线性系统作业1
- 格式:docx
- 大小:143.61 KB
- 文档页数:3
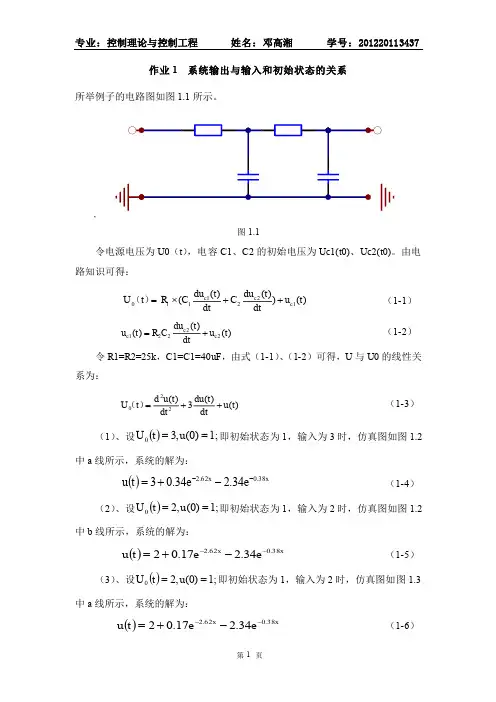
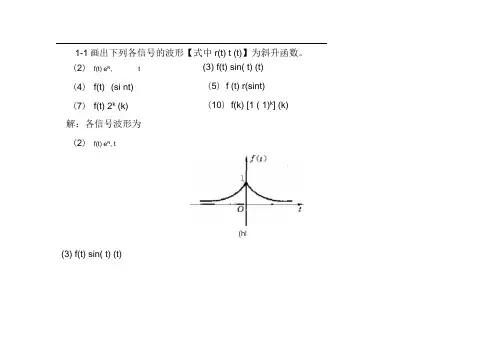
1-1画出下列各信号的波形【式中r(t) t (t)】为斜升函数。
(2) f(t) e N, t (4) f(t) (si nt) (7) f(t) 2k (k) 解:各信号波形为(2) f(t) e N, t (3) f(t) sin( t) (t) (5) f (t) r(sint) (10) f(k) [1 ( 1)k] (k)(hl(3) f(t) sin( t) (t)(4) f(t) (si nt)(d)(5) f(t) r(si nt)(7) f(t) 2k (k)(10) f(k) [1 ( 1)k] (k)2卜〔■■ 4* *0::2 3 4 5( 5 21-2画出下列各信号的波形[式中r(t)t (t)为斜升函数]。
(1) f(t) 2 (t 1) 3 (t1) (t 2)(2) f (t) r(t)2r(t1) r(t 2)(5) f(t)r(2t) (2 t)(8) f(k)k[ (k)(k 5)](11) f(k)k(k 7)](12) f(k)2k[ (3k) ( k)] sin( )[ (k)6解:各信号波形为⑴ f(t) 2 (t 1) 3 (t 1) (t 2)(5)f(t) r(2t) (2 t)r(t) 2r(t 1)r(t 2)j/O)Z\1 a7(b)⑵ f(t)4P -OF ■"■(8)f(k) k[ (k) (k 5)]O3)2 13,2<k(11)f(k) sin(~6)[ (k) (k 7)]fa)■MB -»r1.4 1 L_ K _o! 2 3 4 5 6(k)(12)f(k) 2k[ (3k) ( k)]g 8.I~o| 1 2 3 k(I)1-3写出图仁3所示各波形的表达式解图示各波形的表示式分别为:(a) /(f) — 2e(z — 1)—€(『一1) — F (t — 2.) (b)/ (t ) — (t —1)e (r — 1)—2(/—1)c ( f —1) — (t — 3)c ( / 一3)(= 10sint7rZ )_£(?) 一 M — 1 丿_= 1 — 2(r + 2) £(? + 2) — £(r + l)] + (r — 1) c(t H-l) —— 1)12.Ar>1.LIo i tb/(r)正菠函數—1 O l 23(b) I AO(d)1-4写出图1-4所示各序列的闭合形式表达式解图示各序列的闭台形式表示式分别为:(a)/(A)=讥+ 2) (b)/(A) = —3)——7)(c)/«) =e(-^+2) (d)f(k)= (一1)¥⑷1-5判别下列各序列是否为周期性的。

1.下列信号的分类方法不正确的是( A ):A 、数字信号和离散信号B 、确定信号和随机信号C 、周期信号和非周期信号D 、因果信号与反因果信号2.下列说法正确的是( D ):A 、两个周期信号x (t ),y (t )的和x (t )+y(t )一定是周期信号。
B 、两个周期信号x (t ),y (t )的周期分别为2和2,则其和信号x (t )+y(t ) 是周期信号。
C 、两个周期信号x (t ),y (t )的周期分别为2和π,其和信号x (t )+y(t )是周期信号。
D 、两个周期信号x (t ),y (t )的周期分别为2和3,其和信号x (t )+y(t )是周期信号。
3.下列说法不正确的是( D )。
A 、一般周期信号为功率信号。
B 、 时限信号(仅在有限时间区间不为零的非周期信号)为能量信号。
C 、ε(t )是功率信号;D 、e t 为能量信号;4.将信号f (t )变换为( A )称为对信号f (t )的平移或移位。
