线性系统理论作业
- 格式:docx
- 大小:275.32 KB
- 文档页数:14
目录题目一 (2)(一)状态反馈加积分器校正的输出反馈系统设计 (2)(1)建立被控对象的状态空间模型,并判断系统性质 (2)(2)状态反馈增益矩阵和积分增益常数的设计 (4)(3)全维观测器设计 (6)(4)如何在闭环调速系统中增加限流环节 (8)(二)二次型最优全状态反馈控制和按负载扰动前馈补偿的复合控制系统设计 (8)(1)线性二次型最优全状态反馈设计 (8)(2)降维观测器设计 (13)题目二 (15)(1)判断系统是否存在最优控制律 (15)(2)非零给定点的最优控制设计和仿真分析 (16)(3)权矩阵的各权值对动态性能影响分析 (17)题目一(一)状态反馈加积分器校正的输出反馈系统设计 (1)建立被控对象的状态空间模型,并判断系统性质1)画出与题目对应的模拟结构图,如图1所示:图1原始系统结构图取状态变量为1x =n ,2x =d I ,3x =d u ,控制输入u=c u1222212333375375111T Le la la la s s s C x x T GD GD C x x x x RT T RT K xx u T T ⎧=-⎪⎪⎪=--+⎨⎪⎪=-+⎪⎩将已知参数代人并设输出y=n=1x ,得被控对象的状态空间表达式为L x Ax Bu ET y Cx=++=其中,237500039.768011=-3.696-17.85727.05600-588.235100T ela lala s C GD C A RT T RT T ⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥-⎢⎥⎣⎦,000=023529.41s s B K T ⎡⎤⎢⎥⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦,2375-30.4880=000GD E ⎡⎤-⎢⎥⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦,[]100C = 2)检查被控系统的结构性质判断系统能控性、能观性、稳定性 程序如下:A=[0 39.768 0;-3.696 -17.857 27.056;0 0 -588.235]; B=[0;0;23529.41];C=[1 0 0]; Qc=ctrb(A,B); Qo=obsv(A,C); L=length(A); if rank(Qc)==Ldisp('系统是状态完全能控'); elsedisp('系统是状态不完全能控'); endif rank(Qo)==Ldisp('系统是状态完全能观'); elsedisp('系统是状态不完全能观'); enddisp(eig(A))%利用A 的特征值判断系统稳定性 运行结果:系统是状态完全能控 系统是状态完全能观 1.0e+02 *-0.0893 + 0.0820i -0.0893 - 0.0820i -5.8823 + 0.0000i由于矩阵A 全部特征值均具有负实部,因此系统渐近稳定。

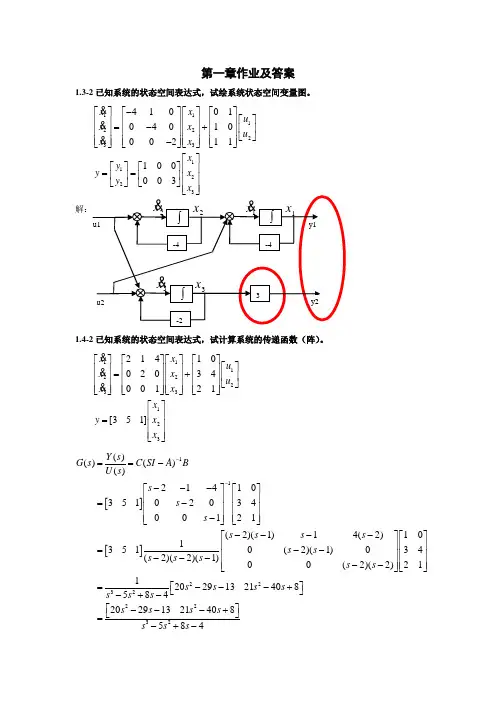
第一章作业及答案1.3-2已知系统的状态空间表达式,试绘系统状态空间变量图。
11122233112241001040100021110003xx u x x u x x x y y x y -⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1.4-2已知系统的状态空间表达式,试计算系统的传递函数(阵)。
11122233123214100203400121[351]xx u x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦[][]112232()()()()21410351020340121(2)(1)14(2)1013510(2)(1)034(2)(2)(1)00(2)(2)21120291321408584Y s G s C SI A B U s s s s s s s s s s s s s s s s s s s s s s --==----⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦----⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥---⎢⎥⎢⎥--⎣⎦⎣⎦⎡⎤=---+⎣⎦-+-223220291321408584s s s s s s s ⎡⎤---+⎣⎦=-+-注意:也可写做[][][]23220212940138584s s s s s +--+--+-1.5-1已知系统传递函数,试用传递函数求出系统的状态空间模型。
