对称滑阀控制非对称液压缸系统传递函数的求解
- 格式:docx
- 大小:36.87 KB
- 文档页数:2
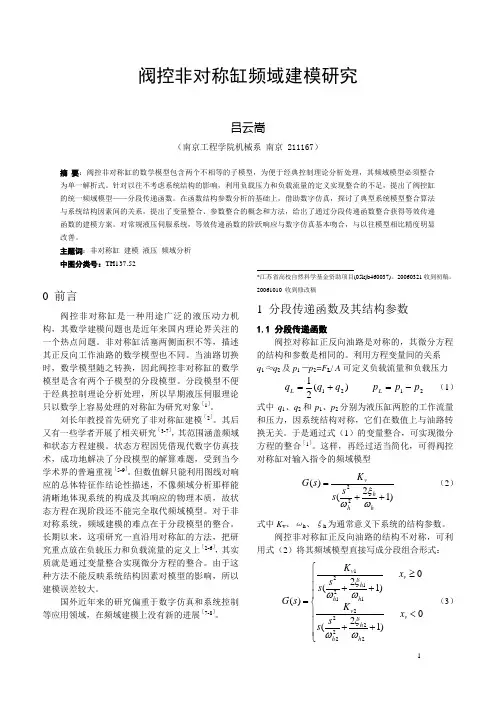
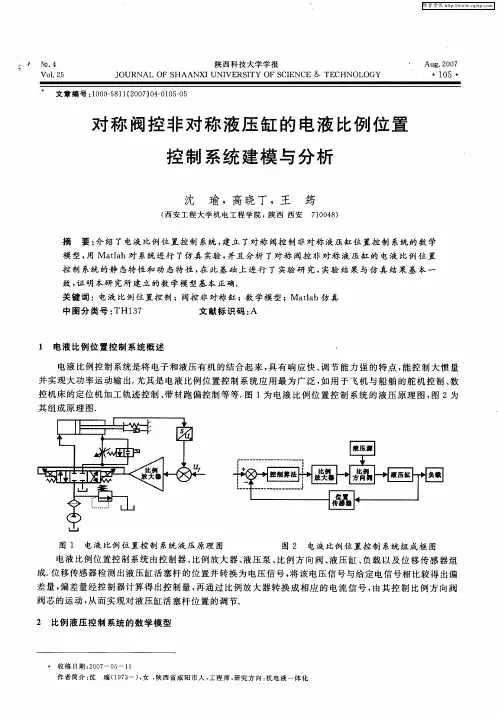
阀控非对称缸频域建模研究吕云嵩(南京工程学院机械系南京 211167)摘要:阀控非对称缸的数学模型包含两个不相等的子模型,为便于经典控制理论分析处理,其频域模型必须整合为单一解析式。
针对以往不考虑系统结构的影响,利用负载压力和负载流量的定义实现整合的不足,提出了阀控缸的统一频域模型——分段传递函数。
在函数结构参数分析的基础上,借助数字仿真,探讨了典型系统模型整合算法与系统结构因素间的关系,提出了变量整合、参数整合的概念和方法,给出了通过分段传递函数整合获得等效传递函数的建模方案。
对常规液压伺服系统,等效传递函数的阶跃响应与数字仿真基本吻合,与以往模型相比精度明显改善。
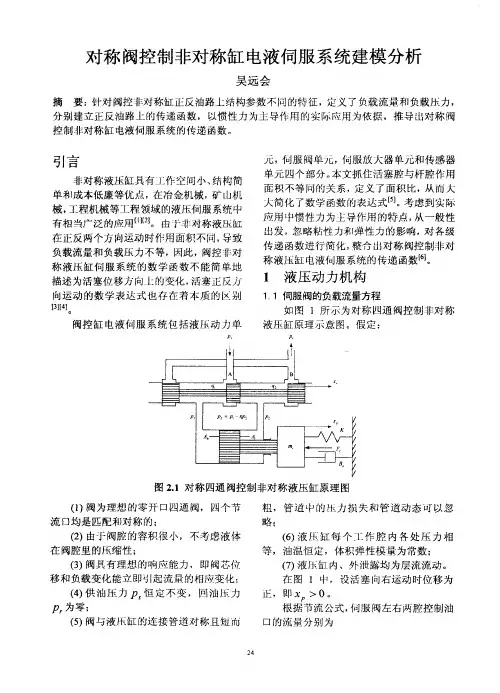
主题词:非对称缸建模液压频域分析中图分类号:TH137.520 前言阀控非对称缸是一种用途广泛的液压动力机构,其数学建模问题也是近年来国内理论界关注的一个热点问题。
非对称缸活塞两侧面积不等,描述其正反向工作油路的数学模型也不同。
当油路切换时,数学模型随之转换,因此阀控非对称缸的数学模型是含有两个子模型的分段模型。
分段模型不便于经典控制理论分析处理,所以早期液压伺服理论只以数学上容易处理的对称缸为研究对象[1]。
刘长年教授首先研究了非对称缸建模[2]。
其后又有一些学者开展了相关研究[3-7],其范围涵盖频域和状态方程建模。
状态方程因凭借现代数字仿真技术,成功地解决了分段模型的解算难题,受到当今学术界的普遍重视[5-9]。
但数值解只能利用图线对响应的总体特征作结论性描述,不像频域分析那样能清晰地体现系统的构成及其响应的物理本质,故状态方程在现阶段还不能完全取代频域模型。
对于非对称系统,频域建模的难点在于分段模型的整合。
长期以来,这项研究一直沿用对称缸的方法,把研究重点放在负载压力和负载流量的定义上[2-6],其实质就是通过变量整合实现微分方程的整合。
