第3章_基于虚位移原理的变分法(1)
- 格式:ppt
- 大小:747.50 KB
- 文档页数:13
![1[1].广义变分原理及其应用1.](https://uimg.taocdn.com/28266f2fb4daa58da0114a00.webp)
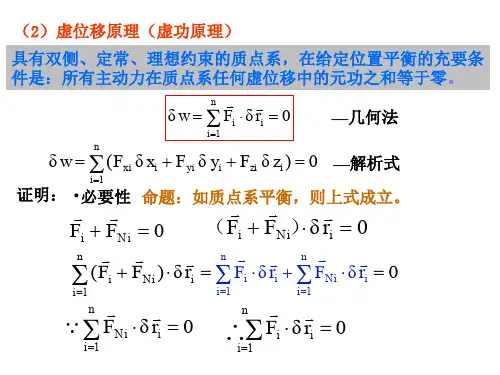
虚位移原理的定义
在物体的运动中,位移可以由许多因素引起,如外力、惯性、重力等。
虚位移原理的主要思想是将这些因素分离开,然后通过分析每个因素对位
移的贡献,来求解物体的运动方程。
1.确定系统的运动状态:首先,要明确系统的物体以及外部力的情况。
这些可以通过建立物体的坐标系和分析作用力得到。
2.定义虚位移:在给定的运动状态下,假设系统从位置A变化到位置B。
定义系统的虚位移为一个无限小的变化,并使其满足运动约束条件。
这个虚位移可以用一个一般的位移矢量δr来表示。
3.计算虚功:通过分析作用在系统上的外部力,计算出每个力对系统
虚位移的贡献。
这个贡献即代表了力对系统产生的虚功。
4.计算虚力:将虚功除以虚位移,得到一个常数,即为虚力。
这个虚
力与系统的其他因素(如惯性、重力)无关,只与外部力有关。
此外,虚位移原理还可以用于解决静力学、动力学和弹性力学等领域
的问题。
在静力学中,可以通过虚位移原理推导出平衡条件;在动力学中,可以用来分析系统的运动方程;在弹性力学中,可以通过虚位移原理推导
出材料的应力应变关系。
总之,虚位移原理是理论力学中一个十分重要的原理,它具有普遍性
和广泛应用性。
通过应用虚位移原理,我们可以更加简洁和有效地描述和
解决各种力学问题。
虚位移法的原理与应用1. 简介虚位移法(Virtual Displacement Method)是一种经典的结构力学分析方法。
它基于平衡原理和位移相容性原理,用虚位移原理来求解结构受力和变形问题。
本文将介绍虚位移法的原理以及其在实际工程中的应用。
2. 虚位移法的原理虚位移法的基本思想是,一个静力学问题可以通过最小化系统总势能来得到结构的相应。
虚位移法假设结构的位移场可以通过一个虚位移函数来表达,在满足边界条件的情况下,构建系统的虚功原理,可以得到结构的平衡方程。
具体来说,虚位移法的原理包括以下几个步骤:2.1 建立虚位移函数首先,建立一个虚位移函数,其满足边界条件以及位移相容性。
虚位移函数通常是一个多项式或三角函数形式。
2.2 计算系统总势能利用虚位移函数和受力情况,计算系统的总势能,可以通过对虚功原理的应用来得到。
2.3 最小化总势能将系统总势能对虚位移函数的系数进行变分,并令其为0,得到一组代数方程。
解这组方程可以得到结构的平衡方程。
2.4 求解结构响应由平衡方程,可以求解结构的受力分布和位移场分布。
3. 虚位移法的应用虚位移法广泛应用于各种结构的力学分析和设计中。
以下列举了一些虚位移法的应用领域:3.1 静力学分析虚位移法可以用于求解各种静力学问题,如梁、柱、桁架等结构的受力分析。
通过建立适当的虚位移函数,可以得到结构的内力分布和位移场。
3.2 动力学分析虚位移法也可以扩展到动力学分析中。
通过将虚位移函数与时间相关联,并结合动力学方程,可以求解结构的动态响应。
3.3 结构优化设计虚位移法可以用于结构的优化设计。
通过变分原理和虚功原理,可以最小化系统总势能,得到最优的结构形状和尺寸。
3.4 轴对称问题对于轴对称问题,虚位移法是一种非常有效的分析方法。
通过在径向和周向方向上引入合适的虚位移函数,可以求解轴对称结构的受力和位移问题。
4. 总结虚位移法是一种基于虚功原理的结构力学分析方法。
通过建立虚位移函数和最小化系统总势能,可以得到结构的平衡方程和响应。
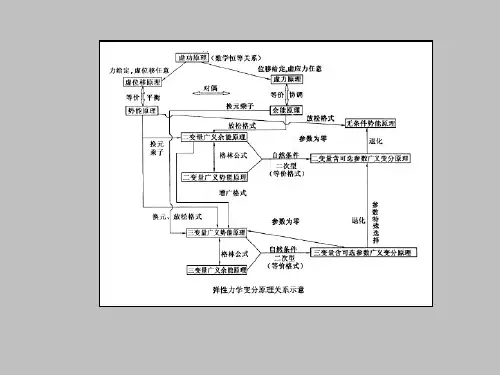
变分法基本原理范文变分法是一种数学方法,用于求解变分问题。
它是分析力学、泛函分析、控制论和最优化等领域中的基本工具之一、变分法的基本原理是根据给定的泛函,通过对其进行适当的变分,即对泛函的自变量进行微小的变化,在满足边界条件的前提下,寻找使得泛函取得极值的解。
这篇文章将介绍变分法的基本原理和应用。
在数学和物理中,泛函是函数的集合,其中自变量是函数。
泛函可以被视为一个函数空间中的点,它将函数映射为实数。
