simulink建模
- 格式:ppt
- 大小:777.50 KB
- 文档页数:48
matlab的simulink仿真建模举例-回复Matlab的Simulink仿真建模举例Simulink是Matlab附带的一款强大的仿真建模工具,它能够帮助工程师们通过可视化的方式建立和调试动态系统模型。
Simulink通过简化传统的数学模型建立过程,使得工程师们能够更加直观地理解和分析复杂的系统。
在本文中,我们将介绍一个关于电机控制系统的Simulink仿真建模的例子。
一、了解电机控制系统在开始建模之前,我们首先需要了解电机控制系统的基本原理。
电机控制系统通常包括输入、电机和输出三个主要部分。
输入通常是来自于传感器或用户的命令信号,例如转速、位置或力矩。
电机是通过接受输入信号并根据特定的控制算法生成输出信号。
输出信号通常是电机的转速、位置或功率等。
控制算法通常采用比例-积分-微分(PID)控制或者其他控制算法。
二、建立Simulink模型1. 创建新的Simulink模型在Matlab主界面中,选择Simulink选项卡下的“New Model”创建一个新的Simulink模型。
2. 添加输入信号在Simulink模型中,我们首先需要添加输入信号模块。
在Simulink库浏览器中选择“Sources”类别,在右侧面板中找到“Step”模块,并将其拖放到模型中。
3. 添加电机模型接下来,我们需要将电机模型添加到Simulink模型中。
Simulink库浏览器中选择“Simscape”类别,在右侧面板中找到“Simscape Electrical”子类别,然后找到“Simscape模型”模块,并将其拖放到模型中。
4. 连接输入信号和电机模型将输入信号模块的输出端口与电机模型的输入端口相连,以建立输入信号与电机模型之间的连接。
5. 添加输出信号模块在Simulink模型中,我们还需要添加输出信号模块。
在Simulink库浏览器中选择“Sinks”类别,在右侧面板中找到“Scope”模块,并将其拖放到模型中。

如何使用MATLABSimulink进行系统建模如何使用MATLAB Simulink进行系统建模第一章:MATLAB Simulink简介Matlab Simulink是一款基于MATLAB的工程工具软件,用于进行系统建模和仿真。
它提供了一种直观的图形化方法,使工程师能够轻松地建立和模拟复杂的系统。
Simulink支持各种工程学科,包括电气、机械、控制和通信等领域。
本章将简要介绍MATLAB Simulink的基本概念和主要功能。
1.1 Simulink的基本概念Simulink使用图形化的方式进行系统建模,系统模型由各种元件和信号线组成。
元件表示系统的各个组成部分,信号线表示元件之间的数据传输。
1.2 Simulink的主要功能Simulink具有以下主要功能:- 系统建模:通过拖拽和连接元件,可以快速搭建系统模型。
- 仿真和调试:使用仿真器可以对系统模型进行实时仿真,并进行调试和分析。
- 自动代码生成:Simulink可以自动生成C、C++、Verilog等编程语言的代码,可用于系统的实现和验证。
第二章:Simulink建模基础在本章中,我们将详细介绍如何使用Simulink进行系统建模的基础知识和技巧。
2.1 模型创建在Simulink中,可以通过选择“File -> New Model”来创建一个新的模型。
在模型中,可以使用工具栏上的元件库来选择需要的元件,然后将其拖拽到模型中。
2.2 连接元件在模型中,元件之间的连接通常使用信号线来表示。
可以通过鼠标点击元件输出端口和输入端口的方式来建立连接。
可以使用线段工具来绘制信号线,也可以使用Ctrl + 鼠标点击来删除信号线。
2.3 参数设置在建模过程中,可以通过双击元件来设置各个元件的参数。
每个元件都有各自的参数面板,可以根据具体需求进行设置。
第三章:Simulink高级建模技巧在本章中,我们将介绍一些进阶的Simulink建模技巧,如子系统的使用、模型的分层和复用等。
simulink建模与仿真流程我们需要在Simulink中创建一个新的模型。
打开Simulink软件后,选择“File”菜单中的“New”选项,然后选择“Model”来创建一个新的模型。