A 、f (t –t 0) B 、f (k–k 0) C 、f (at ) D 、f (-t )5.将信号f (t )变换为( A )称为对信号f (t )的尺度变换。
A 、f (at ) B 、f (t –k 0) C 、f (t –t 0) D 、f (-t )6.下列关于冲激函数性质的表达式不正确的是( B )。
A 、)()0()()(t f t t f δδ=B 、()t aat δδ1)(=C 、)(d )(t tεττδ=⎰∞- D 、)()-(t t δδ=7.下列关于冲激函数性质的表达式不正确的是( D )。
A 、⎰∞∞-='0d )(t t δ B 、)0(d )()(f t t t f =⎰+∞∞-δC 、)(d )(t tεττδ=⎰∞- D 、⎰∞∞-=')(d )(t t t δδ8.下列关于冲激函数性质的表达式不正确的是( B )。
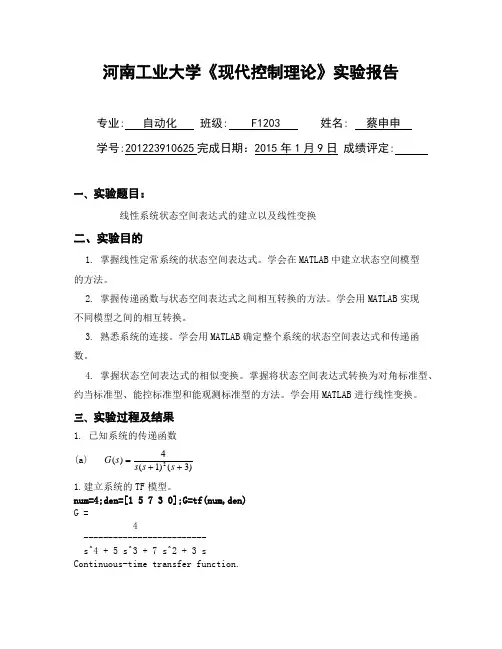
河南工业大学《现代控制理论》实验报告专业: 自动化 班级: F1203 姓名: 蔡申申 学号:201223910625完成日期:2015年1月9日 成绩评定:一、实验题目:线性系统状态空间表达式的建立以及线性变换二、实验目的1. 掌握线性定常系统的状态空间表达式。
学会在MATLAB 中建立状态空间模型的方法。
2. 掌握传递函数与状态空间表达式之间相互转换的方法。
学会用MATLAB 实现不同模型之间的相互转换。
3. 熟悉系统的连接。
学会用MATLAB 确定整个系统的状态空间表达式和传递函数。
4. 掌握状态空间表达式的相似变换。
掌握将状态空间表达式转换为对角标准型、约当标准型、能控标准型和能观测标准型的方法。
学会用MATLAB 进行线性变换。
三、实验过程及结果1. 已知系统的传递函数 (a) )3()1(4)(2++=s s s s G 1.建立系统的TF 模型。
num=4;den=[1 5 7 3 0];G=tf(num,den)G =4-------------------------s^4 + 5 s^3 + 7 s^2 + 3 sContinuous-time transfer function.2.将给定传递函数用函数ss( )转换为状态空间表达式。
再将得到的状态空间表达式用函数tf( )转换为传递函数,并与原传递函数进行比较。
2.1转换成状态空间表达式。
Gss=ss(G)Gss =a =x1 x2 x3 x4x1 -5 -1.75 -0.75 0x2 4 0 0 0x3 0 1 0 0x4 0 0 1 0b =u1x1 1x2 0x3 0x4 0c =x1 x2 x3 x4y1 0 0 0 1d =u1y1 0Continuous-time state-space model.2.2将状态空间表达式转换成传递函数并计较。
G1=tf(Gss)G1 =4-------------------------s^4 + 5 s^3 + 7 s^2 + 3 sContinuous-time transfer function.由之前的实验结果可得实验中的传递函数相同,因为线性变换不改变系统的传递函数。
第三章 线性时不变系统的标准形与最小阶实现把系统动态方程化为等价的简单而典型的形式,对于揭示系统代数结构的本质特征,以及系统的分析与设计将会带来很大的方便,因此利用等价变换化系统动态方程为标准形的问题成为线性系统理论中的一个重要课题。
在第一章中已经指出,动态方程等价变换的矩阵P 是由状态空间基底的选取来决定的。
因此常把构造P 阵的问题化为选取状态空间适当基底的问题来讨论。
由于所给的条件不同和选取基底的方法不同,从而可以得到各种不同形式的标准形。
在实际实用中,常是根据所研究问题的需要而决定采用什么样的标准形。
