线性系统理论答案
- 格式:doc
- 大小:3.16 MB
- 文档页数:51
1-1 证明:由矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=12-n 1-n n- - - -1 0 1 0 00 0 1 0a a a a A可知A 的特征多项式为nn n n n n n n n n nn n n n a a a a a a a a a a a a a a a a a a a a a a a A I ++++++=+++++=+++=++=+=-+λλλλλλλλλλλλλλλλλλλλλλλ1-3-32-21-11-3-3122-2-1-n 13-n 2-n 21-1n 12-n 1-n 12-n 1-n n1- )1(-)1(- 00 0 1- )1(-)1(- 0 00 1-1 0 1- 0 00 1-若i λ是A 的特征值,则00 0 0 1 10 1- 0 0 0 1-111n 1-n i 12-n 1-n n =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=++++=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+--ni n i n i i i i i a a a a a a a λλλλλλλλ 所以[]Ti i 1-n i 2 1 λλλ 是属于i λ的特征向量。
1-7 解:由于()ττ--t e t g =,,可知当τ<t 时,()0≠τ,t g ,所以系统不具有因果性。
又由于()()0 ,,ττ-=t g t g ,所以系统是时不变的。
1-8 解:容易验证该系统满足齐次性与可加性,所以此系统是线性的。
由于()()t 0 t ⎩⎨⎧>≤-=-=ααββαβαt u t u P u Q P 而()()⎩⎨⎧+>+≤-=⎩⎨⎧>≤=βαβαβααβαβ t 0 t t 0 t t u t u Q u P Q ,故u P Q u Q P αββα≠,所以系统是时变的。
又因为()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,T T t u t u P u P P T T min t 0 min t t 0 t 而()()()()()()()⎩⎨⎧>≤=⎩⎨⎧>≤=ααααα,,,,T T t u T T t u P u P P P T T T min t 0 min t min t 0 min t ,故()()u P P P u P P T T T αα=,所以系统具有因果性。


第三章作业及答案3.1 判断下列系统的能控性和能观测性。
2) []x y u x x 111,100041020122-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=解:2C 012000101Q bAbA b -⎡⎤⎢⎥⎡⎤==⎣⎦⎢⎥⎢⎥-⎣⎦,2c rankQ n =<∴ 系统是状态不完全能控的2111101121o c Q cA cA -⎡⎤⎡⎤⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦,o 2rankQ n =<∴ 系统是状态不完全能观测的。
3.2 判断下列系统的能控性和能观测性。
1) []x y u x x 101,101300040002=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=2) x y u x x⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=01011000,1110000130000200001000113) []x y u x x 101,110200020012=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=4) x y u x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=610321,029331100050005解:由系统能控和能观测性判据:1)A 为对角标准型,且对角元素互不相同,B 阵有全零元素的行,所以系统是不完全能控;C 阵中有全零元素的列,故系统是不完全能观测的。
2)1100100100000001A B C=0020011010000311⎡⎤⎡⎤⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦A 为约旦标准型,且各约旦块对角元素不相同,第一个约旦块最后一行对应到B 阵中的相应行为全零元素行,所以系统是不完全能控的;而各约旦块第一列对应到C 阵无全零元素列,所以系统是完全能观测的。
3)A =210020002⎡⎤-⎢⎥-⎢⎥⎢⎥-⎣⎦ B =011⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦C =[]101A 为约旦标准型,但两个约旦块元素相同,课本上给出的由标准型判定系统能控、能观测的定理不再适用,因此要采用能控性判别矩阵和能观测性判别矩阵来判断。
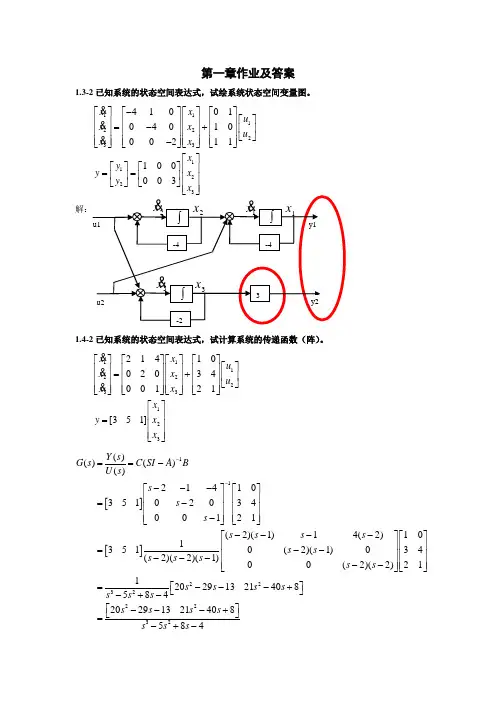
第一章作业及答案1.3-2已知系统的状态空间表达式,试绘系统状态空间变量图。