2()35()()(3)(2)Y s s G s U s s s +==++解:通过赋予研究对象不同的内部结构可将传递函数转换成不同的状态空间模型。
(1)求出上述传递函数能控标准型表示由已知条件可知该传递函数为严格真分式,且该系统为单入单出(SISO )三阶系统。
根据公式10111()...(),(1)()...mm mn n nY s b s b s b G s n m U s s a sa --+++===++++其中,可将传递函数写为223235035()(3)(2)82118s s s G s s s s s s +++==+++++其中,123012a 8,21,18,0,3,5a a b b b ======。



《线性系统理论》作业参考答案1-1 证明:由矩阵úúúúúúûùêêêêêêëé----=--121000001000010a a a a A n n nL M O M M M L L L则A 的特征多项式为nn n n n n n n n n n n n n n n n n na a a a a a a a a a a a a a a a a A I +++==+--++--=--++--=+--=--------+-----L L L M O MM ML LL L M O M M M L L L L M O MMM L L L112114322111321121)1()1(00001001)1()1(000010001000010001l l l l l l ll l l l l l l l l ll 若i l 是A 的特征值,则00001000010001)(1112121=úúúúúúûùêêêêêêëé+++=úúúúúúûùêêêêêêëéúúúúúúûùêêêêêêëé+--=-----n n i n i n i i i in n ni i i i i a a a a a a A I L M M L M O M M M L L L l l l l l l l l l u l 这表明[]Tn ii i121-l l l L 是i l 所对应的特征向量。
分数: ___________任课教师签字:___________ 华北电力大学研究生结课作业学年学期:2014-2015学年第一学期课程名称:线性系统理论学生姓名:学号:提交时间:2014年11月27日目录1.绪论 (1)2.球杆系统分析与建模 (1)2.1球杆模型简介 (1)2.2拉格朗日法建模 (1)2.3拉格朗日模型线性化及状态空间表达式求取 (4)3. 系统稳定性分析 (5)3.1有初始状态下求取系统响应曲线 (6)3.3稳定性判断并求取零极点分布图 (7)4.系统能控性判别 (8)4.1代数判据 (8)4.2模态判据 (8)4.3可控性与可稳定性 (10)5.系统极点配置 (10)5.1极点配置方法 (10)5.1.1状态反馈原理 (11)5.1.2输出反馈原理 (11)5.1.3PID配置极点原理 (12)5.1.4三种反馈对比 (12)5.2.用状态反馈进行极点配置 (12)6.可观性分析及带状态反馈的状态观测器的设计 (16)6.1能观性分析 (16)6.1.1代数判据 (16)6.1.2模态判据 (16)6.3全维观测器原理 (17)6.4全维状态观测器结构 (17)6.5全维状态观测器设计 (18)6.6全维状态观测器Simulink仿真 (18)6.7全维状态观测器在干扰下的性能研究 (20)7.总结 (22)1.绪论球杆系统是控制理论中很经典的一个模型,通常用来检验控制策略的效果,并且很多实际系统都可以近似抽象为球杆模型,因此,对球杆系统的研究很有意义,本文从球杆模型的拉格朗日法建模入手,对球杆系统稳定性,能控能观性等控制特性进行分析。