接着,我们可以在模型中添加各种组件,如信号源、传感器、执行器等,以及各种数学运算、逻辑运算和控制算法等。
在建模过程中,我们需要定义模型的输入和输出。
在Simulink中,可以使用信号源模块来定义模型的输入信号,如阶跃信号、正弦信号等。
而模型的输出信号可以通过添加显示模块来实现,如示波器模块、作用域模块等。
接下来,我们需要配置模型的参数。
在Simulink中,可以通过双击组件来打开其参数设置对话框,然后根据需求进行参数配置。
例如,对于控制系统模型,我们可以设置控制器的增益、采样时间等参数。
完成模型的配置后,我们可以进行仿真运行。
在Simulink中,可以选择“Simulation”菜单中的“Run”选项来运行仿真。
在仿真过程中,Simulink会根据模型的输入和参数进行计算,并生成相应的输出结果。
我们可以通过示波器模块来实时显示模型的输出信号,以便进行结果分析和调试。
在仿真过程中,我们可以通过修改模型的参数来进行参数调优。
例如,可以改变控制器的增益值,然后重新运行仿真,观察输出结果的变化。
通过不断调整参数,我们可以优化模型的性能,使其达到设计要求。
除了单一模型的仿真,Simulink还支持多模型的联合仿真。
通过将多个模型进行连接,可以实现系统级的仿真。
例如,我们可以将控制系统模型和物理系统模型进行连接,以实现对整个控制系统的仿真。
在仿真完成后,我们可以对仿真结果进行分析和评估。
Simulink提供了丰富的分析工具,如频谱分析、时域分析和稳定性分析等。
通过对仿真结果的分析,我们可以评估模型的性能,并进行进一步的改进和优化。
Simulink建模与仿真流程包括创建模型、添加组件、定义输入输出、配置参数、运行仿真、参数调优、联合仿真和结果分析等步骤。

如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
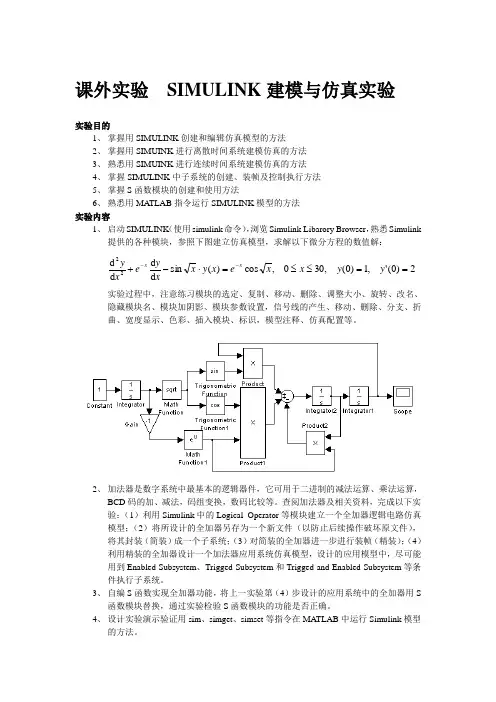
课外实验 SIMULINK 建模与仿真实验 实验目的1、 掌握用SIMULINK 创建和编辑仿真模型的方法2、 掌握用SIMUINK 进行离散时间系统建模仿真的方法3、 熟悉用SIMUINK 进行连续时间系统建模仿真的方法4、 掌握SIMULINK 中子系统的创建、装帧及控制执行方法5、 掌握S 函数模块的创建和使用方法6、 熟悉用MA TLAB 指令运行SIMULINK 模型的方法实验内容1、 启动SIMULINK (使用simulink 命令),浏览Simulink Libarory Browser ,熟悉Simulink 提供的各种模块,参照下图建立仿真模型,求解以下微分方程的数值解: 2)0(',1)0(,300,cos )(sin d d d d 22==≤≤=⋅-+--y y x x e x y x x y e x y x x 实验过程中,注意练习模块的选定、复制、移动、删除、调整大小、旋转、改名、隐藏模块名、模块加阴影、模块参数设置,信号线的产生、移动、删除、分支、折曲、宽度显示、色彩、插入模块、标识,模型注释、仿真配置等。
2、 加法器是数字系统中最基本的逻辑器件,它可用于二进制的减法运算、乘法运算,BCD 码的加、减法,码组变换,数码比较等。
查阅加法器及相关资料,完成以下实验:(1)利用Simulink 中的Logical Operator 等模块建立一个全加器逻辑电路仿真模型;(2)将所设计的全加器另存为一个新文件(以防止后续操作破坏原文件),将其封装(简装)成一个子系统;(3)对简装的全加器进一步进行装帧(精装);(4)利用精装的全加器设计一个加法器应用系统仿真模型,设计的应用模型中,尽可能用到Enabled Subsystem 、Trigged Subsystem 和Trigged and Enabled Subsystem 等条件执行子系统。
3、 自编S 函数实现全加器功能,将上一实验第(4)步设计的应用系统中的全加器用S 函数模块替换,通过实验检验S 函数模块的功能是否正确。
