将被测参量转换为相应光信号的新一代传感技术,最大特点就是一根光纤上能够刻多个光纤光栅,如图2所示。
光纤光栅传感器可测物理量:温度、应力/应变、压力、流量、位移等。
图2 光纤光栅传感器分布式测量原理光纤光栅的特点: ● 本质安全,抗电磁干扰● 一纤多点(20-30个点),动态多场:分布式、组网测量、远程监测 ● 尺寸小、重量轻; ● 寿命长: 寿命 20 年以上3目前我校已经开展的工作(部分)3.1 基于光纤光栅传感的旋转传动机械动态实时在线监测技术与系统利用光纤光栅传感技术的特性,实现转子运行状态的非接触直接测量。

光栅传感器的工作原理和应用工作原理光栅传感器是一种利用光栅原理进行测量的传感器。
它通过测量光线通过光栅时的衍射或干涉效应来获取目标物体的信息。
光栅传感器通常由光源、光栅、检测器和信号处理器等组成。
光源光源是光栅传感器的关键组成部分,它会产生一束光线。
常用的光源包括激光器、LED等。
光源发出的光线会经过光栅的作用。
光栅光栅是光栅传感器的核心部件,它是由一定规律排列的透明或不透明条纹组成的。
光线经过光栅时,会发生衍射或干涉现象,这种现象可以被用来实现测量。
检测器检测器是用来捕捉经过光栅后的光线并将其转化为电信号的部件。
常用的检测器包括光电二极管、光敏电阻等。
检测器会将光线的强度、波长等信息转化为电信号。
信号处理器信号处理器用于分析和处理检测器输出的电信号。
它可以对信号进行放大、滤波、数学运算等操作,最终得到目标物体的相关信息。
信号处理器可以是专用的芯片,也可以是嵌入式系统或计算机。
应用光栅传感器具有很广泛的应用领域,以下列举了几个常见的应用场景:1.位移测量:光栅传感器可以用来测量物体的位移,例如工件的位置、机械零件的运动距离等。
通过测量光栅的衍射或干涉效应,可以得到目标物体的位移信息。
2.角度测量:光栅传感器可以用来测量物体的旋转角度,例如地平仪、陀螺仪等。
通过测量光栅的衍射或干涉效应,可以得到目标物体的角度信息。
3.表面形貌测量:光栅传感器可以用来测量物体的表面形貌,例如薄膜的厚度、曲率等。
通过测量光栅的衍射或干涉效应,可以得到目标物体表面的形貌信息。
4.速度测量:光栅传感器可以用来测量物体的速度,例如车辆的速度、机械零件的转速等。
通过测量光栅的衍射或干涉效应,可以得到目标物体的速度信息。
5.压力测量:光栅传感器可以用来测量物体的压力,例如材料的拉伸、压缩等。
通过测量光栅的衍射或干涉效应,可以得到目标物体的压力信息。
以上仅是光栅传感器的一些常见应用场景,实际上光栅传感器的应用还可以延伸到更多领域。
绪论一、传感器:将各种非电量(包括物理量、化学量、生物量等),按照一定的规律转换成便于处理和传输的另一种物理量(一般为电量)的装置。
二、传感技术:是利用各种功能材料实现信息检测的一门应用技术,是检测(传感)原理、材料科学、工艺加工等三要素的最佳结合。
三、传感器的组成:传感器一般有敏感元件、转换原件和测量电路三部分组成,有事还需要加辅助电源。
四、传感器分类:1.按输入量分类如输入量分别为温度、压力、位移、速度、加速度、湿度等非电量时,则相应的传感器称为温度传感器、压力传感器、位移传感器、速度传感器、加速度传感器、湿度传感器等。
2.按测量原理分类现有传感器的测量原理主要是基于电磁原理和固体物理学理论。
如根据变电阻的原理,相应的有电位器式、应变式传感器;根据变磁阻的原理,相应的有电感式、差动变压器式、电涡流式传感器;根据半导体有关理论,则相应的有半导体力敏、热敏、光敏、气敏等固态传感器。
3.按结构型和物性型分类所谓结构型传感器,主要是通过机械结构的几何形状或尺寸的变化,将外界被测参数转换成相应的电阻、电感、电容等物理量的变化,从而检测出被测信号,这种传感器目前应用的最为普遍。
