线性系统大作业1
- 格式:doc
- 大小:1.42 MB
- 文档页数:19
第一章 背景1.1自相关函数自相关函数是信号在时域中特性的平均度量,它用来描述信号在一个时刻的取值与另一时刻取值的依赖关系,对于离散信号r 长度为N ,记为{r(k),k=0,1,2,…,N-1}。
该信号的自相关函数为101R()[()()]N i r i i N ττ-==+∑()()r i r i N ττ+=+-伪随机信号在每个采样点k 信号值为-a 或a ,其自相关函数为自相关函数就是信号x(t)和它的时移信号()x t τ+乘积的平均值,它是时移变量τ的函数。
自相关函数具有如下主要性质:(1)自相关函数为偶函数,xy R ()τ=xy R ()τ-,其图形对称于纵轴。
因此,不论时移方向是导前还是滞后(τ为正或负),函数值不变。
(2)当τ=0时,自相关函数具有最大值,且等于信号的均方值,即(3)周期信号的自相关函数仍为同频率的周期信号。
自相关函数的典型应用包括:检测淹没在随机噪声中的周期信号。
由于周期信号的自相关函数仍是周期性的,而随机噪声信号随着延迟增加,它的自相关函数将减到零。
因此在一定延迟时间后,被干扰信号的自相关函数中就只保留了周期信号的信息,而排除了随机信号的干扰。
1.2互相关函数互相关函数,表示的是两个时间序列之间和同一个时间序列在任意两个不同时刻的取值之间的相关程度,即互相关函数是描述随机信号x(t),y(t)在任意两个不同时刻t1,t2的取值之间的相关程度。
随机信号x(t)和y(t)的互相关函数xy R ()τ定义为xy R ()[()()]n m x n m y n +∞=-∞=-∑系统脉冲响应的测定。
在随机激励试验中,假如以随机白噪声作为试验信号输入被测系统,则输入信号与输出信号的互相关函数R() 就是被测系统的脉冲xy响应。
这种测量方法的优点可以在系统正常工作过程中测量。
测量时,其他信号都与试验信号无关,因而对互相关函数没有影响,不影响脉冲响应的测量。
第二章 基于Hankel 阵的实现2.1 Markov 系数概述对于严格真有理分式111111...()...n n nnn n nb s b s b G s s a s a s a ----+++=+++ 用多项式除法按指数级数展开12()(0)+(1)(2)...g s h h s h s --=++∵传递函数是严格真有理分式 ∴(0)=0hG(s)按Markov 矩阵展开成1(1)(1)1G(s)=C[SI-A]()()i i i i i B CA s G s h i s ∞--+=∞-+==⇒=∑∑我们把{(1),(2),(3)...}h h h 称为Markov 系数。

线性系统作业
1.设计一个仿真实验,说明线性性质
考虑一个线性系统y=0.5*u ,系统仿真如图1
图 1
输入为单位阶跃信号,输出如图2
图 2
验证其齐次性:系统仿真如图3
图 3
输入为单位阶跃信号的 4 倍,输出如图 4
图 4
验证其叠加性,系统仿真如图 5
图 5
输入为两个单位输入信号,输出如图 6
图 6
从图 4、图 6 中我们可以看出线性系统的齐次性和叠加性
2. 构造两个零状态等价系统,其稳定性不同,用仿真说明,在
初始条件相同时,系统输出可能不同。
m
m 先构造两个零状态等价系统,可知道其 D= B C A B ( ⋯) D , CA
m=0,1,2,
0, 1 1 1, 3
1
取 A 1 , B ,C 0,1 , D 0 则得 A 1, , B , C 0,1 , D 1, 0 2 0
0,1
x 1
0,1 x
系统 1 为 x
1u , y
1,0
1,3
x 1
0,1 x
系统 2 为 x
2u , y
1,0
用 MATLAB 仿真系统如图 7
图 7
当输入为正弦信号,两个系统的初始状态均为0 时,输入如图 8
图 8
1 时,输入如图 9当输入为正弦信号,两个系统的初始状态均为
图9
从图 8、图 9 上可以看出在初始条件相同时的两个零状态等价系统,初始状态为0 时系统输出几乎相同,初始状态为 1 时系统输出不同。
