机械设计基础第1章平面机构的自由度
- 格式:ppt
- 大小:1.75 MB
- 文档页数:52
第1章 平面机构的自由度和速度分析本章要点:1、理解运动副及其分类,熟识各种平面运动副的一般表示方法;了解平面机构的组成。
2、熟练看懂教材中的平面机构的运动简图。
3、能够正确判断和处理平面机构运动简图中的复合铰链、局部自由度和常见的虚约束,综合运用公式F=3n-2P L -P H 计算平面机构的自由度并判断其运动是否确定。
第一节 平面机构的组成基本概念1、平面机构的定义:所有构件都在互相平行的平面内运动的机构2、自由度:构件所具有的独立运动个数3、运动副:两个构件直接接触组成的仍能产生某些相对运动的联接 第二节 平面机构的运动简图平时观察机构的组成及运动形式时,不可能将复杂的机构全部绘制下来观看,应该将不必要的零件去掉,用简单的线条表示机构的运动形式:机构的运动简图、机构简图 步 骤1、运转机械,搞清楚运动副的性质、数目和构件数目;2、测量各运动副之间的尺寸,选投影面(运动平面);3、按比例绘制运动简图;简图比例尺:μl =实际尺寸 m / 图上长度mm4、检验机构是否满足运动确定的条件。
第三节 平面机构的自由度 一、平面机构自由度计算公式机构的自由度保证机构具有确定运动,机构中各构件相对于机架的独立运动数目 一个原动件只能提供一个独立运动 机构具有确定运动的条件为 自由度=原动件的个数平面机构的每个活动构件在未用运动副联接之前,都有三个自由度 经运动副相联后,构件自由度会有变化:自由度的计算公式 F=3n -(2PL +Ph )二、计算平面机构自由度的注意事项活动构件 构件总自由度 3×n 低副约束数 2 × P高副约束数1 × P h n1、复合铰链:两个以上的构件在同一处以转动副相联2、局部自由度:与输出件运动无关的自由度出现在加装滚子的场合,计算时应去掉Fp3、虚约束:对机构的运动实际不起作用的约束计算自由度时应去掉虚约束第四节速度瞬心及在机构速度分析上的应用机构运动分析的任务、目的和方法(1)任务:在已知机构尺寸及原动件运动规律的情况下,确定机构中其他构件上某些点的轨迹、位移、速度及加速度和构件的角位移、角速度及角加速度。
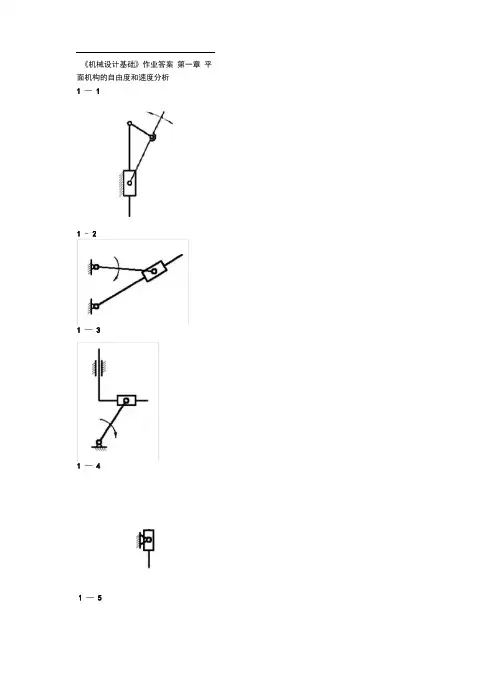
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1 —11 - 21 —31 —41 —5自由度为:F 3n (2P L P H P') F'3 7 (2 9 1 0) 121 19 11或:F 3n 2P L P H3 6 2 8 111-6自由度为F 3n (2P L P H P') F'3 9 (2 12 1 0) 11或:F 3n 2P L F H3 8 2 11 124 22 111 —10自由度为:F 3n (2P L P H P') F'3 10 (2 14 1 2 2) 130 28 11或:F 3n 2P L P H3 9 2 12 1 227 24 211 —11F 3n 2P L P H3 4 2 4 221 —13:求出题1-13图导杆机构的全部瞬心和构件1 R4R3 3 卩34只31、3的角速度比。
1 - 14:求出题1-14图正切机构的全部瞬心。
设1 10rad/s,求构件3的速度v3。
100v3v P13 1P14P310 200 2000mm/s1- 15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试1 R4p2 2 B4R2IP 24R 2I 2r 2IR 4P 12I r 11 10rad /s ,求机构全部瞬心、滑块速度 g 和连杆角速度1 P 4P 3I 10 AC tan BCA 916.565mm/sR 4R2 1 _100_10_ 2.9rad P 24R22 AC 1001 — 17:题1-17图所示平底摆动从动件凸轮 1为半径r 20的圆盘,圆盘中心 C 与凸轮回 转中心的距离l AC 15mm , l AB 90mm ,1 10rad /s ,求 00和 1800时,从动件角速度 2的数值和方向。