物性型传感器则是利用某些材料本身物理性质的变化而实现测量,它是以半导体、电介质、铁电体等作为敏感材料的固态器件。
五、传感器的发展趋向1.传感器的固态化,2、传感器的集成化和多功能化3.传感器的图像化4.传感器的智能化第1章传感器的一般特性§1-1 传感器的静态特性传感器在被测量的各个值处于稳定状态时,输出量和输入量之间的关系称为静态特性。
传感器静态特性的主要指标有以下几点:一、线性度(非线性误差)在规定条件下,传感器校准曲线与拟合直线间最大偏差与满量程(F·S)输出值的百分比称为线性度。
二、灵敏度传感器的灵敏度指到达稳定工作状态时输出变化量与引起此变化的输入变化量之比。
线性传感器校准曲线的斜率就是静态灵敏度K。
《传感器原理及工程应用》完整版习题答案第1章 传感与检测技术的理论基础(P26)1—1:测量的定义?答:测量是以确定被测量的值或获取测量结果为目的的一系列操作。
所以, 测量也就是将被测量与同种性质的标准量进行比较, 确定被测量对标准量的倍数。
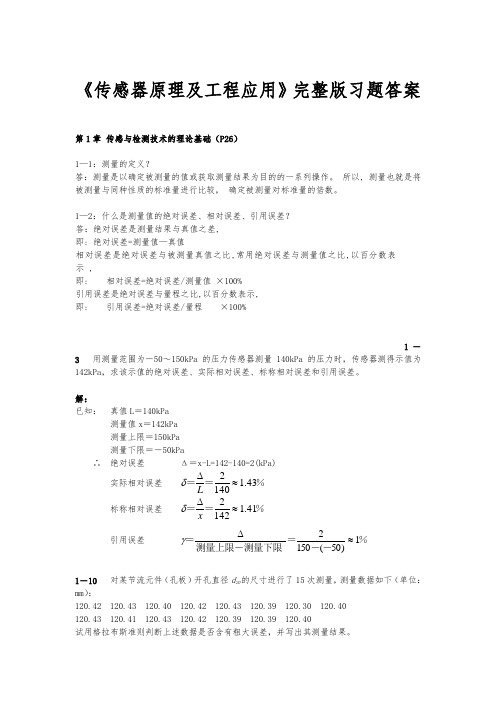
1—2:什么是测量值的绝对误差、相对误差、引用误差?1-3 用测量范围为-50~150kPa 的压力传感器测量140kPa 的压力时,传感器测得示值为142kPa ,求该示值的绝对误差、实际相对误差、标称相对误差和引用误差。
解:已知: 真值L =140kPa 测量值x =142kPa 测量上限=150kPa 测量下限=-50kPa∴ 绝对误差 Δ=x-L=142-140=2(kPa)实际相对误差 %==43.11402≈∆L δ标称相对误差%==41.11422≈∆x δ引用误差%--=测量上限-测量下限=1)50(1502≈∆γ1-10 对某节流元件(孔板)开孔直径d 20的尺寸进行了15次测量,测量数据如下(单位:mm ):120.42 120.43 120.40 120.42 120.43 120.39 120.30 120.40 120.43 120.41 120.43 120.42 120.39 120.39 120.40试用格拉布斯准则判断上述数据是否含有粗大误差,并写出其测量结果。
答:绝对误差是测量结果与真值之差, 即: 绝对误差=测量值—真值 相对误差是绝对误差与被测量真值之比,常用绝对误差与测量值之比,以百分数表示 , 即: 相对误差=绝对误差/测量值 ×100% 引用误差是绝对误差与量程之比,以百分数表示, 即: 引用误差=绝对误差/量程 ×100%解:当n =15时,若取置信概率P =0.95,查表可得格拉布斯系数G =2.41。
则 2072.410.03270.0788()0.104d G mm v σ=⨯=<=-,所以7d 为粗大误差数据,应当剔除。


《第一章传感器的一般特性》1试绘制转速和输出电压的关系曲线,并确定:1)该测速发电机的灵敏度。
2)该测速发电机的线性度。
2.已知一热电偶的时间常数τ=10s,若用它来测量一台炉子的温度,炉内温度在540οC和500οC 之间按近似正弦曲线波动,周期为80s,静态灵敏度k=1,试求该热电偶输出的最大值和最小值,以及输入与输出信号之间的相位差和滞后时间。
3.用一只时间常数为0.355s 的一阶传感器去测量周期分别为1s、2s和3s的正弦信号,问幅值误差为多少?4.若用一阶传感器作100Hz正弦信号的测试,如幅值误差要求限制在5%以内,则时间常数应取多少?若在该时间常数下,同一传感器作50Hz正弦信号的测试,这时的幅值误差和相角有多大?5.已知某二阶系统传感器的固有频率f0=10kHz,阻尼比ξ=0.1,若要求传感器的输出幅值误差小于3%,试确定该传感器的工作频率范围。