2.球杆系统分析与建模2.1球杆模型简介球杆系统由底座,直流伺服电机,光滑导轨,小球等组成,导轨在伺服电机的带动下转动,小球在自身重力的作用下沿着光滑的金属导轨自由滚动,球杆系统简图如下,其中x 是小球在导轨上相对于导轨中心的位移量,以导轨左侧为正,α是导轨相对于水平线的倾斜角。
《线性系统理论》大作业报告引言:研究线性定常连续系统状态方程的解时,求解状态方程是进行动态系统分析与综合的基础,是进行定量分析的主要方法。
而线性定常连续系统状态方程的解由两个部分相加组成。
第一个部分是由初始状态所引起的自由运动,即状态的零输入响;第二个部分是由输入所引起的系统强迫运动,其值为输入函数与矩阵指数函数的卷积,即状态的零状态响应。
由于这两部分中都包含有状态转移矩阵,因此状态转移矩阵的计算是线性定常连续系统状态方程求解的关键。
本文先总结了的计算方法,并运用matlab命令求解证明各方法的正确性及给出相应的零输入响应仿真结果。
然后推导了脉冲响应的公式,希望通过飞机模型的例子来研究其系统的脉冲响应。
最后推广研究了任意输入的零状态响应。
第一部分的计算方法及零输入响应的仿真证明一.的计算方法1.根据的定义直接计算定义式是一个无穷级数,故在计算中必须考虑级数的收敛条件和计算收敛速度问题。
类似于标量指数函数,对所有有限的常数矩阵A和有限的时间t来说,矩阵指数函数这个无穷级数都是收敛的。
显然用此方法计算一般不能写成封闭的解析形式,只能得到数值计算的结果。
2.变换A为约旦标准型因为任何都可经线性变换成为对角矩阵或约旦矩阵,因此下面将利用对角矩阵和约旦矩阵的矩阵指数函数计算的简便性质,通过线性变换将一般形式的系统矩阵变换成对角矩阵或约旦矩阵计算其矩阵指数函数。
对于矩阵A,若经过非奇异变换(相似变换)矩阵P作变换后,有则3. 利用拉氏反变换求已知齐次方程两边取拉氏变换即对上式两边取拉氏反变换得齐次微分方程的解:而由定义法求得的齐次微分方程的解为比较两式得4. 应用凯莱—哈密顿定理求(1)由凯莱—哈密顿定理,方阵A 满足其自身的特征方程,即()1110 0n n n fA A a A a A a I--=++++=故121210...n n n n n A a A a A a A a I ----=-----它是的线性组合。
分数: ___________任课教师签字:___________研究生结课作业学年学期:课程名称:线性系统理论学生姓名:学号:提交时间:目录1 前言 (1)2.1状态反馈控制 (1)2.2数学模型 (3)3 直流电动机调速系统的设计与仿真 (5)3.1系统的能控性能观性分析 (5)3.1.1能控性定义 (5)3.1.2能控性判据 (5)3.1.3能观性定义 (7)3.1.4能观性判据 (7)3.1.5判断系统的能观性能观性 (8)3.2系统的稳定性分析 (9)3.3 LQR最优调节器的设计与仿真 (10)3.4通过状态反馈实现系统的极点配置 (12)3.4.1状态反馈的基本原理 (12)3.4.2 状态反馈的matlab实现 (13)4 状态观测器的设计 (15)4.1状态观测器的基本原理 (15)4.2状态观测器的matlab实现 (16)5 利用离散化方法研究系统的特性 (20)5.1连续线性系统离散化的概念 (20)5.2采样周期和仿真时间的选择 (21)5.3控制系统的离散化 (21)5.3.1 零阶保持器 (22)5.3.2双线性变换法离散化 (25)5.3.3采用一阶保持器离散化 (28)参考文献 (32)直流电动机调速系统的建模与控制系统的设计1 前言直流电机,是指输出或输入为直流电能的旋转电机,它是能实现直流电能和机械能互相转换的电机。
当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。
直流电机由定子(由机座、主磁极、换向磁极、前后端盖和刷架等部件组成)和转子(由电枢、换向器(又称整流子)和转轴等部件构成)两部分组成,其间有一定的气隙。
电能够实现直流电能这机械能相互转化的电机,当它作电动机运行时是直流电动机,将直流转换为机械能;作发电机运行时是直流发电机,将机械能转化为直流电能。
电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。