11122233112241001040100021110003xx u x x u x x x y y x y -⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎡⎤⎡⎤⎢⎥==⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦1.4-2已知系统的状态空间表达式,试计算系统的传递函数(阵)。
11122233123214100203400121[351]xx u x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦[][]112232()()()()21410351020340121(2)(1)14(2)1013510(2)(1)034(2)(2)(1)00(2)(2)21120291321408584Y s G s C SI A B U s s s s s s s s s s s s s s s s s s s s s s --==----⎡⎤⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦----⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥---⎢⎥⎢⎥--⎣⎦⎣⎦⎡⎤=---+⎣⎦-+-223220291321408584s s s s s s s ⎡⎤---+⎣⎦=-+-注意:也可写做[][][]23220212940138584s s s s s +--+--+-1.5-1已知系统传递函数,试用传递函数求出系统的状态空间模型。
2()35()()(3)(2)Y s s G s U s s s +==++解:通过赋予研究对象不同的内部结构可将传递函数转换成不同的状态空间模型。
(1)求出上述传递函数能控标准型表示由已知条件可知该传递函数为严格真分式,且该系统为单入单出(SISO )三阶系统。
根据公式10111()...(),(1)()...mm mn n nY s b s b s b G s n m U s s a sa --+++===++++其中,可将传递函数写为223235035()(3)(2)82118s s s G s s s s s s +++==+++++其中,123012a 8,21,18,0,3,5a a b b b ======。


2-17 证明:①首先证明()T T T B C A ,,是()s G 的不可简约实现(该题有问题,不是()TT TCB A,,)。
由于()s G 是对称传递函数阵,故有()()T T T C sI B B A sI C 1-1-A --=,所以()TT TBC A,,是()s G 的实现。
又因为()[]n CA CA Crank CA C A C rank n Tn TT T T =⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=1-1- ,其可控; 同理可证其可观,故系统()T T T B C A ,,是可控可观的。
所以其是()s G 的不可简约实现。
②证明P 的对称性。
由题设易知,由于()T T T B C A ,,是()s G 的不可简约实现,则存在非奇异阵P ,使得TT T BCPC PB A PAP===--11,,。
由T T T T T T P P I P P P CP P B C C PB =⇒=⇒==⇒=--11 所以P 是非奇异对称阵。
③证明P 的唯一性。
由T C PB =,很容易知道1-=B C P T ,故知P 是唯一的。
综上可知,命题得证。
2-18 解:[]1 1 3- 4 2301 4 0 2- 3-0 3 2- 6-0 02 0 0 0 0 1 -=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=C B A 。
a.① ><B A |由[]⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡==65 17 5 2 3 3 3 3 00 0 0 1 1 1 1 32B A B A AB B U 所以)53012301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<,span B A 。
② η()⇔⋂=kCAker η064 27 118- 145-16 9 34- 43-4 3 10- 13-1 1 3- 4 032=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-⇔=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡x x CACA CA C故)12101301(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,span η ③ ><⋂B A |η即任意>⇔<⋂∈B A x |η2153012301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=,同时有4312101301x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=故0--1 1 5 22 3 3 31 0 0 00 1 1 