6.某压力传感器属于二阶系统,其固有频率为1000Hz,阻尼比为临界值的50%,当500Hz的简谐压力输入后,试求其幅值误差和相位滞后。
《第二章应变式传感器》1.假设某电阻应变计在输入应变为5000με时电阻变化为1%,试确定该应变计的灵敏系数。
又若在使用该应变计的过程中,采用的灵敏系数为 1.9,试确定由此而产生的测量误差的正负和大小。
2.如下图所示的系统中:①当F=0和热源移开时,R l=R2=R3=R4,及U0=0;②各应变片的灵敏系数皆为+2.0,且其电阻温度系数为正值;③梁的弹性模量随温度增加而减小;④应变片的热膨胀系数比梁的大;⑤假定应变片的温度和紧接在它下面的梁的温度一样。
在时间t=0时,在梁的自由端加上一向上的力,然后维持不变,在振荡消失之后,在一稍后的时间t1打开辐射源,然后就一直开着,试简要绘出U0和t的关系曲线的一般形状,并通过仔细推理说明你给出这种曲线形状的理由。
3.一材料为钢的实心圆柱形试件,直径d=10 mm,材料的弹性模量E=2 ×1011N/m2,泊松比μ=0.285,试件上贴有一片金属电阻应变片,其主轴线与试件加工方向垂直,如图1所示,若已知应变片的轴向灵敏度k x =2,横向灵敏度C=4%,当试件受到压缩力F=3×104N作用时。
由于光栅传感器测量精度高、动态测量范围广、可进行无接触测量、易实现系统的自动化和数字化,因而在机械工业中得到了广泛的应用。
特别是在量具、数控机床的闭环反馈控制、工作母机的坐标测量等方面,光栅传感器都起着重要作用。
光栅传感器通常作为测量元件应用于机床定位、长度和角度的计量仪器中,并用于测量速度、加速度、振动等如图5.33所示为光栅式万能测长仪的工作原理图。
主光栅采用透射式黑白振幅光栅,光栅栅距W=0.01μm,指示光栅采用四裂相光栅,照明光源采用红外发光二极管TIL-23,其发光光谱为930nm~l000nm,接收用LS600光电三极管,两光栅之间的间隙为0.02nm~0.035mm,由于主光栅和指示光栅之间的透光和遮光效应,形成莫尔条纹,当两块光栅相对移动时,便可接收到周期性变化的光通量。
利用四裂相指示光栅依次获得sin cos-sin-cos的需要。
图5.33 光栅式万能测长仪的工作原理图由光栅传感器获得的四路原始信号,经差分放大器放大、移相电路分相、整形电路整形、倍频电路细分、辨向电路辨向进入可逆计数器计数,由显示器显示读出。
这是光栅式万能测长仪从光栅传感器输出信号后读出的整个逻辑,每步逻辑由相应的电路来完成,通常采用大规模集成电路来实现以上功能。
随着微机技术的不断发展,目前人们已研制出带微机的光栅数显装置。
采用微机后,可使硬件数量大大减少,功能越来越强。
顾名思义,光电式传感器就是将光信号转化成电信号的一种器件,简称光电器件。
要将光信号转化成电信号,必须经过两个步骤:一是先将非电量的变化转化成光量的变化;二是通过光电器件的作用,将光量的变化转化成电量的变化。
这样就实现了将非电量的变化转化成电量的变化。
由于光电器件的物理基础是光电效应,光电器件是有响应速度快、可靠性较高、精度高、非接触式、结构简单等特点,因此光电式传感器在现代测量与控制系统中,应用非常广泛。