目录题目一 (2)(一)状态反馈加积分器校正的输出反馈系统设计 (2)(1)建立被控对象的状态空间模型,并判断系统性质 (2)(2)状态反馈增益矩阵和积分增益常数的设计 (4)(3)全维观测器设计 (6)(4)如何在闭环调速系统中增加限流环节 (8)(二)二次型最优全状态反馈控制和按负载扰动前馈补偿的复合控制系统设计 (8)(1)线性二次型最优全状态反馈设计 (8)(2)降维观测器设计 (13)题目二 (15)(1)判断系统是否存在最优控制律 (15)(2)非零给定点的最优控制设计和仿真分析 (16)(3)权矩阵的各权值对动态性能影响分析 (17)题目一(一)状态反馈加积分器校正的输出反馈系统设计 (1)建立被控对象的状态空间模型,并判断系统性质1)画出与题目对应的模拟结构图,如图1所示:图1原始系统结构图取状态变量为1x =n ,2x =d I ,3x =d u ,控制输入u=c u1222212333375375111T Le la la la s s s C x x T GD GD C x x x x RT T RT K xx u T T ⎧=-⎪⎪⎪=--+⎨⎪⎪=-+⎪⎩将已知参数代人并设输出y=n=1x ,得被控对象的状态空间表达式为L x Ax Bu ET y Cx=++=其中,237500039.768011=-3.696-17.85727.05600-588.235100T ela lala s C GD C A RT T RT T ⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥-⎢⎥⎣⎦,000=023529.41s s B K T ⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦,2375-30.4880=000GD E ⎡⎤-⎢⎥⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦,[]100C = 2)检查被控系统的结构性质判断系统能控性、能观性、稳定性 程序如下:A=[0 39.768 0;-3.696 -17.857 27.056;0 0 -588.235]; B=[0;0;23529.41];C=[1 0 0]; Qc=ctrb(A,B); Qo=obsv(A,C); L=length(A); if rank(Qc)==Ldisp('系统是状态完全能控'); elsedisp('系统是状态不完全能控'); endif rank(Qo)==Ldisp('系统是状态完全能观'); elsedisp('系统是状态不完全能观'); enddisp(eig(A))%利用A 的特征值判断系统稳定性 运行结果:系统是状态完全能控 系统是状态完全能观 1.0e+02 *-0.0893 + 0.0820i -0.0893 - 0.0820i -5.8823 + 0.0000i由于矩阵A 全部特征值均具有负实部,因此系统渐近稳定。
P130T10系统的状态方程为X(t )AX(t )Bu(t )=+其中, ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=10,0010B A 试将它离散化,并求出当输入和初始条件分别为⎥⎦⎤⎢⎣⎡==01)0(),(1)(x t t u 时方程在采样时刻的近似解了。
解 取采样周期T=0.05秒,编写和执行以下的m-文件:>> A=[0 1;0 0];>> B=[0;1];>> [G ,H]=c2d(A,B,0.05)得到G =1.0000 0.05000 1.0000H =0.00130.0500因此,所求的离散化状态空间模型是)(0500.00013.00000.100500.00000.1)1(t u k x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=+用以下Matlab 程序求离散后状态方程的解,>> syms s t x0 x tao phi phi0;>> G=[1.0000 0.0500;0 1.0000];I=[1 0;0 1];H=[0.0013 0.0500];>> syms s t x0 x tao phi phi0;>> G=[1.0000 0.0500;0 1.0000];I=[1 0;0 1];H=[0.0013;0.0500];>> E=s*I-G;C=det(E);D=collect(inv(E));>> phi0=ilaplace(D);x0=[1;0];x1=phi0*x0;>> phi=subs(phi0,'t',(t-tao));>> F=phi*H*1;x2=int(F,tao,0,t);>> x=collect(x1+x2)得到x =2497/2500*exp(t)+3/2500+1/400*t*exp(t)-1/20+1/20*exp(t)这表示⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-++=t t t e te e t x 20120140012500325002497)( P274T16设有n 阶系统()(1)110()n n n x a x a xa x u t --++++= 其中u(t)是控制函数,试写出使泛函()102t m t J x c u d t⎡⎤=-+⎣⎦⎰ 取极小值的欧拉方程。