由于这种方法不能反映系统结构因素对模型的影响,所以建模误差较大。
国外近年来的研究偏重于数字仿真和系统控制等应用领域,在频域建模上没有新的进展[7-8]。
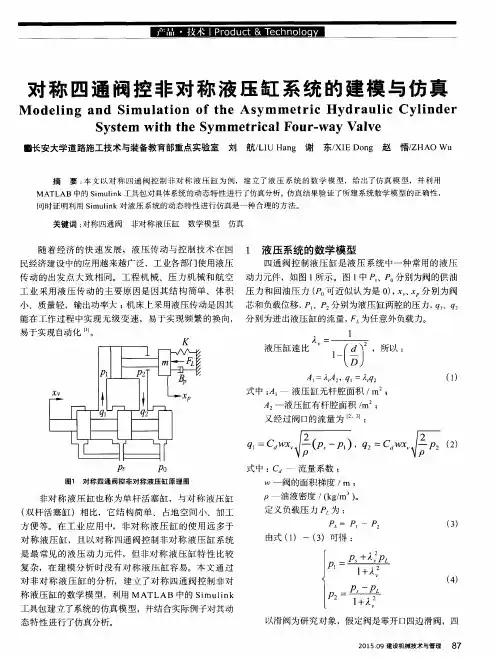
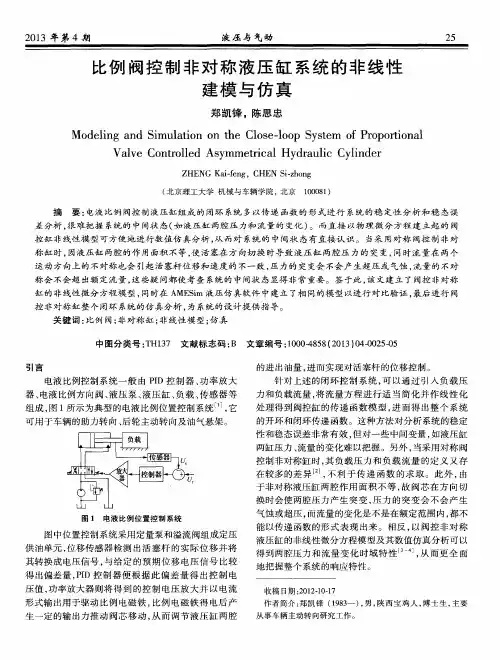
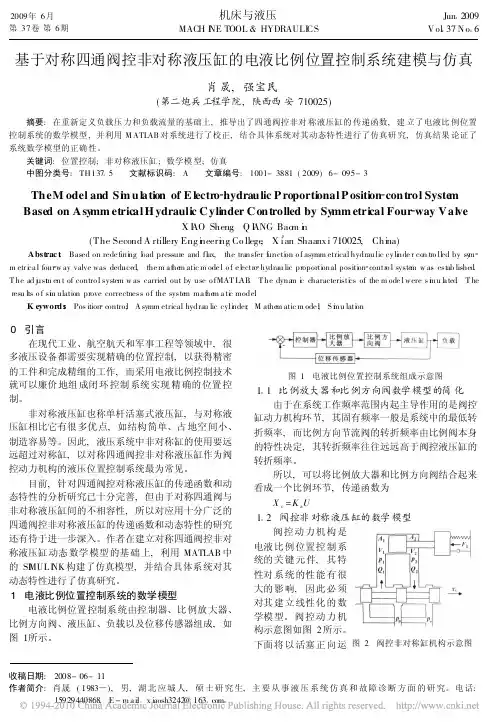
对称比例方向阀控制非对称缸在矫直机辊缝自动调节上的应用张柏森,李松,宋锦春,佟琨【摘要】摘要:介绍一种采用液压比例阀控制辊缝的新型管材矫直机的液压控制系统,通过PLC控制比例阀来控制液压缸位置,达到辊缝的自动调节和偏差补偿。
此新型管材矫直机采用8个阀控缸系统,实现辊缝自动调节,自动化程度高,辊缝调节简便。
在8个阀控缸系统中,由于对称阀控制非对称缸难度较大,只针对其中的非对称缸系统采用DSHplus软件进行了建模和仿真分析。
对对称阀控制非对称缸系统特性进行进一步的探讨,与对称阀控制对称缸系统进行比较,并针对对称阀控制非对称缸系统的两种常见补偿方法进行建模仿真,分析其补偿效果。
【期刊名称】机床与液压【年(卷),期】2012(040)013【总页数】4【关键词】矫直机;比例位置控制;对称阀控制非对称缸;辊缝自动调节矫直机是管材生产线上重要的精整设备。
对管材进行精密矫直,可以消除管材加工过程中由于外力作用、温度变化及内力消长产生的挠曲和变形[1],保证管材的直线度和圆度[2]。
传统的矫直机辊缝采用电机通过减速机驱动丝杆旋转调节,调节距离由表盘指示[2],机械结构复杂,调节过程费时费力。
当矫直管材的型号变更时,需要重新进行调节,耗费大量时间。
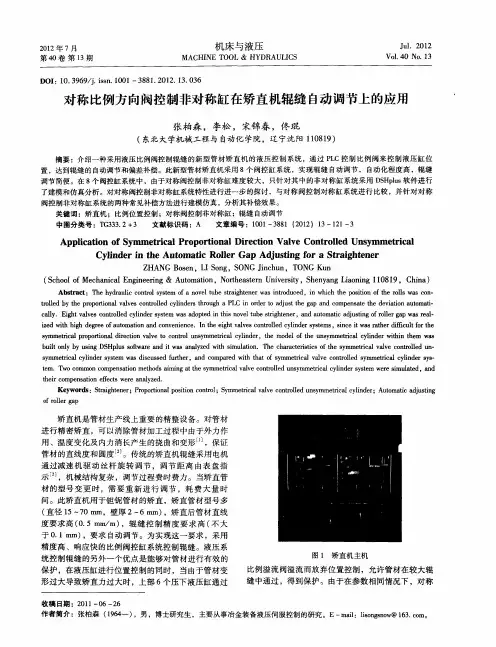
此矫直机用于钽铌管材的矫直,矫直管材型号多(直径15~70 mm,壁厚2~6 mm),矫直后管材直线度要求高(0.5 mm/m),辊缝控制精度要求高(不大于0.1 mm),要求自动调节。
为实现这一要求,采用精度高、响应快的比例阀控缸系统控制辊缝。
液压系统控制辊缝的另外一个优点是能够对管材进行有效的保护,在液压缸进行位置控制的同时,当由于管材变形过大导致矫直力过大时,上部6个压下液压缸通过比例溢流阀溢流而放弃位置控制,允许管材在较大辊缝中通过,得到保护。
