平面机构及其自由度
- 格式:docx
- 大小:155.43 KB
- 文档页数:9
机械设计基础第2章平面机构及其自由度平面机构是指由连续两个或几个构件组成的,构件之间只能相对运动而不能相对滑动的机械系统。
平面机构在机械设计中具有重要的地位和作用,对机械的运动与动力传递起着关键性的作用。
平面机构的自由度是指机构的可变参数个数,它决定了机构的端点能自由变动的方向和个数。
下面将对平面机构及其自由度进行详细介绍。
首先,平面机构是由构件和连接件组成的。
构件是构成机构的各个部分,如杆件、连杆、曲柄等;连接件是将构件连接起来的元件,如轴、销、螺钉等。
平面机构由构件和连接件组成的方式非常多样,常见的有链条、带传动、蜗杆传动等。
其次,平面机构的自由度是指机构中能够自由变动的独立参数的个数。
平面机构的自由度可以通过基本的“Grubler准则”来判断,该准则规定了平面机构的自由度与机构的构件数量、构件之间的连接方式以及约束关系有关。
根据Grubler准则,平面机构的自由度F可以由以下公式计算得出:F=3n-2j-h其中,n为构件的个数,j为构件之间的约束关系的个数,h为连接件的个数。
通过计算可以得出平面机构的自由度,进而可以判断机构的运动性能以及机构的设计是否合理。
进一步说,平面机构的自由度决定了机构的运动性能和应用范围。
例如,当机构的自由度为0时,表示机构不能进行自由运动,仅能进行固定运动,此时机构称为完全约束机构;当机构的自由度为1时,表示机构可以在一个平面内自由变动,即平移运动,此时机构称为平动机构;当机构的自由度为2时,表示机构可以在一个平面内同时进行转动和平移运动,此时机构称为空间机构。
最后,平面机构的自由度也与机构的稳定性有关。
在机构设计中,稳定性是指机构在工作过程中能够保持良好的运动性能和结构稳定性。
对于平面机构,当自由度与约束关系的个数相等时,机构处于临界平衡状态,稳定性最差,容易产生摇摆和不稳定的运动;当自由度小于约束关系的个数时,机构稳定性较好,能够稳定地进行运动。
综上所述,平面机构是机械设计中重要的内容之一,它的自由度决定了机构的运动性能和应用范围,而稳定性则保证了机构的正常工作。
平面机构的自由度与运动分析一、平面机构的自由度平面机构是指机构中的构件只能在一个平面内运动的机构,它由多个连接杆、转动副和滑动副组成。
平面机构的自由度是指机构中能够独立变换位置的最小的连接杆数目,也可以理解为机构中独立的变量的数量。
对于平面机构,其自由度可以通过以下公式计算:自由度=3n-2j-h其中,n表示连接杆的数量,j表示驱动链的数量,h表示外部约束的数量。
根据上述公式可以看出,自由度与平面机构中连接杆的数量和驱动链和外部约束的数量有关。
连接杆的数量越多,机构的自由度就越大,可以实现更复杂的运动。
驱动链的数量越多,机构中的动力驱动器越多,自由度就越小,机构的运动变得更加确定。
外部约束的数量越多,机构中的约束条件就越多,自由度就越小,机构的运动也会变得更加确定。
二、平面机构的运动分析1.闭合链和链架分析:首先需要确定机构中的闭合链和链架,闭合链是指机构中连接杆形成一个封闭的回路,闭合链中的连接杆数目应该为n 或n-1,n是机构中的连接杆数量。
链架是指机构中的连接杆形成一个开放的链路。
通过分析闭合链和链架中的链接关系和约束条件,可以确定机构中构件的位置和运动方式。
2.位置和速度分析:根据机构的连接杆的长度和角度,可以通过几何方法或代数方法确定机构中构件的位置和速度分量。
通过分析连接杆的长度和角度的变化规律,可以推导出机构中构件的位置和速度随时间的变化关系。
3.加速度和动力学分析:根据机构中各个构件的位置和速度,可以通过几何方法或动力学方法计算构件的加速度和动力学特性。
通过分析机构中构件的加速度和动力学特性,可以确定机构中构件的运动稳定性和质量分布。
4.动力分析:对于需要携带负载或进行力学传动的机构,需要进行动力学分析,确定机构中各个构件的受力和承载能力。