线性系统作业结果
控制科学与工程王珠2011200811
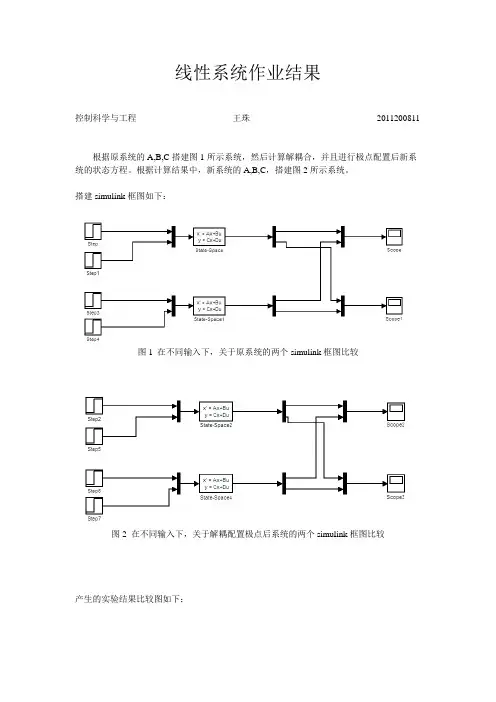
根据原系统的A,B,C搭建图1所示系统,然后计算解耦合,并且进行极点配置后新系统的状态方程。
根据计算结果中,新系统的A,B,C,搭建图2所示系统。
搭建simulink框图如下:
图1 在不同输入下,关于原系统的两个simulink框图比较
图2 在不同输入下,关于解耦配置极点后系统的两个simulink框图比较
产生的实验结果比较图如下:
图3 原系统u2不变,u1阶跃幅值变化,引起y1,y2的变化
图4 解耦配置极点后的系统u2不变,u1阶跃幅值变化,引起y1,y2的变化
图5 解耦配置极点后的系统u1不变,u2阶跃幅值变化,引起y1,y2的变化
结果分析:
当原系统u2不变,u1阶跃幅值变化,u1的变化可以引起系统输出的y1,y2同时变化,并且y1发散,说明系统具有耦合性。
当对原系统进行解耦合,并且进行极点配置后,系统不仅能消除耦合,而且,极点配置可以使系统稳定。
从图中的结果可以看出:u2不变,u1阶跃幅值的改变仅影响y1发生改变,u1的变化对y2没有影响;u1不变,u2阶跃幅值的改变仅影响y2发生改变,u2的变化对y1没有影响。
结果证实:系统解耦合了,并且从图4,图5还可看出,经过极点配置后,系统的输出
最终稳定下来。

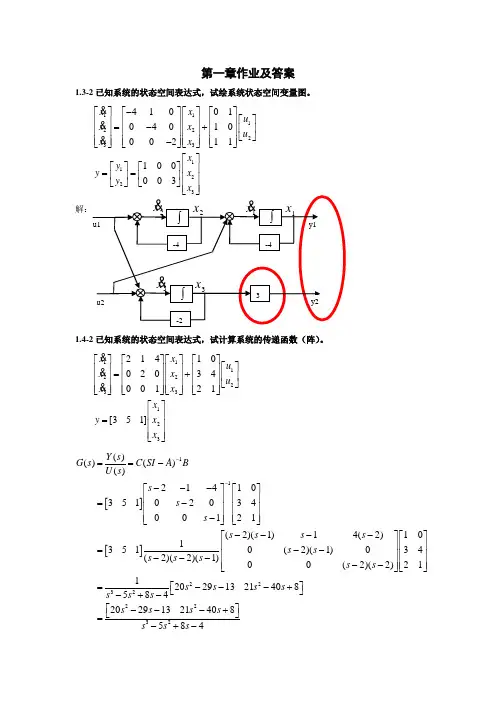
第一章作业及答案1.3-2已知系统的状态空间表达式,试绘系统状态空间变量图。
11122233112241001040100021110003xx u x x u x x x y y x y -⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1.4-2已知系统的状态空间表达式,试计算系统的传递函数(阵)。
11122233123214100203400121[351]xx u x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦[][]112232()()()()21410351020340121(2)(1)14(2)1013510(2)(1)034(2)(2)(1)00(2)(2)21120291321408584Y s G s C SI A B U s s s s s s s s s s s s s s s s s s s s s s --==----⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦----⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥---⎢⎥⎢⎥--⎣⎦⎣⎦⎡⎤=---+⎣⎦-+-223220291321408584s s s s s s s ⎡⎤---+⎣⎦=-+-注意:也可写做[][][]23220212940138584s s s s s +--+--+-1.5-1已知系统传递函数,试用传递函数求出系统的状态空间模型。
2()35()()(3)(2)Y s s G s U s s s +==++解:通过赋予研究对象不同的内部结构可将传递函数转换成不同的状态空间模型。
(1)求出上述传递函数能控标准型表示由已知条件可知该传递函数为严格真分式,且该系统为单入单出(SISO )三阶系统。
根据公式10111()...(),(1)()...mm mn n nY s b s b s b G s n m U s s a sa --+++===++++其中,可将传递函数写为223235035()(3)(2)82118s s s G s s s s s s +++==+++++其中,123012a 8,21,18,0,3,5a a b b b ======。