1 — 16 :题1-16图所示曲柄滑块机构,已知:1AB 100mm /s , I BC 250mm/s,在三角形ABC 中, BC sin 45°AB ------------- ,sin sin BCA BCA —, 5 cos BCA AC sin ABCBC sin 45° ,AC 310.7mm V 3 V p131 R4p 22 P24 P 2〔|P12 R3I|p2 P23I15 1090 152rad / s 方向如图中所示1 R2p3 2p2P23当1800时P2R3IP12P23IV——1.43rad / s90 15方向如图中所示第二章平面连杆机构2-1试根据题2-1图所注明的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双摇杆机构。
第1章平面机构的自由度和速度分析1.1复习笔记【通关提要】本章是本书的基础章节之一,主要介绍了平面机构自由度的计算和平面机构的速度分析。
学习时需要掌握平面机构运动简图的绘制、自由度的计算和速度瞬心的应用等内容。
本章主要以选择题、填空题和计算题的形式考查,复习时需把握其具体内容,重点记忆。
【重点难点归纳】一、运动副及其分类(见表1-1-1)表1-1-1运动副及其分类二、平面机构运动简图机构运动简图指用简单线条和符号来表示构件和运动副,并按比例定出各运动副的位置,来表明机构间相对运动关系的简化图形。
1.机构中运动副表示方法机构运动简图中的运动副的表示方法如图1-1-1所示。
图1-1-1平面运动副的表示方法2.构件的表示方法构件的表示方法如图1-1-2所示。
图1-1-2构件的表示方法3.机构中构件的分类(见表1-1-2)表1-1-2机构中构件的分类三、平面机构的自由度活动构件的自由度总数减去运动副引入的约束总数称为机构自由度,以F表示。
1.平面机构自由度计算公式F=3n-2P L-P H式中,n为机构中活动构件的数目;P L为低副的个数;P H为高副的个数。
机构具有确定运动的条件是:机构的自由度F>0且F等于原动件数目。
2.计算平面机构自由度的注意事项(见表1-1-3)表1-1-3计算平面机构自由度的注意事项四、速度瞬心及其在机构速度分析上的应用(见表1-1-4)表1-1-4速度瞬心及其应用1.2课后习题详解1-1至1-4绘出图示(图1-2-1~图1-2-4)的机构运动简图。
图1-2-1唧筒机构图1-2-2回转柱塞泵图1-2-3缝纫机下针机构图1-2-4偏心轮机构答:机构运动简图分别如图1-2-5~图1-2-8所示。
1-5至1-13指出(图1-2-9~图1-2-17)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度。
解:(1)图1-2-9所示机构的自由度为F=3n-2P L-P H=3×7-2×10-0=1(2)图1-2-10中,滚子1处有一个局部自由度,则该机构的自由度为F=3n-2P L-P H=3×6-2×9-0=0(3)图1-2-11中,滚子1处有一个局部自由度,则该机构的自由度为F=3n-2P L-P H=3×8-2×11-1=1(4)图1-2-12所示机构的自由度为F=3n-2P L-P H=3×8-2×11-0=2(5)图1-2-13所示机构的自由度为F=3n-2P L-P H=3×6-2×8-1=1(6)图1-2-14中,滚子1处有一个局部自由度,则该机构的自由度为F=3n-2P L-P H=3×4-2×5-1=1(7)图1-2-15中,滚子1处有一个局部自由度,A处为三个构件汇交的复合铰链,移动副B、B′的其中之一为虚约束。