本章所介绍的几种标准形,是以后讨论极点配置和观测器设计等问题时要用到的。
实现问题,也是线性系统理论的重要课题之一。
这是因为:状态空间方法在系统设计和计算上都是以动态方程为基础的,为了应用这些方法,我们需要把传递函数阵用动态方程予以实现,特别是在有些实际问题中,由于系统物理过程比较复杂,通过分析的方法来建立它的动态方程十分困难,甚至不可能,这时可能采取途径之一就是先确定输入输出间的传递函数阵,然后根据传递函数阵来确定系统的动态方程。
其次,复杂系统的设计往往希望能在模拟计算机或数字计算机上仿真,以便在构成物理系统之前就能检查它的特性,系统的动态方程描述则比较便于仿真,例如在模拟机上指定积分器的输出作为变量,就很容易仿真系统。
在实际应用中,动态方程实现也提供了运算放大器电路综合传递函数的一个方法。
每一个可实现的传递函数阵,可以有无限多个实现。
我们感兴趣的是这些实现中维数最小的实现,即最小阶实现。
在实用中,最小阶实现在网络综合和系统仿真时,所用到的元件和积分器最少,从经济和灵敏度的角度来看是必要的。
关于有理函数阵的最小阶实现问题,定理2—20及定理2—21是基本的,本章则着重于构成最小阶实现的方法。
§3—1系统的标准形关于等价变换 等价变换的关系A PAPB PBC CP 11,,--===其中P 为坐标变换阵,即有x Px =。

《线性系统理论》作业参考答案1-1 证明:由矩阵úúúúúúûùêêêêêêëé----=--121000001000010a a a a A n n nL M O M M M L L L则A 的特征多项式为nn n n n n n n n n n n n n n n n n na a a a a a a a a a a a a a a a a A I +++==+--++--=--++--=+--=--------+-----L L L M O MM ML LL L M O M M M L L L L M O MMM L L L112114322111321121)1()1(00001001)1()1(000010001000010001l l l l l l ll l l l l l l l l ll 若i l 是A 的特征值,则00001000010001)(1112121=úúúúúúûùêêêêêêëé+++=úúúúúúûùêêêêêêëéúúúúúúûùêêêêêêëé+--=-----n n i n i n i i i in n ni i i i i a a a a a a A I L M M L M O M M M L L L l l l l l l l l l u l 这表明[]Tn ii i121-l l l L 是i l 所对应的特征向量。
《线性系统理论》大作业报告引言:研究线性定常连续系统状态方程的解时,求解状态方程是进行动态系统分析与综合的基础,是进行定量分析的主要方法。
而线性定常连续系统状态方程的解由两个部分相加组成。
第一个部分是由初始状态所引起的自由运动,即状态的零输入响;第二个部分是由输入所引起的系统强迫运动,其值为输入函数与矩阵指数函数的卷积,即状态的零状态响应。
由于这两部分中都包含有状态转移矩阵,因此状态转移矩阵的计算是线性定常连续系统状态方程求解的关键。
本文先总结了的计算方法,并运用matlab命令求解证明各方法的正确性及给出相应的零输入响应仿真结果。
然后推导了脉冲响应的公式,希望通过飞机模型的例子来研究其系统的脉冲响应。
最后推广研究了任意输入的零状态响应。
第一部分的计算方法及零输入响应的仿真证明一.的计算方法1.根据的定义直接计算定义式是一个无穷级数,故在计算中必须考虑级数的收敛条件和计算收敛速度问题。
类似于标量指数函数,对所有有限的常数矩阵A和有限的时间t来说,矩阵指数函数这个无穷级数都是收敛的。