由于在参数相同情况下,对称阀控制对称缸比控制单出杆非对称液压缸的动态性能好[3],此矫直机的6个上辊采用对称缸,下部2个反弯辊的控制液压缸由于受主机尺寸限制,采用单出杆缸,位移传感器内置(如图1)。
MECHANICAL ENGINEER阀控非对称液压缸数学模型及建模方法研究炘李晓园,陈,叶鹏,李鑫,徐祥,蒋辉,李琼柱(红塔烟草(集团)有限责任公司玉溪卷烟厂,云南玉溪653100)摘要:非对称液压缸两腔结构参数不同,给阀控非对称缸数学建模带来了较大的困难。
文中针对现行阀控非对称液压缸数学模型及简化方法作了分析比较,提出了一种新的简化方法,并据此导出了较为精确的数学模型。
关键词:非对称液压缸;数学模型;建模方法;辅助方程中图分类号:TH137文献标志码:A文章编号:1002-2333(2020)08-0104-04 Research on Mathematical Model and Modeling Method of Valve Controlled Asymmetric Hydraulic Cylinder LI Xiaoyuan,CHEN Xin,YE Peng,LI Xin,XU Xiang,JIANG Hui,LI Qiongzhu (The Second Workshop of Cigarette Packaging of Yuxi Cigarette Factory,Hongta Tobacco(group)Co.,Ltd.,Yuxi653100,China) Abstract:The structural parameters of the two chambers of the asymmetric hydraulic cylinder are different,which brings great difficulties to the mathematical modeling of the valve-controlled asymmetric cylinder.This paper analyzes and compares the current mathematical models and simplified