通过分析机构中构件的受力情况,可以确定机构的设计参数和强度要求。
总结起来,平面机构的自由度与运动分析是确定机构中构件位置和运动状态的重要方法,通过分析机构中的闭合链和链架、构件的位置和速度、加速度和动力学特性,可以确定机构的运动方式和特性,为机构的设计和优化提供依据。
机械原理第1章平面机构的自由度平面机构是由若干个刚体连接而成的机械装置,在平面内具有一定的运动自由度。
自由度可以理解为机构在平面内可以自由运动的独立变量数量。
平面机构的自由度决定了机构能够完成的运动类型和运动方式。
本文将介绍平面机构的自由度及其计算方法。
1.平面机构的自由度概述平面机构的自由度是指机构在平面内可以独立变化的运动数量。
自由度主要用来衡量机构的可动性。
平面机构的自由度与机构中连杆数量、铰链数量和约束数量有关。
2.平面机构的自由度计算方法计算平面机构的自由度需要考虑以下几个因素:(1)每个连接处的约束数量:连接处的约束数量主要包括铰链和滑动副的数量。
每个铰链都会增加机构的一个自由度,而滑动副不会增加机构的自由度。
(2)连杆数量:连杆数量决定了机构的自由度上限。
当机构的连杆数量等于自由度时,机构将达到满足完整约束的状态。
(3)约束条件:约束条件包括几何约束和运动约束。
几何约束是由机构的结构确定的,它限制了机构的运动范围。
运动约束是由机构的运动特性确定的,它限制了机构可进行的运动类型。
根据以上因素,计算平面机构的自由度的一般方法如下:(1)确定机构中的连杆数量和连接处的约束数量;(2)根据每个连接处的约束数量计算机构的几何约束;(3)根据机构的几何约束和运动约束计算机构的自由度。
3.平面机构自由度的实例分析以常见的四杆机构为例来说明平面机构自由度的计算方法。
四杆机构由四个连杆和四个铰链连接而成。
(1)连杆数量:四杆机构中连杆的数量为4(2)连接处的约束数量:四杆机构中每个连接处都是铰链连接,因此约束数量为4(3)几何约束:四杆机构中的几何约束是由四个连杆的长度和位置确定的。
根据欧拉公式,每个连接处的铰链都会增加一个约束条件。
因此,四杆机构中总共有4个几何约束。
(4)运动约束:四杆机构中的运动约束主要来自于连杆的连接方式和几何约束。
通过分析四杆机构的连杆和铰链的连接方式,可以得出四杆机构中由于几何约束而引入的自由度为1、因此,四杆机构的运动约束为1根据以上计算方法,四杆机构的自由度等于约束数量减去几何约束和运动约束的数量,即自由度=4-4-1=-1、这表明四杆机构无法进行独立的运动,它不是一个有效的机构。
平面机构及其自由度
1、理解机械、机器、机构、构件、自由度等基本概念。
2、熟悉运动副的概念、类型和表示方法。
初步掌握平面机构运动简图的
绘制方法和技能。
3、熟练掌握平面机构自由度的计算方法及机构具有确定的相对运动的条
件。
重点:运动副及平面机构运动简图的绘制
难点:平面机构自由度的计算方法及机构具有确定的相对运动
的条件
组织教学- 引入课题- 讲解新课-- 练习-- 总结
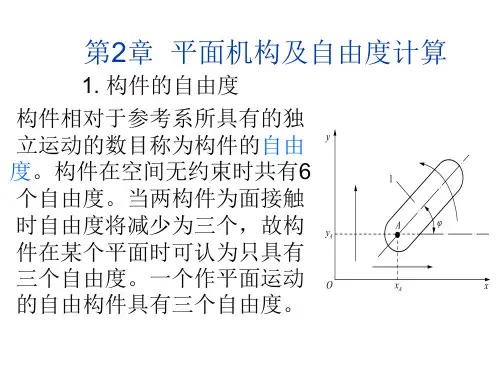
的构件有3个自由度。
机构的组成:机架、原动件、从动件
二、运动副及运动简图
1、运动副的概念及分类
运动副:机构由构件组合而成,每个构件都以一定的方式至少与另一构件相连接,这种两构件通过直接接触,既保持联系又能相对运动的联接,称为运动副,也可以说运动副就是两构件间的可动联接。
运动副的分类:按两构件间的接触特性,平面运动副可分为低副和高副
1) 低副
两构件间为面接触的运动副称为低副。
根据构成低副的两构件间的相对运动特点,又分为转动副和移动副
转动副:两构件只能作相对转动的运动副为转动副。
轴承与轴颈的联接,铰链联接等都属转动副。
移动副:是两构件只能沿某一轴线相对移动的运动副。
a> b) c) d)
2) 咼副