变分问题是在给定的约束条件下,寻找使得一些泛函取得极值的函数。
这个极值函数被称为变分问题的解。
变分法的基本思想是将泛函中的函数替换为具有相同边界条件的变分函数,并对这个变分函数进行微小的变化。
然后,通过求解变分函数的变分,来确定使得泛函取得极值的函数。
为了更好地理解变分法的基本原理,我们将通过一个简单的例子进行说明。
假设我们要求解下面的变分问题:\[ J[y] = \int_{x_1}^{x_2} F(x, y, y') dx \]这里,$y$是未知的函数,$y'$是$y$的导数,$x_1$和$x_2$是给定的边界点。
我们的目标是找到函数$y(x)$,使得泛函$J[y]$取得极值。
首先,我们引入一个变分函数$y(x) + \epsilon \eta(x)$,其中$\epsilon$是一个小的实数,$\eta(x)$是任意的可微函数,并满足边界条件$\eta(x_1) = \eta(x_2) = 0$。
然后,我们将变分函数代入原始的泛函中:\[ J[y + \epsilon \eta] = \int_{x_1}^{x_2} F(x, y + \epsilon \eta, y' + \epsilon \eta') dx \]在这里,$\eta'(x)$是$\eta(x)$的导数。
然后,我们对上述表达式关于$\epsilon$进行泰勒展开:\[ J[y + \epsilon \eta] = J[y] + \epsilon\frac{dJ[y]}{d\epsilon} + O(\epsilon^2) \]我们希望找到使得泛函取得极值的函数,因此可以令$\frac{dJ[y]}{d\epsilon}$等于零,即:\[ \frac{dJ[y + \epsilon \eta]}{d\epsilon} = \int_{x_1}^{x_2} \left( \frac{\partial F}{\partial y} \eta + \frac{\partialF}{\partial y'} \eta' \right) dx = 0 \]这里,我们利用了对泛函的导数与边界条件的关系$\frac{dJ[y]}{d\epsilon} = \frac{dJ[y+\epsilon\eta]}{d\epsilon}$。
第3章变分法与H AMILTON原理一、泛函与变分1.泛函普通函数是从数到数的映射()泛函是普通函数概念的推广,自变量可以为任意集合,集合数学物理中常见的泛函自变量常取为函数,[]。
例()是函数;[]()是泛函,并且有[][][]例[]∫ ( ) ,则()[]()[]例[]∫{()}泛函可类比于多变量函数,(){}[] { ()| 的定义域}这里的()相当于前面多变量函数的自变量,;泛函[]是以不可数无穷多个变量()()作为自变量的函数。
例复合函数可以看成是一族泛函,()[] ( ̇()) ( ()),其中是参数。
2.泛函的连续性对于泛函[],给定函数(),如果能够满足1 / 34,当|()()||()()|| ( )()( )()|时,有|[][]|则称泛函[]在处阶接近的连续。
3.变分泛函可类比于多变量函数,多变量函数(),自变量的微分为;泛函 [ ]的自变量为{ ()| 定义域},自变量的变分()() ( ),即函数的无穷小改变。
小参量法的定义为()(),其中为任意无穷小量,()为任意连续有界函数。
类似于数学分析中的-语言,这是严格的数学定义。
下面的叙述我们不追求数学上的严格性。
函数的微分()()()泛函的变分[][][]例[]()[]()()()()例位移⃗[]⃗(()()),虚位移⃗⃗(()())⃗(())⃗()。
例[]∫()(),(变分与积分可交换在后面证明)[][][]∫()()()()∫()()∫{()()()()}4.L AGRANGE变分基本引理2 / 34设()在区间[]上连续,()及其2阶导数在[]上连续,且在端点处() ()。
如果任意这样的函数()均满足∫()(),则必有[]()。
用反证法很容易证明:反设()(),不妨设()。
由于()连续,存在点的邻域[][],在[]上()。
现在构造()为(){[] ( ())( ())[]则∫()()∫()()∫()与∫()()矛盾,所以()()。