methods of valve-controlled asymmetric hydraulic cylinders, proposes a new simplified method,and derives a more accurate mathematical model based on this.Keywords:asymmetric hydraulic cylinder;mathematical model;modeling method;auxiliary equation0引言液压控制系统的种类及分类方法很多,根据液压放大器与执行元件的不同组合,可分成阀控缸、阀控马达、泵控缸、泵控马达4种[1-2],其中阀控缸响应快、精度高、应用最广。
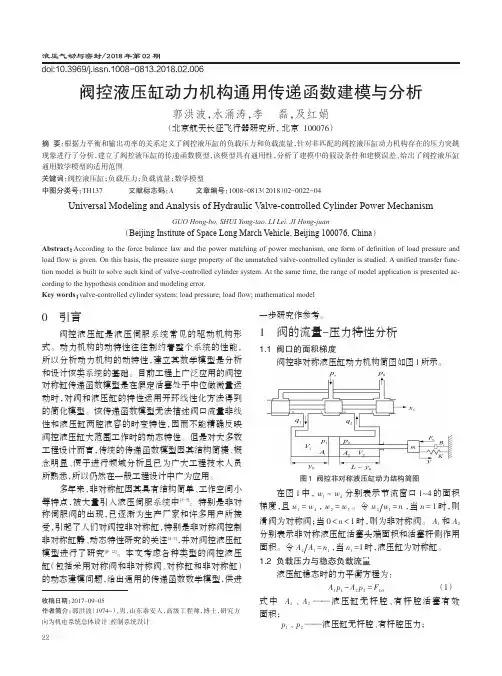
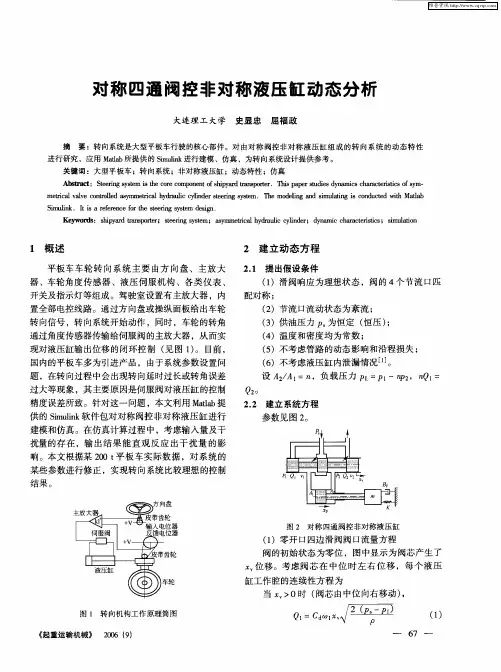
阀控液压缸传递函数模型应用与建模误差分析郭洪波;李磊;水涌涛;及红娟【摘要】根据建立的通用阀控液压缸传递函数模型,分析了非对称缸的最低液压固有频率与传递函数模型中液压缸固有频率的关系,给出了在阀控液压缸在工程设计中可供选择的最低液压固有频率理论计算公式及其经验公式;给出了阻尼比ζh、阀系数Kq和Kc的选取与工程计算方法.传递函数模型的建模误差分析结果表明,描述阀控非对称缸的滑阀流量方程和液压缸连续性方程不能同时满足且与最低液压固有频率的工作点不在同一个位置上,进一步揭示了阀控液压缸传递函数模型适用范围的局限性.【期刊名称】《流体传动与控制》【年(卷),期】2017(000)005【总页数】5页(P16-20)【关键词】阀控液压缸;数学模型;液压固有频率;建模误差【作者】郭洪波;李磊;水涌涛;及红娟【作者单位】北京航天长征飞行器研究所北京 100076;北京航天长征飞行器研究所北京 100076;北京航天长征飞行器研究所北京 100076;北京航天长征飞行器研究所北京 100076【正文语种】中文【中图分类】TH137阀控液压缸是液压伺服系统常见的驱动机构形式。
动力机构的动特性往往制约着整个系统的性能,所以分析动力机构的动特性,其数学模型是分析和设计该类系统的基础。