如何使用MATLAB的Simulink进行系统建模第一章:Simulink概述1.1 Simulink的定义和作用1.2 Simulink的特点和优势第二章:Simulink的基本操作2.1 Simulink的工作环境介绍2.2 模型的创建和保存2.3 模块的选择和添加2.4 参数设置和数据导入2.5 信号的连接和仿真第三章:系统建模的基本步骤3.1 确定建模目标和系统边界3.2 选择系统建模方法3.3 确定系统的输入和输出3.4 建立系统模型框图3.5 分析系统的动态特性第四章:系统建模方法介绍4.1 传递函数法4.1.1 传递函数的定义和性质4.1.2 从实验数据到传递函数的估计方法4.1.3 传递函数建模的示例4.2 状态空间法4.2.1 状态空间模型的定义和性质4.2.2 状态空间模型的建立方法4.2.3 状态空间建模的示例4.3 基于仿真数据的建模方法4.3.1 仿真数据的获取和处理4.3.2 仿真数据建模的步骤4.3.3 仿真数据建模的示例第五章:模型的验证与调整5.1 信号的响应分析5.2 参数的优化和调整5.3 模型的准确性评估5.4 系统建模的误差分析第六章:案例分析6.1 控制系统的建模6.1.1 PID控制系统的建模方法6.1.2 模型预测控制系统的建模方法6.1.3 自适应控制系统的建模方法6.2 通信系统的建模6.2.1 数字调制解调系统的建模方法6.2.2 无线信号传输系统的建模方法6.2.3 混合信号处理系统的建模方法第七章:Simulink在实际工程中的应用7.1 电力系统的建模和分析7.2 汽车动力系统的建模和仿真7.3 机器人控制系统的建模和优化7.4 信号处理系统的建模和算法实现结语:Simulink在系统建模中的应用前景及启示。

simulink建模及动态仿真的一些实验步骤Simulink是MATLAB中的一种可视化仿真工具,可以用于动态系统建模、仿真和分析。
以下是一些Simulink建模及动态仿真的实验步骤:启动Simulink:首先,需要打开MATLAB,然后在MATLAB 的命令窗口中输入“simulink”命令,或者点击工具栏中的Simulink 图标来启动Simulink。
新建模型:在Simulink的启动界面中,可以选择“Blank Model”来新建一个空白的模型。
也可以选择其他预设的模型模板来开始建模。
构建系统模型:在新建的模型窗口中,可以通过从Simulink 的模块库中拖拽模块到模型窗口中来构建系统模型。
模块库中包含了各种类型的模块,如源模块、接收模块、处理模块等。
将这些模块按照系统的结构和功能连接起来,形成一个完整的系统模型。
设置模块参数:对于模型中的每个模块,都可以双击打开其参数设置对话框,设置其参数和初始条件。
这些参数和初始条件将决定模块在仿真中的行为。
设置仿真参数:在模型窗口的工具栏中,可以点击“Simulation”->“Model Configuration Parameters”来打开仿真参数设置对话框。
在这个对话框中,可以设置仿真的起始和结束时间、仿真步长、求解器类型等参数。
开始仿真:完成以上步骤后,可以点击模型窗口工具栏中的“Run”按钮来开始仿真。
在仿真过程中,可以实时观察模型中各个模块的状态和输出。
分析结果:仿真结束后,可以使用Simulink提供的各种分析工具来分析仿真结果。
例如,可以使用示波器模块来显示仿真过程中某个模块的输出波形,也可以使用MATLAB的工作空间来查看和处理仿真数据。
以上步骤是一个基本的Simulink建模和动态仿真的过程。
在实际使用中,可能还需要根据具体的需求和系统特点进行一些额外的设置和调整。
simulink微分方程建模概述在控制系统设计中,微分方程建模是一项重要的任务。
Simulink是一款功能强大的工具,可用于构建和仿真动态系统模型。
本文将介绍如何使用Simulink进行微分方程建模,并分析模型的性能和稳定性。
为什么选择SimulinkSimulink是一种图形化建模环境,可以帮助工程师以图形方式快速描述系统行为,并自动生成相应的微分方程模型。
相比传统的手工推导模型,在Simulink中进行建模更加直观、简单、高效。
此外,Simulink还提供了丰富的工具和算法用于模型分析和优化。
Simulink建模流程步骤一:创建模型在Simulink中,首先需要创建一个新的模型。
可以通过在空白Simulink窗口中右键单击并选择“新建模型”来创建一个空模型。
步骤二:添加系统组件在模型中添加所需的系统组件,如信号源、传感器、执行器等。
可以从Simulink库浏览器中拖拽并放置这些组件。