14321=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x x x x ,有)1301(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂span B A η ④ ⊥><⋂B A |η 易知,⇔>∈<⊥B A x |[]065 17 5 2 3 3 3 3 0 0 0 0 1 1 1 1 32=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=T TxB A B A AB B x,即 065 3 0 117 3 0 15 3 0 12 3 0 1=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡x 所以)0103-0010(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⊥,span B A 同③,可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=><⋂⊥0000|B A η⑤ ><⋂⊥B A |η)101-1-0123(⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=⊥,span η同③可知⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡>=<⋂⊥0000|B A η⑥ ⊥⊥><⋂B A |η易知)0123(|⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=><⋂⊥⊥span B A η 综上可知,上述空间的维数加起来不等于4,故在上述空间的直和空间中不能取到状态空间的基底。

1.7 证明:())()det(det )det(det )(det )det()det()(1111λλλλλλλA B A I T A I T T A I T AT T I B I AT T B B A ∆=-=⋅-⋅-=-=-=∆⇒=----相似,与设= 又因为特征值为特征方程()0λ∆=的根,故特征值也相同。
1.11 解:可以参照课本P18的例题1.12(1),3,2,1)3)(2)(1()(,300020104132111===⇒---=∆⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=λλλλλλA A ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡==Λ∴⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⇒⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⇒=--3211000105411050140010)(1113211Q A Q Q q q q q A I ,,由λ(4),2,1,1)2)(1)(1()(4344111432124==-==⇒-+-=∆⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--λλλλλλλA ,1241243111111()0,111122,()012,12,4822 2.P I A q q q u I A q q u λλλλλξλλη⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥==--=⇒==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦==-=⎡⎤⎢⎥⎢⎥==<=⎢⎥⎢⎥⎣⎦===对于,,由对于的特征值,其代数重数 由计算其对应的特征向量计算出一个特征向量,即几何重数个数小于代数重数,即标准型中存在一个对应的约当块,约当块的阶数即的指数可以利用[]4443434123414418 1.682,()001110111121,,44114412121181211212q I A q q q c q q Q q q q q Q A Q λλ-=-=⇒⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥=⋅-=∴==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥-⎢⎥∴Λ==⎢⎥⎢⎥⎣⎦的式计算的广义特征向量由取1.12 证明:12n 222112n n 1n-1n-112n 21n 121n 1221n n 1n-3n-3221n 21n-22n-2n-2221n n 1111(1110()()0()()(0()()λλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλλ-⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦⎡⎤--⎢⎥--⎢⎥--⎢⎥==⎢⎥--⎢⎥⎢⎥--⎣⎦后一行减去前一行的倍)n-221n n 123n 2131n 1n-2n-2n-223n j i 1i j n)()111()()()()()λλλλλλλλλλλλλλλλλλ≤<≤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎡⎤⎢⎥⎢⎥=---=⎢⎥⎢⎥⎣⎦=-∏同理2.6 