《线性系统理论》作业参考答案1-1 证明:由矩阵úúúúúúûùêêêêêêëé----=--121000001000010a a a a A n n nL M O M M M L L L则A 的特征多项式为nn n n n n n n n n n n n n n n n n na a a a a a a a a a a a a a a a a A I +++==+--++--=--++--=+--=--------+-----L L L M O MM ML LL L M O M M M L L L L M O MMM L L L112114322111321121)1()1(00001001)1()1(000010001000010001l l l l l l ll l l l l l l l l ll 若i l 是A 的特征值,则00001000010001)(1112121=úúúúúúûùêêêêêêëé+++=úúúúúúûùêêêêêêëéúúúúúúûùêêêêêêëé+--=-----n n i n i n i i i in n ni i i i i a a a a a a A I L M M L M O M M M L L L l l l l l l l l l u l 这表明[]Tn ii i121-l l l L 是i l 所对应的特征向量。
一、给定多项式矩阵如下:22121()12s s s s D s s s ⎡⎤⎢⎥⎢⎥⎣⎦++++=++ 1. 计算矩阵的行次数,判断系统是否行既约?2. 计算矩阵的列次数,判断系统是否列既约?3. 寻找单模矩阵,将多项式矩阵()D s 化为史密斯型。
方法1、 进行初等变换成二、设系统的传递函数矩阵为右MFD 1()()N s D s -,其中:210()21s D s s s s ⎡⎤⎢⎥⎢⎥⎣⎦-=+-+,()11N s s s ⎡⎤⎣⎦=-+ 试判断{}(),()N s D s 是否右互质;如果不是右互质,试通过初等运算找出其最大右公因子。
最大右公因子进行列变换可得()0R s ⎡⎤⎢⎥⎣⎦三、给定()G s 的一个左MFD 为:121010()1121s s G s s s s -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦-+=+-+ 试判断这个MFD 是否是最小阶的;如果不是,求出其最小阶MFD 。
四、确定下列传递函数矩阵的一个不可简约左MFD:2110()1022s ss G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+=+++五、给定系统的传递函数矩阵为223(1)(2)(1)(2)()31(1)(2)(2)s s s s s s G s s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+++++=+++++ 试计算出相应的评价值,并写出其史密斯--麦克米伦型。
六、给定传递函数矩阵如下:22221156()125343s s s s s G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+-++=++++ 试定出其零、极点,并计算出其结构指数。
七、给定系统的传递函数矩阵如下:22211154()143712s s s s G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦+-++=++++ 试求出一个控制器型实现。
八、确定下列传递函数矩阵()G s 的一个不可简约的PMD22141()14332s s s s G s s s s s ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦++-=++++九、给定系统的传递函数矩阵如下:12243011()22121s s s s G s s s s s -⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦++-+=+++试设计一个状态反馈K,使得状态反馈系数的极点为:12λ*=-, 23λ*=-, 4,542j λ*=-±。
《线性系统理论》大作业报告引言:研究线性定常连续系统状态方程的解时,求解状态方程是进行动态系统分析与综合的基础,是进行定量分析的主要方法。
而线性定常连续系统状态方程的解由两个部分相加组成。
第一个部分是由初始状态所引起的自由运动,即状态的零输入响;第二个部分是由输入所引起的系统强迫运动,其值为输入函数与矩阵指数函数的卷积,即状态的零状态响应。
由于这两部分中都包含有状态转移矩阵,因此状态转移矩阵的计算是线性定常连续系统状态方程求解的关键。
本文先总结了的计算方法,并运用matlab命令求解证明各方法的正确性及给出相应的零输入响应仿真结果。
然后推导了脉冲响应的公式,希望通过飞机模型的例子来研究其系统的脉冲响应。
最后推广研究了任意输入的零状态响应。