非对称缸因其具有结构简单、工作空间小等特点,被大量引入液压伺服系统中。
特别是非对称伺服阀的出现,已为生产厂家和许多用户所接受,引起了人们对阀控非对称缸,特别是非对称阀控制非对称缸静、动态特性研究的关注[1-4]。
阀控对称缸传递函数模型是在假定活塞处于中位做微量运动时,对阀和液压缸的特性运用开环线性化方法得到的简化模型。
由于阀控非对称缸的特殊之处,在建立动态方程时作了诸多简化和近似处理,所以描述其动态特性的传递函数模型具有很大近似性[5-8]。
这不仅仅表现在滑阀流量方程的小偏差线性化以及其它未建模动态上,还表现在描述阀控非对称缸的滑阀流量方程和液压缸连续性方程不能同时满足且与最低液压固有频率的工作点不在同一个位置上。
对称滑阀控制非对称液压缸系统传递函数的求解
和云敏
【期刊名称】《长江工程职业技术学院学报》
【年(卷),期】2013(030)003
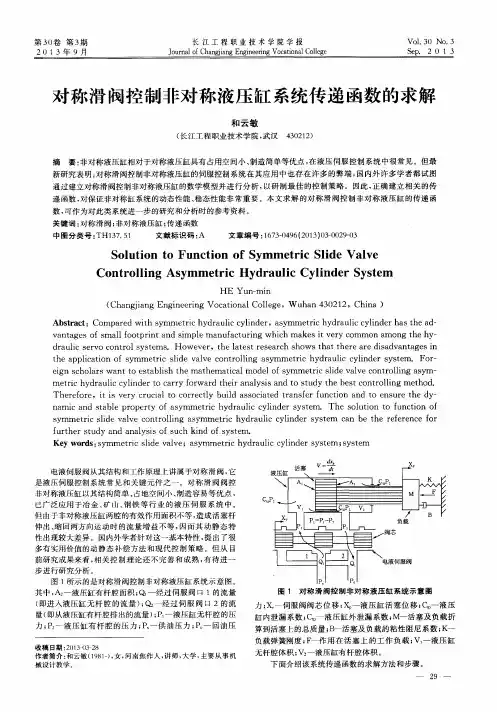
【摘要】非对称液压缸相对于对称液压缸具有占用空间小、制造简单等优点,在液压伺服控制系统中很常见.但最新研究表明:对称滑阀控制非对称液压缸的伺服控制系统在其应用中也存在许多的弊端,国内外许多学者都试图通过建立对称滑阀控制非对称液压缸的数学模型并进行分析,以研制最佳的控制策略.因此,正确建立相关的传递函数,对保证非对称缸系统的动态性能、稳态性能非常重要.本文求解的对称滑阀控制非对称液压缸的传递函数,可作为对此类系统进一步的研究和分析时的参考资料.
【总页数】3页(P29-31)
【作者】和云敏
【作者单位】长江工程职业技术学院,武汉430212
【正文语种】中文
【中图分类】TH137.51
【相关文献】
1.连铸机结晶器液压振动采用非对称型液压缸的传递函数的分析与计算 [J], 谷振云;李生斌
2.基于对称四通阀控非对称液压缸的电液比例位置控制系统建模与仿真 [J], 肖晟;
强宝民
3.基于MATIAB SIMULINK非对称阀控非对称液压缸控制系统的仿真分析 [J], 李东君
4.四边滑阀控制液压缸传递函数的一种求解方法 [J], 刘子龙;庄显义;刘国忠;李洪人;强盛
5.四通阀控非对称液压缸传递函数的分析和建立 [J], 蒙争争
因版权原因,仅展示原文概要,查看原文内容请购买。