1、在造纸流程中,投料箱应该把纸浆流变成2cm 的射流,并均匀喷洒在网状传送带上。
为此,要精确控制喷射速度和传送速度之间的比例关系。
投料箱内的压力是需要控制的主要变量,它决定了纸浆的喷射速度。
投料箱内的总压力是纸浆液压和另外灌注的气压之和。
由压力控制的投料箱是个耦合系统,因此,我们很难用手工方法保证纸张的质量。
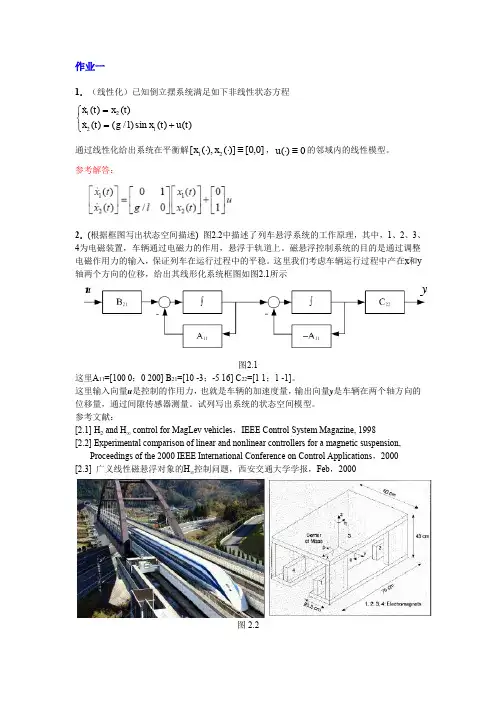
在特定的工作点上,将投料箱线性化,可以得到下面的状态空间模型:ẋ = [−0.8+0.02−0.020] x+[0.0510.0010] u y =[x 1 , x 2]其中,系统的状态变量x1=液面高度,x2=压力,系统的控制变量u1=纸浆流量u2=气压阀门的开启量。
在上述条件下,试设计合适的状态变量反馈控制器,使系统具有实特征根,且有一个根大于5解:下面是对此设计的MATLAB 程序实现:>> A=[-0.8 0.02;-0.02 0];>> B=[0.05 1;0.001,0];>> r=rank(ctrb(A,B))r =2>> C=[1 1];>> P=[1 6];>> K=place(A,B,P)K =1.0e+003 *-0.0200 -6.0000-0.0008 0.30002、描述恒速制导导弹的运动方程为:ẋ = [ 01000−0.1−0.50000.500000 010000.51000]x + [ 01000] uy =[ 0 0 0 1 0 ] x(a) 运用ctrb 函数计算系统的能控型矩阵,并验证系统是不可控的;(b) 计算从u 到Y 的传递函数,并消去传递函数中的分子和分母公因式,由此可以得到能控的状态空间模型。
在消去了公因子之后,请用tf2ss 函数确定新的状态变量模型;(c) 证明(b)中得到的状态变量模型是能控的;(d) 说明恒速制导导弹是否稳定?(e) 讨论状态变量模型的能控性和复杂性的关系(假设用状态变量的数目来度量复杂性)解程序如下:clearA=input('请输入系统矩阵:');B=input('请输入输入矩阵:');C=input('请输入输出矩阵:');Qc1=ctrb(A,B)N1=size(A);n1=N1(1) %判断状态方程维数rc1=rank(Qc1)if rc1==n1disp('系统可控')elseif rc1<n1disp('系统不可控')endsyms sI=eye(n1);Q=inv(s*I-A);sys=collect(C*Q*B) %求解原状态方程的频域传递函数并化简num=[500 250 50];den=[1 0 0];[A1 B1 C1 D1]=tf2ss(num,den)Qc2=ctrb(A1,B1)N2=size(A1);n2=N2(1) %判断状态方程维数rc2=rank(Qc2)if rc2==n2disp('系统可控')elseif rc2<n2disp('系统不可控')endd1=eig(A)'d2=eig(A1)'flag1=0;flag2=0;for i=1:n1if real(d1(i))>0flag1=1;endendif flag1==1disp('原系统不稳定')elsedisp('原系统稳定')endfor j=1:n2if real(d2(j))>0flag2=1;endendif flag2==1disp('新系统不稳定')elsedisp('新系统稳定')end运行结果:请输入系统矩阵:[0 1 0 0 0;-0.1 -0.5 0 0 0;0.5 0 0 0 0;0 0 10 0 0;0.5 1 0 0 0]请输入输入矩阵:[0;1;0;0;0]请输入输出矩阵:[0 0 0 1 0]Qc1 =0 1.0000 -0.5000 0.1500 -0.02501.0000 -0.5000 0.1500 -0.0250 -0.00250 0 0.5000 -0.2500 0.07500 0 0 5.0000 -2.50000 1.0000 0 -0.1000 0.0500n1 =5rc1 =4系统不可控sys =50/s^2/(10*s^2+5*s+1)A1 =0 01 0B1 =1C1 =250 50D1 =500Qc2 =1 00 1n2 =2rc2 =2系统可控d1 =0 0 0 -0.2500 - 0.1936i -0.2500 + 0.1936id2 =0 0原系统稳定新系统稳定分析:由上述分析结果可知原系统和新系统均稳定,而实际上由系统的极点可知,原系统是稳定的,新系统实际上处于临界稳定状态也可认为是不稳定的;若以状态变量的数目来度量复杂性,可知系统的完全可控性与复杂性存在类似反比的关系,及复杂性越高系统完全可控的难度越大,复杂性越低系统完全可控的难度越低。