解:(d) 令24231211y x y x yx y x ====,,,,则状态空间方程为: u m m k m k m k mk ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡--=0010020100000200112211x xx y ⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=010*******y y (e) 令yx y x ==21,,则状态空间方程为: u e e t t ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=-10102x x[]x y 01= 2.7 解:(c)非线性方程: ⎩⎨⎧==21221u-x xx x[]x y 01= (d) 设⎪⎩⎪⎨⎧+=⇒=+⋅++-=⇒=+⋅+ux sx x u)(x s u x x sx x s )x (u 333221122121112,则状态空间方程可为:u ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=310312x x[]x y 01= 另法:先求出传递函数2323s G(s)s s +=+-,按2.6(b )方法求解。

《线性系统理论》作业参考答案1-1 证明:由矩阵úúúúúúûùêêêêêêëé----=--121000001000010a a a a A n n nL M O M M M L L L则A 的特征多项式为nn n n n n n n n n n n n n n n n n na a a a a a a a a a a a a a a a a A I +++==+--++--=--++--=+--=--------+-----L L L M O MM ML LL L M O M M M L L L L M O MMM L L L112114322111321121)1()1(00001001)1()1(000010001000010001l l l l l l ll l l l l l l l l ll 若i l 是A 的特征值,则00001000010001)(1112121=úúúúúúûùêêêêêêëé+++=úúúúúúûùêêêêêêëéúúúúúúûùêêêêêêëé+--=-----n n i n i n i i i in n ni i i i i a a a a a a A I L M M L M O M M M L L L l l l l l l l l l u l 这表明[]Tn ii i121-l l l L 是i l 所对应的特征向量。


第二章作业及答案2.1 用三种方法计算下列矩阵A 的矩阵指数函数At e 。
1)⎥⎦⎤⎢⎣⎡--=5160A ;解:(1)用定义计算At e22332323232323112!3!1006-6 -30 30 114110115 5 19-19 -6523!135615195191965152626AteI At A t A t t t t t t t t t t t t t t t =++++⎡⎤⎡⎤⎡⎤⎡⎤=+++⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤-++-++⎢⎥=⎢⎥-+-+-+++⎢⎥⎣⎦+ (2)拉氏变换法计算At e (注意 求逆 伴随矩阵 计算能力)11111112323[()]6155656(s 3)(2)(s 3)(2)111s (5)6(s 3)(2)(s 3)(2)32662323113232323266Att tt teL sI A s L s s s s s LL s s s s s s s s s L ss s s e e e e-----------=--⎡⎤=⎢⎥+⎣⎦+⎡⎤⎢⎥+++++⎡⎤⎢⎥==⎢⎥--++⎢⎥⎣⎦⎢⎥++++⎣⎦⎡⎤--⎢⎥++++=⎢⎥⎢⎥--⎢⎥++++⎣⎦--=323232tttt e eee ----⎡⎤⎢⎥--⎣⎦(3)待定系数法(凯莱-哈密尔顿Cayley-Hamilton 法)计算Ate256I A λλλ-=++ ∴123,2λλ=-=-112210)()()()(--++++=n n AtAt A t A t I t eαααα ,根据凯莱-哈密尔顿定理,有112i 2i 10)()()()(i --++++=n n tt t t t eλαλαλααλ (注意:书上p42-43错!0α后不应乘以I )01201()()(3)()()(2)t te t t et t αααα--=+-=+-解之得 232301()32()t t ttt e e t ee αα----=-=-,0123233232()()326632Att t t ttttt et I t A e e e ee eee αα--------=+⎡⎤--=⎢⎥--⎣⎦ (4)非奇异变换法(对角、约旦标准形法)计算At e11n t AtPAP11t ePePP P e e λλ---⎡⎤⎢⎥==⎢⎥⎢⎥⎣⎦256I A λλλ-=++ ∴123,2λλ=-=-当31-=λ时,求A 的特征向量11112p p p ⎡⎤=⎢⎥⎣⎦1111111112126p p 36(I A)p 0015p p 