第1章变分法
- 格式:pdf
- 大小:1.15 MB
- 文档页数:42

第一章 变分法第一节 问题的性质(动态优化简介)一、静态优化问题如果一个企业要确定一个最优产出水平x *以最大利润F (x ):0max ()x F x ≥ (1)这样的问题的解是一数,即确定选择变量的单个最优值。
通常有一阶条件()0F x *'=。
并不是有多期的时间就..........是动态问题.....。
考虑企业的多期(multiperiod )问题: 1max (,)Tt t F t x =∑(0,1)t x t T =描述的是每阶段的产出组成的序列,即给出了一个产出的时间路径。
显而易见,利润不是由单期的产出决定,而是由整个的产出的时间路径确定,所以要使利润最大化,实质上是要找到一条最优的路径(而不是单个期的t x )。
但由于t 期利润只与t 期的产出有关,所以要在整个时间序列内最大化利润,就只要分别在每一期最大化利润即可(这一问题似乎是一种没有资本的很简单的生产活动)。
即这一个问题的解是一个有T 个数的集合,,T x x **。
所以由于作到一产量只影响该期利润,问题(2)实际上是一系列的静态问题,即在每一期选择当前产量使该期利润最大化。
可有类似的T 个一阶条件。
各期的一阶条件之间没有联系。
二、动态问题具有动态性质的问题是,当前的产出不但影响到当前的利润,还影响到未.....来.的利润。
11max (,,)Tt t t F t x x -=∑ 00(0)0,1t x x x st x t T =⎧⎨≥=⎩给定或 (3) 这个问题中,每一期的利润不但取决于当前产量,还与过去的产量有关;换句话说,t 期选择的产量t x 不但影响t 期的利润,还会影响到以后的利润。
注意,上述问题中已指定了0x ,因为0x 影响到了以后的利润(即总利润)。
问题(3)与问题(2)不同,它的最优解的T 个一阶条件不能分别确定,而是要同时确定,也就是我们实际上要“一次性”确定一条最优路径.............。
![飞行器结构动力学_第1章_2014版 [兼容模式]](https://uimg.taocdn.com/1a6d4b0ede80d4d8d15a4f4f.webp)
结构化学基础总结第一章:量子力学基础知识一、3个实验1、黑体辐射实验:(1)黑体:被认为是可以吸收全部外来辐射的物体,是理想的辐射体。
理想黑体可以吸收所有照射到它表面的电磁辐射,并将这些辐射转化为热辐射,其光谱特征仅与该黑体的温度有关,与黑体的材质无关。
可见光:400-700nm(2)假设:黑体吸收或发射辐射的能量是不连续的,而是分子一份一份的,即,量子化的。
E=hμ2、光电效应实验和Einstein光子学说:光量子化和光的波粒二象性本质。
(1)Einstein提出来了光量子(光子)。
波的性质:衍射、干涉。
E=hμ粒子的性质:反射、折射。
P=h/λ光子的动能与入射光的频率成正比,与光的强度无关。
(2)Heisenberg不确定度关系:Δq∙Δp≥ℏΔq坐标不确定量;Δp动量不确定量;q广义坐标单缝衍射:某粒子坐标确定得愈精确,其相应动量就愈不确定。
h可作为区分宏、微观粒子的标准:宏观h=0,微观h不能看作0。
3、氢原子光谱与Born氢原子模型:(1)氢原子光谱:指的是氢原子内之电子在不同能级跃迁时所发射或吸收不同波长、能量之光子而得到的光谱。
氢原子光谱为不连续的线光谱,自无线电波、微波、红外光、可见光、到紫外光区段都有可能有其谱线。
根据电子跃迁的后所处的能阶,可将光谱分为不同的线系。
(2)在卢瑟福模型的基础上,玻尔提出了电子在核外的量子化轨道,解决了原子结构的稳定性问题,描绘出了完整而令人信服的原子结构学说。
定态假设:原子的核外电子在轨道上运行时,只能够稳定地存在于具有分立的、固定能量的状态中,这些状态称为定态(能级),即处于定态的原子能量是量子化的。
此时,原子并不辐射能量,是稳定的。
激发态:原子受到辐射、加热或通电时,获得能量后电子可以跃迁到离核较远的轨道上去,即电子被激发到高能量的轨道上,这时原子处于激发态。
处于激发态的电子不稳定,可以跃迁到离核较近的轨道上,同时释放出光子。
二、量子力学基本假设1、假设1:对于一个量子力学体系,可以用坐标和时间变量的函数ψ(x,y,z,t)来描述,它包括体系的全部信息。