第2章一、状态空间描述的建立1. (由系统机理建立状态空间描述) 如图电路,写出系统的状态方程和输出方程。
选择状态变量x =u c ,输入变量u = e (t ),输出变量y = u c 。
解:如图电路,写出系统的状态方程和输出方程。
选择状态变量x =u c ,输入变量u = e (t ),输出变量y = u c 。
解:11c c du e u R C ,x x u ,y xdt RC RC=+⋅=-+=2.(由输入输出描述建立状态空间描述)系统的传递函数如下,求系统的状态空间描述41265)(232+++++=s s s s s s G解:可控标准形, []x 115100x 6124100010x =⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎦⎤⎢⎢⎣⎡---=y u ; ; 或可观标准形, []x 100115x 6101201400x =⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎦⎤⎢⎢⎣⎡---=y u ; 3.例2.3 给定单输入单输出线性定常系统的输入输出描述为3324160720()16194640s s G s s s s ++=+++ 试求系统的状态空间表达式。
解:此例中3m n ==。
由长除法得3232324160720646161840()41619464016194640s s s s G s s s s s s s ++---==+++++++则系统的状态空间表达式为e(t)u c[][]112233123010000106401941611840616644x x x x u x x x y x u x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=---+⎢⎥⎢⎥⎣⎦4.例2.2:已知二阶系统的微分方程22yy y T u u ξωω++=+ 试求系统的状态空间表达式。
解:可控规范形实现为:[]1112222010121c c c c c c xx x u y T x x x ωξω⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤=+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦; 则可观测规范形实现为:[]2111222100112o o o o o o x x x u y x x x T ωξω⎡⎤⎡⎤-⎡⎤⎡⎤⎡⎤=+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦ ;二、传递函数矩阵的计算1.系统的状态空间描述如下,求系统的传递函数矩阵G (s ),u 10x 5261x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= ;x 0210⎥⎦⎤⎢⎣⎡=y 解:⎥⎦⎤⎢⎣⎡+-+=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+--+⎥⎦⎤⎢⎣⎡=-=--1217611052610210)I ()(211s s s s s B A s C s G 。
摘要:本文主要讨论线性系统解集的几何结构与系统能观性、能控性和稳定性之间的关系。
这一关系从两个方面来说明,第一部分讲述系统解集几何结构与特征值和特征向量之间的关系,通过Matlab 仿真例子说明这一关系;第二部分分别讲述特征值和特征向量与系统能观性、能控性和稳定性之间的关系,并讲述了能观性,能控性以及稳定性的定义和判据,通过以约旦标准型为例来讲述相同特征值和不同特征值情况下的能观性,能控性,最后在Simulink中仿真一定特征值条件下系统的稳定性。
从以上两个方面来说明解集的几何结构与系统能观性、能控性和稳定性之间的关系。