显然用此方法计算一般不能写成封闭的解析形式,只能得到数值计算的结果。
2.变换A为约旦标准型因为任何都可经线性变换成为对角矩阵或约旦矩阵,因此下面将利用对角矩阵和约旦矩阵的矩阵指数函数计算的简便性质,通过线性变换将一般形式的系统矩阵变换成对角矩阵或约旦矩阵计算其矩阵指数函数。
对于矩阵A,若经过非奇异变换(相似变换)矩阵P作变换后,有则3. 利用拉氏反变换求已知齐次方程两边取拉氏变换即对上式两边取拉氏反变换得齐次微分方程的解:而由定义法求得的齐次微分方程的解为比较两式得4. 应用凯莱—哈密顿定理求(1)由凯莱—哈密顿定理,方阵A 满足其自身的特征方程,即()1110 0n n n fA A a A a A a I--=++++=故121210...n n n n n A a A a A a A a I ----=-----它是的线性组合。
二阶线性时不变系统0101()()()()()y t a y t a y t b f t b f t ''''++=+,在激励2()()t f t e U t -=作用下的全响应为23()(4)()t t t y t e e e U t ---=+-,而在激励2()2t t e δ--作用下的全响应为231()(35)()t t t y t e e e U t ---=+-。
设系统的初始状态不变。
1. 求01,a a ;2. 求系统的零输入响应()x y t 和单位冲激响应()h t ;3. 求01,b b 的值。
解答:1. 因激励2()()t f t e U t -=,故其全响应23()(4)()t t t y t e e e U t ---=+-中的强迫响应分量为24()t e U t -,自由分量为3()()t t e e U t ---,故知系统的特征根为121,3λλ=-=-,特征方程为(1)(3)0λλ++=,2430λλ++= 故得014,3a a ==。
2. 设2()()t f t e U t -=激励下系统全响应中的零输入响应为()x y t ,零状态响应为()f y t ,故有23()()()(4)()t t t x f y t y t y t e e e U t ---=+=+-, (1) 由于22()2[()]t t t e e U t δ--'-=,根据线性系统微分性有23()()(35)()t t t x f y t y t e e e U t ---'+=+- (2) 设系统的单位冲激响应为()h t ,则根据叠加性有()()2()f f y t h t y t '=-(3) (1)-(2),有23()()(434)()t t t x f y t y t e e e U t ---'-=-++ (4)设 23123()()()t t t f y t Ae A e A e U t ---=++ 故 23123123()(23)()()()t t t f y t Ae A e A e U t A A A t δ---'=---+++,代入(4)式,有23123()()t t t Ae A e A e U t ---+++23123123(23)()()()t t t Ae A e A e U t A A A t δ---++-++ =23(434)()t t t e e e U t ----++解得 1232,1,1A A A =-==,于是 23()(2)()t t t f y t e e e U t ---=-++ 由(1)式得,23()(32)()t t t x y t e e e U t ---=+-又由(3)式得 3()(2)()t t h t e e U t --=--3. 当()()f t t δ=时,此时系统的响应为3()(2)()t t h t e e U t --=--,代入原方程有 013()7()()()t t b t b t δδδδ''--=+得 013,7b b =-=-。