第一部分的计算方法及零输入响应的仿真证明一.的计算方法1.根据的定义直接计算定义式是一个无穷级数,故在计算中必须考虑级数的收敛条件和计算收敛速度问题。
类似于标量指数函数,对所有有限的常数矩阵A和有限的时间t来说,矩阵指数函数这个无穷级数都是收敛的。
显然用此方法计算一般不能写成封闭的解析形式,只能得到数值计算的结果。
2.变换A为约旦标准型因为任何都可经线性变换成为对角矩阵或约旦矩阵,因此下面将利用对角矩阵和约旦矩阵的矩阵指数函数计算的简便性质,通过线性变换将一般形式的系统矩阵变换成对角矩阵或约旦矩阵计算其矩阵指数函数。
对于矩阵A,若经过非奇异变换(相似变换)矩阵P作变换后,有则3. 利用拉氏反变换求已知齐次方程两边取拉氏变换即对上式两边取拉氏反变换得齐次微分方程的解:而由定义法求得的齐次微分方程的解为比较两式得4. 应用凯莱—哈密顿定理求(1)由凯莱—哈密顿定理,方阵A 满足其自身的特征方程,即()1110 0n n n fA A a A a A a I--=++++=故121210...n n n n n A a A a A a A a I ----=-----它是的线性组合。
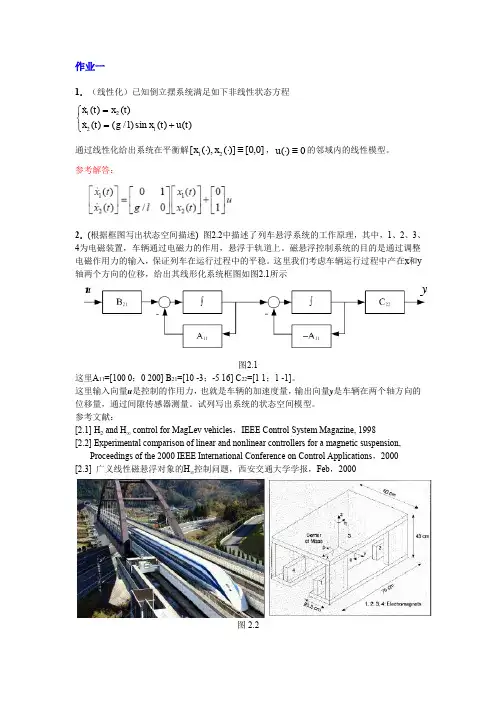
1、在造纸流程中,投料箱应该把纸浆流变成2cm 的射流,并均匀喷洒在网状传送带上。
为此,要精确控制喷射速度和传送速度之间的比例关系。
投料箱内的压力是需要控制的主要变量,它决定了纸浆的喷射速度。
投料箱内的总压力是纸浆液压和另外灌注的气压之和。
由压力控制的投料箱是个耦合系统,因此,我们很难用手工方法保证纸张的质量。
在特定的工作点上,将投料箱线性化,可以得到下面的状态空间模型:ẋ = [−0.8+0.02−0.020] x+[0.0510.0010] u y =[x 1 , x 2]其中,系统的状态变量x1=液面高度,x2=压力,系统的控制变量u1=纸浆流量u2=气压阀门的开启量。
在上述条件下,试设计合适的状态变量反馈控制器,使系统具有实特征根,且有一个根大于5解:下面是对此设计的MATLAB 程序实现:>> A=[-0.8 0.02;-0.02 0];>> B=[0.05 1;0.001,0];>> r=rank(ctrb(A,B))r =2>> C=[1 1];>> P=[1 6];>> K=place(A,B,P)K =1.0e+003 *-0.0200 -6.0000-0.0008 0.30002、描述恒速制导导弹的运动方程为:ẋ = [ 01000−0.1−0.50000.500000 010000.51000]x + [ 01000] uy =[ 0 0 0 1 0 ] x(a) 运用ctrb 函数计算系统的能控型矩阵,并验证系统是不可控的;(b) 计算从u 到Y 的传递函数,并消去传递函数中的分子和分母公因式,由此可以得到能控的状态空间模型。
在消去了公因子之后,请用tf2ss 函数确定新的状态变量模型;(c) 证明(b)中得到的状态变量模型是能控的;(d) 说明恒速制导导弹是否稳定?(e) 讨论状态变量模型的能控性和复杂性的关系(假设用状态变量的数目来度量复杂性)解程序如下:clearA=input('请输入系统矩阵:');B=input('请输入输入矩阵:');C=input('请输入输出矩阵:');Qc1=ctrb(A,B)N1=size(A);n1=N1(1) %判断状态方程维数rc1=rank(Qc1)if rc1==n1disp('系统可控')elseif rc1<n1disp('系统不可控')endsyms sI=eye(n1);Q=inv(s*I-A);sys=collect(C*Q*B) %求解原状态方程的频域传递函数并化简num=[500 250 50];den=[1 0 0];[A1 B1 C1 D1]=tf2ss(num,den)Qc2=ctrb(A1,B1)N2=size(A1);n2=N2(1) %判断状态方程维数rc2=rank(Qc2)if rc2==n2disp('系统可控')elseif rc2<n2disp('系统不可控')endd1=eig(A)'d2=eig(A1)'flag1=0;flag2=0;for i=1:n1if real(d1(i))>0flag1=1;endendif flag1==1disp('原系统不稳定')elsedisp('原系统稳定')endfor j=1:n2if real(d2(j))>0flag2=1;endendif flag2==1disp('新系统不稳定')elsedisp('新系统稳定')end运行结果:请输入系统矩阵:[0 