>1. 零输入响应解集与特征值和特征向量之间的关系线性定常系统状态方程x Ax Buy Cx Du=+⎧⎨=+⎩,0(0),0x x t =≥的解为()00()(),0t At A t x t e x e Bu d t τττ-=+≥⎰。
为了研究线性定常系统状态方程解集的几何结构与线性系统的特征之间的关系,将系统简化,只考虑系统为零输入的状态响应,即x Axy Cx=⎧⎨=⎩,0(0),0x x t =≥的解为0()At x t e x =。
所有的零输入状态响应组成了一个线性空间,且该线性空间中有n 个独立的元素,它们的线性组合决定了所有零输入响应。
所以可以通过选择一组线性独立的初始条件得到一组零输入响应集中的基底。
下面先考虑最简单的零输入状态响应集的基底。
若12,,...n λλλ是A 的两两互异的特征值,且12,,...n v v v 是相应的单位特征向量,即,1,2,...i i i Av v i n λ==。
选0,1,2,...i x v i n ==,则0()(...)......i At At i2233i 2233i i i i 2233i i i i i i i t i x t e x e v 11I +At +A t +A t +v 2!3!11v Av t A v t A v t 2!3!11v v t v t v t 2!3!e v λλλλ====++++=++++=-所以取01122...n n x v v v ααα=+++时,相应的零输入响应为121122()...n t t t n nx t e v e v e v λλλααα=+++由此可以看出线性定常系统的零输入响应解集的几何结构可以由系统矩阵A 的特征值和特征向量来表征。
《线性系统理论》设计报告专业:学号:姓名:教师:取状态变量为X=[U d,I d,n]T,则系统的状态空间描述为:{X=AX+Bu+ET lY=CX其中A=[−1T s0 01T la R−1T la−C eT la R0 375C TGD20]B=[K sT S]E=[−375GD2]C=[0 0 1 ]代入数据得:A=[−588.235 0 026.709 −20.833 −3.678 0 48.821 0 ]B=[23529.41]通过matlab检测系统的能控能观性并求出系统的特征值:对应的matlab程序如下:%原始系统能控能观性判断与特征值求解%A=[-588.235 0 0;26.709 -20.833 -3.678;0 48.821 0];B=[23529.41 0 0]';C=[0 0 1];D=0;disp(eig(A)); % 计算并输出特征值 %sys1=ss(A,B,C,D);Qc=ctrb(A,B); %生成能控性判别矩阵%Qo=obsv(A,C); %生成能观性判别矩阵%if length(A)==rank(Qc) %系统能控性判别%disp('系统完全可控!');elsedisp('系统不完全可控!');endif length(A)==rank(Qo) %系统能观性判别%disp('系统完全可观!');elsedisp('系统不完全可观!');end运行结果如下:1.0e+002 *-0.104165000000000 + 0.084297191975771i-0.104165000000000 - 0.084297191975771i-5.882350000000000系统完全可控!系统完全可观!系统特征值实部均为负,由此可知该系统为外部稳定的能控但不能观测系统,设负载转矩为0时,输入为阶跃信号,系统的simulink仿真如下:图1. 原始开环系统结构框图图2.原始开环系统仿真图1、状态反馈加积分器校正的输出反馈系统根据仿真结果可以看出原系统的调节时间大于1s ,不能满足不大于0.5s 的要求;又要求系统跟踪阶跃输入信号的稳态误差为零,故系统不仅要通过求解状态反馈增益矩阵改变极点配置,还需设置积分器校正的输出反馈来消除稳态误差。
因为要求被控系统∑(A,B,C )能控,又控制维数(r=1)不少于误差的维数(m=1)且rankC=1=m, 即增广系统状态完全能控,因此可采用状态反馈控制律:u =−K 1x +K 2w改善系统的动态和稳态性能,式中K 1=[K 11 K 12 K 13] 。