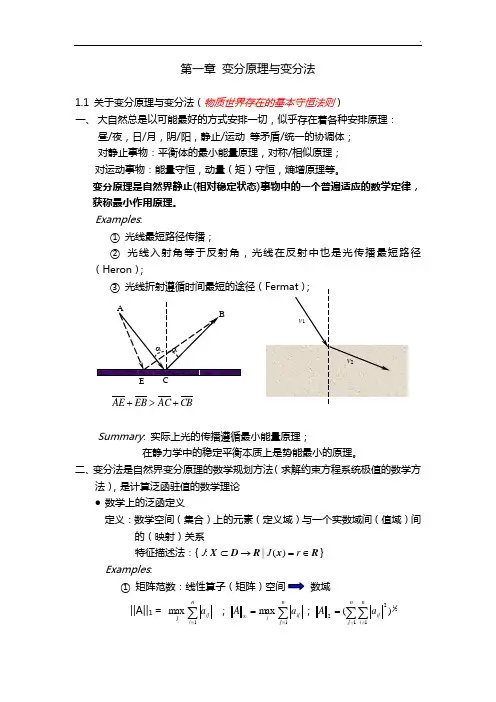
第一章 变分原理与变分法1.1 关于变分原理与变分法(物质世界存在的基本守恒法则)一、 大自然总是以可能最好的方式安排一切,似乎存在着各种安排原理:昼/夜,日/月,阴/阳,静止/运动 等矛盾/统一的协调体; 对静止事物:平衡体的最小能量原理,对称/相似原理;对运动事物:能量守恒,动量(矩)守恒,熵增原理等。
变分原理是自然界静止(相对稳定状态)事物中的一个普遍适应的数学定律,获称最小作用原理。
Examples :① 光线最短路径传播;② 光线入射角等于反射角,光线在反射中也是光传播最短路径(Heron );③CB AC EB AE +>+Summary : 实际上光的传播遵循最小能量原理;在静力学中的稳定平衡本质上是势能最小的原理。
二、变分法是自然界变分原理的数学规划方法(求解约束方程系统极值的数学方法),是计算泛函驻值的数学理论数学上的泛函定义定义:数学空间(集合)上的元素(定义域)与一个实数域间(值域)间的(映射)关系特征描述法:{ J :R x R D X ∈=→⊂r J )(|}Examples :① 矩阵范数:线性算子(矩阵)空间 数域‖A ‖1 = ∑=ni ij ja 1max ;∑=∞=nj ij ia A 1max;21)(1122∑∑===n j ni ij a A② 函数的积分: 函数空间数域 D ⊂=⎰n ba n f dxx f J )(Note : 泛函的自变量是集合中的元素(定义域);值域是实数域。
Discussion :① 判定下列那些是泛函:)(max x f f b x a <<=;x y x f ∂∂),(; 3x+5y=2; ⎰+∞∞-=-)()()(00x f dx x f x x δ ② 试举另一泛函例子。
物理问题中的泛函举例① 弹性地基梁的系统势能i. 梁的弯曲应变能: ⎰=∏l b dx dxw d EJ 0222)(21ii. 弹性地基贮存的能量: dx kw l f ⎰=∏0221 iii. 外力位能: ⎰-=∏l l qwdx 0iv. 系统总的势能:000;})({221222021===-+=∏⎰dxdww x dx qw kw dxw d EJ l泛函的提法:有一种梁的挠度函数(与载荷无关),就会有一个对应的系统势能。

适合物理专业的变分法教材变分法是物理学中常用的一种数学工具,它广泛应用于各个物理学领域,尤其是在传统和现代力学以及场论中。
在这篇文章中,我们将一步步地介绍变分法的基本概念和使用方法。
首先,让我们从一个基本问题开始,即如何利用变分法求解一个简单的极值问题。
假设我们有一个函数f(x),我们希望找到使得f(x)取得极小值的函数x。
为了做到这一点,我们可以通过对函数f(x)进行微小的变化,来确定x的变化对应的f(x)的变化。
这种微小的变化可以使用符号δ来表示。
接下来,我们需要确定f(x+δ)和f(x)之间的关系。
根据泰勒展开定理,我们可以将f(x+δ)在x 处展开成一个幂级数,并忽略高阶无穷小量。
这样,我们可以得到f(x+δ)的近似表达式:f(x+δ)≈f(x)+δf'(x),其中f'(x)表示f(x)对x的导数。
然后,我们需要定义一个度量函数,用来评估f(x)的变化对应的f(x+δ)的变化。
这个度量函数通常称为泛函,并用F表示。
泛函通常取决于f(x)和f'(x)。
在这个例子中,我们可以选择F[f]=∫[a,b]L(x,f(x),f'(x))dx作为我们的泛函。
这里,L(x,f(x),f'(x))是一个关于x、f(x)和f'(x)的函数,它通常称为拉格朗日量。
接下来,我们的目标是找到一个函数f(x),使得泛函F[f]取得极小值。
为了实现这一目标,我们可以考虑对f(x)进行微小的变化,即f(x+δ),并计算泛函F[f+δ]−F[f]。
通过将这个表达式展开并忽略高阶无穷小量,我们可以得到一个近似的表达式:F[f+δ]−F[f]≈∫[a,b][∂L/∂fδ+∂L/∂f'δ'] dx,其中δ'=d(δ)/dx。
现在,我们可以利用分部积分法将上述表达式进行重写。
通过将表达式中的导数部分进行分部积分,并考虑边界条件,我们可以得到F[f+δ]−F[f]≈∫[a,b][(∂L/∂f−d/dx(∂L/∂f'))δ+∂L/∂f'δ']dx。