光纤光学及应用》》《光纤光学及应用研究生课程《研究生课程光纤光学》》课程《光纤光学第八章光纤光栅及其应用南开大学张伟刚教授第8 章光纤光栅及其应用8.1 引言8.2 光纤光栅基础8.3光纤光栅理论8.4光纤光栅应用8.1引言8118.1.1 光纤光栅概念(1)结构结构::功能::(2)功能8.1.2 发展重要事件8.2光纤光栅基础基本类8.2.1 基本类型(1)根据成栅物理机制不同:(2)根据折射率变化起因不同:(3)根据折射率变化结果不同:8.2.2 典型光纤光栅UFG)):(1)均匀光纤光栅(UFG(2)非均匀光纤光栅(NUFGNUFG)):8.2.3 折射率分布与反射谱(1)均匀光纤光栅⎛⎞①光纤布拉格光栅02()cos n z n n z π=+Δ⎜⎟Λ⎝⎠(8.1)FBG②闪耀闪耀光纤光栅光纤光栅⎡(8.2)002()1cos(cos )n z n n z πθ⎤=+Δ+⎢⎥Λ⎣⎦TFG(2)非均匀光纤光栅⎧①啁啾啁啾光纤光栅光纤光栅002()1cos (()n z n n z z πϕ⎫⎡⎤⎛⎞⎪⎪=±Δ++⎨⎬⎢⎥⎜⎟Λ⎝⎠⎪⎪⎣⎦⎩⎭(8.3)CFG②Tapered 光纤光栅⎛⎞⎞(8.4)2022()cos cos n z n n z z l ππ⎛=+Δ⎜⎟⎜⎟Λ⎝⎠⎝⎠Tapered Tapered --FG③Morié光纤光栅⎛⎞⎞(8.5)022()sin cos n z n n z z l ππ⎛=+Δ⎜⎟⎜⎟Λ⎝⎠⎝⎠Morié-FG④螺旋光纤光栅(8.6)0()()1cos(2)cos(2)g p n z n n z z z L νππ⎡⎤=+Δ+Λ⎣⎦SFG8.2.4 光纤光栅制作技术点写入法组合写入法(1)干涉写入法①驻波干涉法FG②全息相干法FG③模板衍射法相位掩模法FG③模板衍射法振幅掩模法FG(2)逐点写入法秒激光或CO2激光束FG(3)组合写入法压制法8.3光纤光栅理论8.3.1 光纤光栅典型理论光纤光栅典论(1)耦合模理论:不足之处(,,,)[()()](,)j j i zi zi tt jt E r z t A z eB z ee r eββωφφ→→=Σ+(8.7)j j jj z()()()()k j k j i zi zj t z t z k kj kjk kj kjkkdA i A K K ei B K K edzββββ−−+=Σ++Σ−(8.8a)()()()()k j k j i zi zj tz t z k kjkjk kj kjkkdB i A K K ei B K K edzββββ+−=−Σ−−Σ+(8.8b)j k t kjK (8.9)()()()()2*00,,,.,4a t kt jt kjKz r z e r e r rd dr πωεφφφφ→→=Δ∫∫2()()1cos ()eff eff n z n z z z πδδνϕ⎧⎫⎡⎤=++⎨⎬(8.10)ff ⎢⎥Λ⎣⎦⎩⎭02*00()(,).(,)2corecore ktjt kj n z n er e r rd drπωσδφφφ→→=∫∫(8.11)()()2kj kj z z νκσ=(8.12)2(8.13)()()2()cos[()]t kjkj kj K z z z z z πσκϕ=++Λ(8.8)2传输矩阵法:()不足之处1112()(0)s s A L A ⎛⎞⎛⎞⎛⎞⎜(814)2122()(0)s s B L B =⎜⎟⎜⎟⎟⎝⎠⎝⎠⎝⎠(8.14)1112s s ⎛⎞⎟(815)2122s s s =⎜⎝⎠(8.15)(122iqL iqL −−(816a)())111qqs rer e=−−((8.16a)())122221iqLiqLs rer e−−=−−(8.16b)()()1221121iqLiqLs s rr ee−−=−=−−(8.16c)(3)傅氏变化法:f (x )()*2()()j x F f x edxπνν∞−∞=∫(8.17)2()()j xf F v edvπνν∞=∫(8.18)−∞2n λΛ=**2(2)21n x x j j F x e dx f x e dx ππλ∞∞Λ⎡⎤⎡⎤⎛⎞==(8.19)()()f −∞−∞⎢⎥⎢⎥⎜⎟Λ⎝⎠⎣⎦⎣⎦∫∫()f (x )F (v )Λ=2nx **221112222yxjjy x F f e dy f edx n n n n ππλλ∞∞∞∞⎡⎤⎡⎤⎛⎞⎛⎞⎛⎞==⎜⎟⎜⎟⎜⎟⎢⎥⎢⎥Λ∫∫y (8.20)−∞−∞⎝⎠⎝⎠⎝⎠⎣⎦⎣⎦()2f x n ⎡⎤⎣⎦121)()x x F j d π∞⎛⎞⎛⎞⎟⎜⎟(821)2x ∞⎛⎞⎛1exp(2f n λλλ−∞=⎜⎝⎠⎝⎠∫(8.21)11exp()2x F f j dx n πλλ−∞⎞=−⎜⎟⎜⎟⎝⎠⎝⎠∫(8.22)(8.2020))(8.2222))11112F F πλ⎛⎞⎛⎞=⎜⎟⎜⎟Λ⎝⎠⎝⎠(8.23)耦合模理论传输矩阵法傅氏变换法8.3.2 光纤光栅基本性质光学性质(1)光学性质:①FBG 反射率和透射率ˆi h 2222222sinh ()ˆˆcosh ()()kj kj L R L κσκσσκ−=−−−(8.24)22ˆ(0)κσ+≥2222222ˆsinh (ˆˆL T κσ−=−−(8.25)22ˆ(0)κσ+<cosh ()()kj kj L κσσκ+②LPFG 导模与包层模透射率22222ˆ)ˆcos (ˆ1()g kj kj kj kj z T κσκσσκ+=+++(8.26)222ˆsin ()kj kj l z T κσ+=(8.27)1()kj kjκ+(2)传感性质:①FBG 温度与应变灵敏度()B T B S TλαξλΔ=+=Δ(8.28)()1B e S p ελΔ=−=(8.29)B λε②LPFG 温度与应变灵敏度()()T co co co co cl cl S n n αξαξ=+Λ−+Λ(8.30)()()11co co cl cl S p n p n ε=−Λ−−Λ(8.31)8.3.3 传感解调关联理论(1)光纤光栅传感模型(2)传感解调关联理论x 0OM (x ,t )x x dx →+)t )((832)(,x ψ(,,)d x t M x t dxψκ=(8.32)(,)x t ψx 0(,)(,)(,)x t x t M x t dxdt x t ψκψ=+000(,)x x x l t t ≤≤+<(8.33)00x t ∫∫()L λ(,,)G x t λ1(,,)()(,,)R x t L G x t λαλλ=(8.34)221112212(,,,)(,,)()(,,)P x t R x t d L G x t d λλλλλλαλλααλλλ==∫∫(8.35)S ()()21[(,)]i s i C x t S ξψξ=(8.36)()210(,)(,)(,)x ti s S x t C M x t dxdt x t ξψκψ−⎛⎞==+⎜⎟⎜⎟∫∫(8.37)()001i x t S ξ⎝⎠()2211(,).i s S M x t C x tS ξκξ−⎧⎫⎛⎞∂⎪⎪=⎜⎟⎨⎬⎜⎟∂∂(8.38)()1i ⎪⎪⎝⎠⎩⎭212(,,)1(,).(,,)s R x t M x t C x t R x t λκλ−⎧⎫⎛⎞∂⎪⎪=⎨⎬⎜⎟∂∂(8.39)1⎪⎪⎝⎠⎩⎭(8.40)2121(,,)(,).s P x t M x t C λ−⎧⎫⎛⎞∂⎪⎪=⎨⎬⎜⎟1(,,)x t P x t κλ∂∂⎪⎪⎝⎠⎩⎭221()()i S S i S C C M S M ξςκξ∂∂∂∂⎡⎤⎛⎞==⋅⋅+⋅⎜⎟⎢⎥(8.41)xM x ∂Ψ∂∂∂∂Ψ⎝⎠⎣⎦[(,)]s C x t ψ[(,)]s C x t ψ[(,)]s C x t ψ(3)典型关联解调方法分析①线性解调方法线性解调系统的两个实例如下图所示线性解调系统的两个实例如下图所示。