12λλλ---⎡⎤⎡⎤⎡⎤⎡⎤-=⇒==⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦1112111123p 6p 02p p 2p 01--=-⎧⎡⎤∴⇒=⎨⎢⎥+=⎣⎦⎩(注意,p 1不唯一,但最终求得的A P P 1-唯一)当2-=λ时,求A 的特征向量21222p p p ⎡⎤=⎢⎥⎣⎦2212122222226p p 26(I A)p 0015p p 13λλλ---⎡⎤⎡⎤⎡⎤⎡⎤-=⇒==⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦1112211122p 6p 03p p 3p 01--=-⎧⎡⎤∴⇒=⎨⎢⎥+=⎣⎦⎩(同样,p 2不唯一)[]1223P p p 11--⎡⎤∴==⎢⎥⎣⎦ 113-13P-121-2--⎡⎤⎡⎤∴=-=⎢⎥⎢⎥⎣⎦⎣⎦112tAtPAP11t 3t23232t 32320ePePP P 023-1303266111-2032ttt tt ttt e e e e e e ee e e ee λλ-------------⎡⎤==⎢⎥⎣⎦--⎡⎤⎡⎤--⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦(注意:P 中一列对应的特征向量应与1n t t e e λλ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦相对应)2.3 已知系统方程如下,[]xy ux x 11015610-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= ,求输入和初值为以下值时的状态响应和输出响应。
第一章 数学基础1、加法不变性:R(S)中存在零元0,使得对()()S R s f ∈∀,都有()()s f s f =+0成立。
乘法不变性:R(S)中存在单位元1,使得对()()S R s f ∈∀,都有()()()s f s f s f =⋅=⋅11成立。
2、反证法证明:(1)加法不变性的唯一性假设在域F 中,存在0和0’,0≠0’,..t s αααα=+=+'0,0,对F ∈∀α成立。
以α+0=α为例,取α=0’,则0’+0=0’ 因为0’为零元,所以0’+0=0 所以0’=0,与假设矛盾。
(2)乘法不变性的唯一性假设在域F 中,存在1和1’,'11≠,..t s αααααα=⋅=⋅=⋅=⋅'1'1,11,对F ∈∀α成立。
以ααα=⋅=⋅11为例,取'1=α,则有'1'111'1=⋅=⋅ '1为单位元1'111'1=⋅=⋅∴'11=∴ 与假设矛盾3、试用反例证明你对下列问题的回答域交换环 环 []R s 是是 是 n n R *是是 元素[]R s ∈的对角矩阵是是 是 []p R s 是 是 是[]n np R s *是是其中:()p R s 是元素为常态的实有理分式(当s →∞,()R s 有界);()n n p R s ⨯是元素属于()p R s 的n n ⨯矩阵证明:⑴[]R s 不是域。
如 ()1f +=s s ,显然()[]s R s f ∉-1。
(2)n nR* 不是交换环。
如⎥⎦⎤⎢⎣⎡=1010α,⎥⎦⎤⎢⎣⎡=0101β,显然22⨯∈R βα、。
但是βααβ≠。
(3)不是域。
如⎥⎦⎤⎢⎣⎡+=0001s α,1-α不存在。
(4)()p R s 不是域。
如∈+=1s 1α()p R s ,1-α=s+1.∞→∞→-1α时,s , 所以1-α∉()p R s 。
线性系统理论多年考题和答案2019级综合大题⎡400⎤⎡1⎤⎥x +⎢1⎥u x =⎢0-21⎢⎥⎢⎥⎢⎢⎣00-1⎥⎦⎣0⎥⎦y =[112]x1 能否通过状态反馈设计将系统特征值配置到平面任意位置?2 控规范分解求上述方程的不可简约形式?3 求方程的传递函数;4 验证系统是否渐近稳定、BIBO 稳定、李氏稳定;(各种稳定之间的关系和判定方法!)5 可能通过状态反馈将不可简约方程特征值配置到-2,-3?若能,确定K ,若不能,请说明理由;6 能否为系统不可简约方程设计全阶状态观测器,使其特征值为-4,-5; 7画出不可简约方程带有状态观测器的状态反馈系统结构图。
参考解答: 1.判断能控性:能控矩阵M =⎡⎣B可控,不能任意配置极点。
2按可控规范型分解AB⎡1416⎤⎢1-24⎥, rank (M ) =2. 系统不完全A 2B ⎤=⎦⎢⎥⎢⎣000⎥⎦⎡1⎢3140⎡⎤⎢1⎢⎥-1取M 的前两列,并加1与其线性无关列构成P =1-20,求得P =⎢⎢⎥⎢6⎢⎥⎢⎣001⎦⎢0⎢⎣2⎤⎡08⎢3⎥⎡1⎤⎢⎥1⎢⎥-1-1进行变换=PAP ⎢12-⎥, =PB =0, =cP =[222]⎢⎥⎢6⎥⎢⎢⎥⎣0⎥⎦001⎢⎥⎢⎥⎣⎦2⎤0⎥3⎥1-0⎥⎥6⎥01⎥⎥⎦⎧⎡08⎤⎡1⎤⎪x =⎢⎥x +⎢0⎥u12所以系统不可简约实现为⎨⎣⎦⎣⎦⎪y =[22]x ⎩3.G (s ) =c (sI -A ) -1B =4.2(s -1)(s +1) 2(s -1)=(s -4)(s +2)(s +1) (s -4)(s +2)det(sI -A ) =(s -4)(s +2)(s +1) ,系统有一极点4,位于复平面的右部,故不是渐近稳定。
G (s ) =c (sI -A ) -1B =2(s -1),极点为4,-2,存在位于右半平面的极点,故系统不(s -4)(s +2)是BIBO 稳定。
系统发散,不是李氏稳定。