32下信号与线性系统第一、二章练习题一.选择题:1.*()t A e t ε的卷积积分为( A ) A.不存在 B.()t Ae t ε- C.()t Ae t εD.()At e t ε2.若连续LTI 系统的初始状态不为零,当激励信号增大一倍时,其零状态响应( A ) A.增大一倍B.保持不变C.增大,但不能确定增大倍数D.增大两倍3.式0(2)sin (3)t t dt δω∞--⎰的值是( B )A.cos ω-B.sin ω-C.cos ωD.sin ω4.已知 f (t )的傅里叶变换为()F j ω,则函数()()()y t f t t a δ=-的傅里叶变换()Y j ω为( B ) A.()ja F j e ωω- B.()ja f a e ω- C.()ja F j e ωωD.()ja f a e ω5.已知信号f (t )如题7图所示,则其傅里叶变换F (j ω)为( B )A.1cos 2ωτ B.2cos ωτ C.1sin 2ωτ D.2sin ωτ6.下列各表达式正确的是( B ) A .(t -1)δ(t )=δ(t ) B .(1-t )δ(1-t )=0 C .⎰∞∞-=+)()()1(t dt t t δδD .⎰∞∞-=++1)1()1(dt t t δ7.信号f (-2t +4)是下列哪种运算的结果( ) A .f (-2t )右移2 B .f (-2t )左移2 C .f (-2t )右移4D .f (-2t )左移218.设某线性电路的单位冲激响应为h (t ),f (t )为输入,则⎰-=t d h t f t y 0)()()(τττ是系统的( ) A .自由响应 B .零输入响应 C .完全响应D .零状态响应9.信号)(2t e t j δ'的傅里叶变换为( )A .j (ω-2)B .j (ω+2)C .2+j ωD .-2+j ω10.已知f (t )的傅里叶变换为)(ωj F ,则f (1-t )的傅里叶变换为( ) A .ωωj e j F )(-- B .ωωj e j F -)( C .ωωj e j F --)(D .ωωj e j F )(-11.若周期信号f (t )为对称于原点的奇函数,则其傅里叶级数展开式的结构特点是( ) A .只有正弦项 B .只有余弦项 C .有直流分量 D .只含偶次谐波 12.设f (t )为系统输入,y (t )为系统输出,则下列关系式中为线性时不变系统的是( ) A.y (t )=x (t )f (t ) B.y (t )=tf (t ) C.)()()()(22t f t f dt d t y t y dtd +=+D.y (t )=f (2t )13.式⎰∞∞-⎪⎭⎫⎝⎛-+6)sin (πδt t t dt 的值是( )A.6πB.6π-1 C.6π-21 D.6π+21 14.已知f (t )的傅里叶变换为F (j ω),y (t )=f ⎪⎭⎫⎝⎛+b a t ,其中a 、b 为常数,则Y (j ω)为( )A.|a |F (j ω)ωjab eB.|a |F (ja ω)ωjab e -C.||1a F (j aω)ωa b j e D.||1a F ⎪⎭⎫ ⎝⎛a j ωωa bj e - 15.已知信号f (t )如题7图所示,其傅里叶变换为F (j ω),则F (0)为( ) A.2 B.π C.π21 D.416.积分f (t )=⎰-11(2t 2+1)δ(t -2)dt 的结果为( )A.1B.3C.9D.017.设激励为f 1(t )、f 2(t )时系统产生的响应分别为y l (t )、y 2(t ),并设a 、b 为任意实常数,若系统具有如下性质:af 1(t )+bf 2(t )↔ay l (t )+by 2(t ),则系统为( )A.线性系统B.