闭环控制系统的特征多项式为:12()det 0A BK BK p s sI C-⎡⎤=-=⎢⎥-⎣⎦s 4+(609.068+23529.41K 11)s 3+(12434.263+628447.012K 12+490188.199K 11)s 2+(30681411.558K 13+4225026.46K 11+105625.617)s +30681411.558K 2由于最大超调量%10021⨯=--ζζπeM p ,当振幅进入%2±范围内时调节时间ns t ζω4=,其中Tn 1=ω为系统自然振荡角频率。
由于系统设计要求为超调量不超过10%,调节时间不超过0.5秒,可计算得到:%10≤P M ,591.0≥ζ,取0.7ζ=,5.04≤=ns t ζω,53.13≥n ω,取14n ω=,二阶系统的特征根122,1-±-=ζωζωn n s ,可得期望特征值19.89.99S j =-+,29.8-9.99S j =-,原系统闭环非主导极点离虚轴为主导极点的5倍以上,故无需进行配置,再取另一个期望非主导极点为-50,则S 3=-588.235, S 4=-50,运用expand 函数求得期望特征多项式为:expand((s+588.35)*(s+50)*(s+9.8-9.99i)*(s+9.8+9.99i))运行结果:s^4 + (13159*s^3)/20 + (421250001*s^2)/10000 + (140319505567*s)/200000 + 23044504567/4000即(s −s 1)(s −s 2)(s −s 3)(s −s 4)=s 4+657.95s 3+42125s 2+701597.528s +5761126.14根据对应系数相等计算得到:K 11=0.00208,K 12=0.04562,K 13=0.01914,K 2=0.18777 确定了状态反馈增益矩阵1K 和积分增益常数2K ,在未考虑扰动作用时(设d=0),闭环系统对给定输入v(t)为阶跃信号的响应可通过求解下式获得,即 []1210010A BK BK x v w C w x y C xw ⎧-⎡⎤⎡⎤⎡⎤⎡⎤=+⎪⎢⎥⎢⎥⎢⎥⎢⎥-⎪⎣⎦⎣⎦⎣⎦⎣⎦⎨⎡⎤⎪==⎢⎥⎪⎣⎦⎩x && 式中, v(t)=1(t)Simulink 仿真如下:图3.状态反馈加积分器校正的输出反馈系统仿真图输出波形:图4.状态反馈加积分器校正的输出反馈系统仿真波形0秒时加阶跃的负载扰动,其仿真波形如下:图5 加负载扰动时仿真波形由图4可知,该状态反馈系统的静、动态性能如下:σ=1.0435−11×100%=4.35%,t s <0.5s,皆满足系统要求。
扰动后,曲线最终稳定在1,则系统稳态误差为0。
2、全维状态观测器的设计闭环状态观测器的状态方程ˆˆ()xA GC x Gy Bu =-++,又由观测误差 ()()000ˆ()()[()()]A GC t A GC t x x t e t e xt x t --∆=∆=-知,通过选择输出偏差反馈增益矩阵G 使A GC -的所有特征值均位于复平面的左半平面,尽管初始时刻0t 时,0()x t 与0ˆ()x t 存在差异,观测器的状态ˆ()xt 仍将以一定精度和速度渐渐逼近系统的实际状态()x t 。
而输出偏差反馈增益矩阵G 由观测器极点决定,因此,状态估计误差收敛速度是由观测器极点所决定。
通过合理选择观测器极点而配置的反馈矩阵G ,状态估计误差收敛速度足够快,就能使重构状态ˆ()xt 渐近等价于真实状态()x t ,从而达到状态反馈的效果,即改善被控系统的稳定性、稳态误差和动态品质因数,而且可实现闭环系统的解耦控制和最优控制。
由原系统完全能观可知,可构造状态观测器对其状态给出估值。
