第1章平面机构的自由度
- 格式:ppt
- 大小:15.75 MB
- 文档页数:34
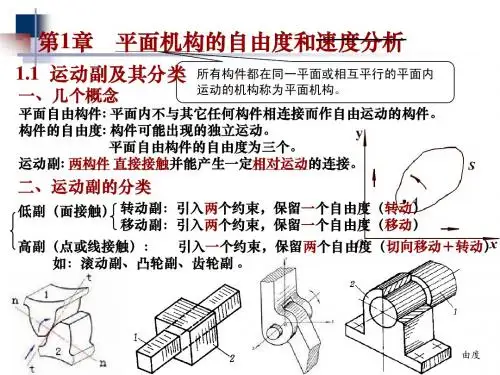
第1章 平面机构的自由度和速度分析本章要点:1、理解运动副及其分类,熟识各种平面运动副的一般表示方法;了解平面机构的组成。
2、熟练看懂教材中的平面机构的运动简图。
3、能够正确判断和处理平面机构运动简图中的复合铰链、局部自由度和常见的虚约束,综合运用公式F=3n-2P L -P H 计算平面机构的自由度并判断其运动是否确定。
第一节 平面机构的组成基本概念1、平面机构的定义:所有构件都在互相平行的平面内运动的机构2、自由度:构件所具有的独立运动个数3、运动副:两个构件直接接触组成的仍能产生某些相对运动的联接 第二节 平面机构的运动简图平时观察机构的组成及运动形式时,不可能将复杂的机构全部绘制下来观看,应该将不必要的零件去掉,用简单的线条表示机构的运动形式:机构的运动简图、机构简图 步 骤1、运转机械,搞清楚运动副的性质、数目和构件数目;2、测量各运动副之间的尺寸,选投影面(运动平面);3、按比例绘制运动简图;简图比例尺:μl =实际尺寸 m / 图上长度mm4、检验机构是否满足运动确定的条件。
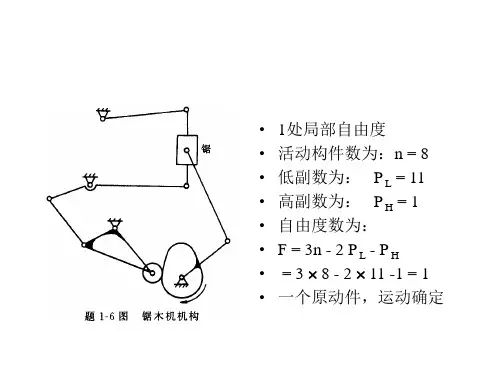
第三节 平面机构的自由度 一、平面机构自由度计算公式机构的自由度保证机构具有确定运动,机构中各构件相对于机架的独立运动数目 一个原动件只能提供一个独立运动 机构具有确定运动的条件为 自由度=原动件的个数平面机构的每个活动构件在未用运动副联接之前,都有三个自由度 经运动副相联后,构件自由度会有变化:自由度的计算公式 F=3n -(2PL +Ph )二、计算平面机构自由度的注意事项活动构件 构件总自由度 3×n 低副约束数 2 × P高副约束数1 × P h n1、复合铰链:两个以上的构件在同一处以转动副相联2、局部自由度:与输出件运动无关的自由度出现在加装滚子的场合,计算时应去掉Fp3、虚约束:对机构的运动实际不起作用的约束计算自由度时应去掉虚约束第四节速度瞬心及在机构速度分析上的应用机构运动分析的任务、目的和方法(1)任务:在已知机构尺寸及原动件运动规律的情况下,确定机构中其他构件上某些点的轨迹、位移、速度及加速度和构件的角位移、角速度及角加速度。
机械原理第1章平面机构的自由度平面机构是由若干个刚体连接而成的机械装置,在平面内具有一定的运动自由度。
自由度可以理解为机构在平面内可以自由运动的独立变量数量。
平面机构的自由度决定了机构能够完成的运动类型和运动方式。
本文将介绍平面机构的自由度及其计算方法。
1.平面机构的自由度概述平面机构的自由度是指机构在平面内可以独立变化的运动数量。
自由度主要用来衡量机构的可动性。
平面机构的自由度与机构中连杆数量、铰链数量和约束数量有关。
2.平面机构的自由度计算方法计算平面机构的自由度需要考虑以下几个因素:(1)每个连接处的约束数量:连接处的约束数量主要包括铰链和滑动副的数量。
每个铰链都会增加机构的一个自由度,而滑动副不会增加机构的自由度。
(2)连杆数量:连杆数量决定了机构的自由度上限。
当机构的连杆数量等于自由度时,机构将达到满足完整约束的状态。
(3)约束条件:约束条件包括几何约束和运动约束。
几何约束是由机构的结构确定的,它限制了机构的运动范围。
运动约束是由机构的运动特性确定的,它限制了机构可进行的运动类型。
根据以上因素,计算平面机构的自由度的一般方法如下:(1)确定机构中的连杆数量和连接处的约束数量;(2)根据每个连接处的约束数量计算机构的几何约束;(3)根据机构的几何约束和运动约束计算机构的自由度。
3.平面机构自由度的实例分析以常见的四杆机构为例来说明平面机构自由度的计算方法。
四杆机构由四个连杆和四个铰链连接而成。
(1)连杆数量:四杆机构中连杆的数量为4(2)连接处的约束数量:四杆机构中每个连接处都是铰链连接,因此约束数量为4(3)几何约束:四杆机构中的几何约束是由四个连杆的长度和位置确定的。
根据欧拉公式,每个连接处的铰链都会增加一个约束条件。
因此,四杆机构中总共有4个几何约束。
(4)运动约束:四杆机构中的运动约束主要来自于连杆的连接方式和几何约束。
通过分析四杆机构的连杆和铰链的连接方式,可以得出四杆机构中由于几何约束而引入的自由度为1、因此,四杆机构的运动约束为1根据以上计算方法,四杆机构的自由度等于约束数量减去几何约束和运动约束的数量,即自由度=4-4-1=-1、这表明四杆机构无法进行独立的运动,它不是一个有效的机构。