因果系统C.非线性系统D.时不变系统18.周期信号的频谱特点是( ) A.周期连续谱 B.周期离散谱 C.非周期连续谱D.非周期离散谱19.卷积积分f (t -t 1)*δ(t -t 2)的结果为( ) A.f (t -t 1-t 2) B. δ(t -t 1-t 2) C.f (t +t 1+t 2)D. δ(t +t l +t 2)20.信号f (t )的带宽为20KHz ,则信号f (2t )的带宽为( ) A.20KHz B.40KHzC.10KHzD.30KHz21.已知信号f (t )的傅里叶变换为F ( j ω),则t dt t df )(的傅里叶变换为( )A.ωωωωd j dF j F )(-)( B.ωωωωd j dF j F )()(+- C.ωωωωd j dF j F )(-)(- D.ωωωωd j dF j F )()(+ 22.已知信号f(t)的波形如题3图所示,则=dt )t (df ( ) A.0B.)2t ()t (-δ-δC.)2t (2)t (2-δ+δD.)2t (2)t (2-δ-δ23.离散信号f(n+i),(i ≥0),表示( ) A.信号f (n)的左移序i B.信号f (n)的右移序i C.信号f (n)的折叠 D.信号f (n)的折叠再移序i24.下列表达式中错误的是( ) A.)t ()t (-δ=δ B.)t t ()t t (00-δ=-δ C.)t ()t (δ-=δD.)t (21)t 2(δ=-δ 25.信号f 1(t)、f 2(t)的波形如题6图所示,则f(t)=f 1(t)*f 2(t)的表达式为( ) A.)1t ()1t (-ε-+ε B.)2t ()2t (-ε-+ε C.)1t ()1t (+ε--ε D.)2t ()2t (+ε--ε 26.周期信号f(t)=-f(t 2T±),(T —周期),则其傅里叶级数展开式的结构特点是( ) A.只有正弦项B.只有余弦项C.只含偶次谐波D.只含奇次谐波 27.已知f(t)↔F(j ω),则f(2t+4)的傅里叶变换为( )A.ωω2j e )2j (F 21 B.2j e )2j (F 21ωω C.ωω2j e )2j (F 2D.2j e )j (F 2ωω二、填空题:1.连续信号是指________的信号,通常表示为f (t )。
举一个线性系统的例子,分析其输入输出之间的线性关系,并给出仿真结果,进一步分析零输入响应与零状态响应。
解:如图1所示,一个质量为m 的滑块通过劲度系数为2k 的弹簧连在墙上,忽略滑块与地面之间的库伦摩擦,只考虑粘滞摩擦,粘滞摩擦系数为1k 。
该系统可以视为一个线性系统。
图1系统组成图 对于系统应用牛顿第二定律可得
y k y k u my 2'1''--=(式1)
其中0y 是滑块的初始位置。
对式1进行拉氏变换可得
)()()()(212s Y k s sY k s U s Y ms --=
变形得
)(1)(2
12s U k s k ms s Y ++= 取2,1,121===k k m ,则传递函数21)(2++=
s s s G 。
线性系统具有叠加性和齐次性,可表示为
021*******),()(),()()
()(t t t y t y t t t u t u t x t x ≥+→⎭⎬⎫≥++(叠加性) 010101),(),()(t t t y t t t u t x ≥→⎭
⎬⎫≥ααα(齐次性) 对此系统仿真得到的结果如图2、图3所示。
由图像可以看出该系统满足上述叠加性和齐次性描述,因此此系统为线性系统。
图2叠加性仿真结果
图3齐次性仿真结果
由于该系统是线性系统,因此该系统的响应可以由零输入响应与零状态响应的和来表示,即
全响应= 零输入响应+ 零状态响应
图4验证了该系统也满足上式
图4全响应、零输入响应与零状态响应仿真图。