设观测器增益矩阵[]Tg g g G 21=,()0()det p s sI A GC =--=s 3+(609.068+g2)s 2+(1243.4+48.821g1+609.068g2)s +105625.617+1303.960g0+28718.221g1+12254.7g2经过状态反馈后的系统状态空间表达式中个矩阵分别为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-----=00-2e 1131211s 37511GD C RT C T RT T K K T K K T K K T T la la lass s s ss A ,00s s K T B ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦,[]100=C ,带入数据可得A =[−637.117 −1073.51 −450.31626.709 −20.833 −3.6780 48.821 0 ]B =[23529.41] []100=C 由第一问求得反馈矩阵K 11=0.00208,K 12=0.04562,K 13=0.01914 F=K=[ 0.00208 0.04562 0.01914]在MATLAB 输入程序如下: P=poly(A-B*K); roots(P) ans =-506.563 -147.896 -7.717图6 全维状态观测器结构图从工程实际出发,兼顾快速性、抗干扰性等,选择观测器的响应速度比所考虑的状态反馈闭环系统快2-5倍。
故取s 1∗=−1200,s 2∗=−500,s 3∗=−35,则期望特征多项式为:D ∗=s 3+1735s 2+659500s +21000000D(s)= s 3+(609.068+g2)s 2+(1243.4+48.821g1+609.068g2)s +105625.617+1303.960g0+28718.221g1+12254.7g2可解得g0= 17853.509, g1=-563.539, g2=1125.932带观测器的状态反馈加积分调节系统仿真结构如图6。
仿真输出与观测器输出波形图如下:图7 系统加全维观测器输出波形图图7 全维状态观测器波形图由仿真图可知,系统的稳态误差为0,动态误差满足超调量σ<10%,调节时间T s<0.5s的要求。
状态估计误差收敛速度与状态观测器极点的配置有关。
一般而言状态观测器极点在复平面的左半开平面距离虚轴距离越远,则估计误差收敛速度越快。
但是,观测器响应速度过快会产生大量噪声,影响系统的正常工作故不宜取值过大。
综合工程实际出发,一般取为比状态反馈闭环系统快2—5倍。
3、限制电动机电枢过电流方法为了解决反馈闭环调速系统的起动和堵转时电流过大的问题,系统中引入电流截止负反馈,电流截止负反馈调速系统通过一个电压比较环节,使电流负反馈环节只有在电流超过某个允许值时才起作用,电动机启动时,因为电流截止负反馈作用,从而限制启动电流。
正常工作时,电流截止负反馈作用很小。
电动机发生堵转时,由于电流截止负反馈的作用,使U d大大下降,因而使I a不致过大。
允许的堵转电流一般为电动机额定电流的2~2.5倍。
系统工作在额定值时,由于电流截止负反馈起作用,从而保证系统设备的安全。
4、二次型最优控制由前边的计算可知原始系统为完全可控的,最优控制的性能指标函数为:01()()()()2T T t J x t Qx t u t Ru t dt ∞⎡⎤=+⎣⎦⎰,其中,Q 为状态加权系数矩阵,R 为控制加权系数矩阵,设Q =[q 11 0 00 q 22 00 0 q 33],R 取1。
非零点给定的定常输出器设计中,KX r k PX B R U T-=-=-11*,P 为代数方程01=-+---Q P B PBR P A PA T T 的解。
为求得最优状态反馈矩阵K 和k1,先令q 11=1,q 22=1,q 33=100,反代入上式,利用matlab 中的lqr 函数计算线性二次型最优控制的解。
即:K=lqr (A ,B ,Q ,R ),运行得:K=[0.9867,10.081,31.4838],k1=1.702 系统在零负载转矩下的阶跃响应仿真程序如下:A=[-588.235 0 0;26.709 -20.833 -3.678;0 48.821 0]; B=[23529.41 0 0]'; C=[0 0 1]; D=0;R=1;Q= [1 0 0;0 1 0;0 0 1000]; K=lqr(A,B,Q,R);ac=A-B*K;k1=inv((-C/(A-B*K))*B); bc=B*k1; cc=C; dc=D;step(ac,bc,cc,dc);Grid运行后仿真结果如下图:图8线性二次型最优全状态反馈仿真曲线为了研究系统二次型性能指标泛函中权矩阵Q的不同选取对动态性能的影响,对q11、q22、q33取不同值时的权矩阵进行仿真试验。