1 0 0 0;-0.1 -0.5 0 0 0;0.5 0 0 0 0;0 0 10 0 0;0.5 1 0 0 0]请输入输入矩阵:[0;1;0;0;0]请输入输出矩阵:[0 0 0 1 0]Qc1 =0 1.0000 -0.5000 0.1500 -0.02501.0000 -0.5000 0.1500 -0.0250 -0.00250 0 0.5000 -0.2500 0.07500 0 0 5.0000 -2.50000 1.0000 0 -0.1000 0.0500n1 =5rc1 =4系统不可控sys =50/s^2/(10*s^2+5*s+1)A1 =0 01 0B1 =1C1 =250 50D1 =500Qc2 =1 00 1n2 =2rc2 =2系统可控d1 =0 0 0 -0.2500 - 0.1936i -0.2500 + 0.1936id2 =0 0原系统稳定新系统稳定分析:由上述分析结果可知原系统和新系统均稳定,而实际上由系统的极点可知,原系统是稳定的,新系统实际上处于临界稳定状态也可认为是不稳定的;若以状态变量的数目来度量复杂性,可知系统的完全可控性与复杂性存在类似反比的关系,及复杂性越高系统完全可控的难度越大,复杂性越低系统完全可控的难度越低。
线性系统作业设计⼀:⼀、状态反馈与积分器校正设计①根据结构框图和所给数据,先求出系统状态空间表达式代码如下:%建⽴状态⽅程,其中 x1=ud,x2=Id,x3=n,u=uc Ts=0.0017;Tla=0.048;Ce=0.1377;Ks=40;%参数数值R=0.78;P=10.1;CT=1.3149;A=[-1/Ts 0 0;1/(R*Tla) -1/Tla -Ce/(R*Tla);0 375*CT/P 0] B=[Ks/Ts;0;0] C=[0 0 1] D=0求解出的结果为:A= 0 48.8205 0 3.6779- 20.8333- 26.7094 0 0 588.2353- ,??=0023529B ,[]100=C ,0=D②检查被控系统是否能控因为状态反馈实现的前提是系统能控,所以我们在设计前必须先进⾏判断。
代码如下:%判断系统是否完全能控Qc=ctrb(A,B);if rank(Qc)==length(A) str='系统是状态完全能控' elsestr='系统是状态不完全能控' end得到结果为:str =系统是状态完全能控,故可以进⾏状态反馈设计③进⾏反馈控制系统的设计状态反馈加积分器校正的输出反馈系统,反馈控制律为w k x k u *2*1+-=,其中[]1312111k k k k =。
则设计后的新系统??--='02*1*C k B k B A A .求新系统的特征多项式'det )(A sI s p -=. 求解多项式代码如下:A'=[-588.2353-23529*k11 -23529*k12 -23529*k13 23529*k2;26.7094 -20.8333 -3.6779 0;0 48.8205 0 0;0 0 -1 0]%根据已知数据较易求得aa=sym(A') poly(aa,'s')得到计算结果为p(s)= s^4 + (23529*k11 85718785000095935/140737488355328)*s^3 + ((68987647192765231095*k11)/140737488355328 + (176891674764002194755*k12)/281474976710656 + 601292593358158433508566018029941453/48357032784585166988247040000000)*s^2 +((84495893978331*k11)/20000000 +(3454376003126387659614591*k13)/112589990684262400 + 1858116894196552875337977/17592186044416000000)*s + (3454376003126387659614591*k2)/112589990684262400=s^4+(23529*k11+613.24)*s^3+(588225*k11+1400535.49*k12+14852.40)*s^2+(3447486.34*k11+25330505.04*k13+86188.67)*s+25330505.04*k2由于最⼤超调量%10021?=--ζζπeM p ,当振幅在%2±范围内时调节时间ns t ζω4=,其中Tn 1=ω为系统⾃然振荡⾓频率。