两构件间为点、线接触的运动副称为高副,如图2-9所示的车轮与钢轨、
凸轮与从动件、齿轮啮合等均为高副。
2
2
运动副的表示方法
2
2
2
2
1
1
1
1
(a)
(b)
1
1
2
2
1
1
2
2
2
3
4
2)移动副
1)转动副
3 )齿轮副
匚几 {
)凸轮副
2、绘制机构运动简图的步骤
机构运动简图:忽略构件和运动副结构形状,用国家标准规定的简单符号和线条代表运动副和构件,并按一定的比例尺寸表示机构中构件和运动副相对应位置及运动关系尺寸,而绘制成的表示机构简明图形的图称为机构运动简图。
1)分析机械的工作情况
找出机架,确定原动件和从动件。
2)分析机械运动情况
从原动件开始,沿着运动传递路线逐一分析各构件间相对运动的性质,确定构件的数目、运动副的类型和数目。
3)合理选择视图平面
选择多数构件所在的运动平面或平行于运动平面的平面作为视图平面。
4)绘制机构运动简图:
选择合适的比例尺,测量出各运动副的相对位置,用规定的符号绘制机
构运动简图。
例:见课本
三、机构具有确定运动的条件
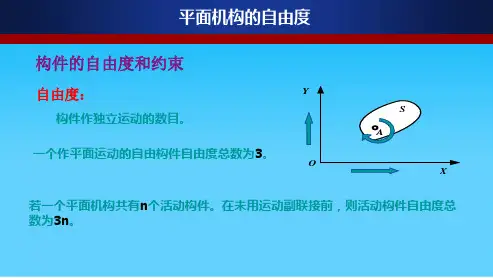
1、构件的自由度
一个做平面运动的自由构件有■x轴方向移动
■y轴方向移动
■xOy平面的转动
2、构件的约束
当两个构件直接接触组成运动副之后,它们的相对运动就受到限制,自由度随之减少。
运动副对构件的独立运动所加的限制称为约束。
不同类型的运动副引入的约束数不同。
每引入一个约束,构件就减少一个自由度。
♦转动副:限制两个自由度
约束了x、y两个方向的移动,只保留一个转动。
♦移动副:限制两个自由度
约束了沿y轴方向的移动和在xOy平面内的转动,只保留沿x轴方向的移动;
♦高副:限制一个自由度
只约束了沿接触处公法线n-n方向的移动。
3、平面机构自由度的计算
F = 3n-2PL-PH
n ------ 活动构件的数目
PL ――低副的数目
PH ――高副的数目。
例1 :计算图示杆机构的自由度
解:n=3 PL=4 PH=1
F=3 n-2PL-PH
=3X 3-2 X 4-1
例2:试机算图示航空照相机快门机构的自由
度
F=3 n-2PL-PH
解:n=5 PL=7 PH=0
=3 X 5-2 X 7-0
=1
4、计算平面机构自由度时的注意事项
1)复合铰链
两个以上构件在同一处以转动副相连接构成的运动副称为复合铰链。
k个构件在一处以转动副相连,应具有k-1个转动副。
例:计算机构自由度
解:n=5, PL=7, PH=O
2) 局部自由度
机构中出现的与输出、输入运动无关的自由度称为局部自由度。
女口凸轮机构,滚子绕本身轴线的转动不影响其他构件的运动,该转动的自由度即局部自由度。
♦计算时先把滚子看成与从动件连成一体,消除转动副后再计算其自由度,此时机构中:
n=2, PL = 2, PH = 1
贝U: F = 3n —2PL- PH= 3X 2 —2X 2 —1 = 1
3) 虚约束
在实际机构中,有些运动副所起的约束作用是重复的,这种不起独立限制作用的重复约束称为虚约束。
在计算机构自由度时,虚约束应除去不计。
平面机构中的虚约束,常出现在以下情况中:
(1)轨迹重合:
计算机构自由度时,应将构件5及两个转动副E、F去掉。
(2)导路平行或重合的移动副
两构件构成多个导路相互平行的移动副时,会出现虚约束。
处理时只有一个起约束作用,另一个则为虚约束。
(3)轴线重合的转动副
两构件构成多个轴线相互重合的转动副,会出现虚约束。
只有一个起约束作用,另一个为虚约束。
(4)传动对称
机构中传递运动而不起独立作用的对称部分形成虚约束。
例:计算大筛机构的自由度
解:F= 3n—2PL—PH = 3X 7-2X 9- 1 = 2
5、机构具有确定运动的条件
机构具有确定运动的充要条件:自由度F必须大于零,且原动件数等于机构的自由度数。
、小结:板书用列表形式
四、布置作业:。