步骤三:建立连接通过使用连接线将系统组件连接到模型中的其他组件。
连接线代表信号流动的路径。
步骤四:配置组件参数对于每个系统组件,需要配置其相应的参数。
可以通过双击组件并在参数对话框中进行设置。
步骤五:编写微分方程在模型中的某些组件上,需要编写微分方程来描述其动态行为。
可以通过两种方式完成: 1. 使用已有的数学表达式:可以直接在组件的参数框中输入数学表达式。
Simulink将自动将其转换为微分方程。
2. 使用Stateflow图表:Stateflow是Simulink的一个扩展工具,用于建模离散事件系统。
可以使用Stateflow图表绘制微分方程。
步骤六:运行仿真完成模型搭建后,可以开始进行仿真了。
点击Simulink界面上的“运行”按钮,Simulink将自动执行模型并显示输出结果。
模型分析与优化分析信号响应Simulink可以显示模型中的信号响应,如系统的步响应、频率响应等。
通过分析这些响应,可以评估系统的性能是否符合要求,并进行调整优化。
Simulink建模在Simulink中,代表并模拟代表一个物理系统的数学模型是非常简单的。
模型在Simulink模块图,以图形方式表示的。
对以用户来说很多模块是可用的,simulink提供较多种格式的各种现象和模型库。
应用Simulink分析动态系统的一个主要优点是使我们能够快速分析复杂的系统的可能比登天还难解析分析的响应。
Simulink能够进行数值近似解,对于我们不能或不愿动手得到数学的模型。
一般来说,数学方程代表一个给定的系统,以此为基础Simulink模型可以从物理定律推导。
在这节中,我们将演示如何推导出一个数学模型,然后没实现Simulink建模。
该模型将在Simulink Control中演示如何使用Simulink的设计和模拟控制系统的目录•列车系统•受力图和牛顿第二定律•Simulink建模•运行模型列车系统在这个例子中,我们将考虑一个玩具火车,包括发动机和车身。
假设没有火车前进只在一维(沿轨道)。
我们应用控制在火车上,以至于它能平缓的开始和停止,以至于他们能以存在一个很小的稳态误差的速度前进。
发动机和车身的质量分别表示为,。
进一步,在发动机和汽车通过耦合连接,刚性为k。
换句话说,连接被建模为一个弹簧常数k的弹簧。
力F表示发动机的车轮与轨道之间产生的力,而表示滚动摩擦系数。
受力图和牛顿第二定律建立物理系统的数学方程的第一步是画系统的受力图。
火车系统的受力图如下:从牛顿第二定律,我们知道物体受力的和等于质量与加速度的乘积。
既滚动摩擦力然这样。
发动机受到水平方向的力为弹簧弹力和车轮与轨道之间产生的滚动摩擦力。
车身受到的水平方向的力,为弹簧弹力与滚动摩擦力。
在垂直方向,重力平衡了地面的弹力。
因此,将没有垂直方向的加速度。
我们建模弹簧产生了一个由于变形线性比例的弹力,,,分别是发动机和车身的位移。
在这假设如果弹簧没有变形的话,,等于零。
滚动摩擦力建模为与速度和弹力(等于重力)的乘积是线性比例关系。
simulink数学公式建模(最新版)目录1.Simulink 简介2.Simulink 与数学公式建模3.Simulink 建模步骤4.Simulink 建模实例5.Simulink 在数学公式建模中的优势与局限正文一、Simulink 简介Simulink 是一款由 MathWorks 公司开发的与 MATLAB 兼容的仿真环境,主要用于动态系统的建模、仿真和分析。
用户可以利用 Simulink 提供的丰富函数库和图形化界面,轻松地搭建和修改模型。
二、Simulink 与数学公式建模Simulink 在数学公式建模领域具有广泛的应用。
用户可以在Simulink 中直接编写 MATLAB 数学公式,还可以通过拖拽式的操作完成复杂数学公式的建模。
这使得 Simulink 在数学公式建模过程中既具有高度的灵活性,又降低了建模的难度。
三、Simulink 建模步骤1.打开 Simulink 软件,创建一个新的模型。
2.从 Simulink 函数库中选择适当的函数模块,根据需要搭建系统模型。
3.添加 MATLAB 数学公式,可以通过点击工具栏中的“New Math Function”按钮实现。
4.将建好的模型进行仿真,通过观察仿真结果来验证模型的正确性。
5.根据需要调整模型参数,以满足不同问题的求解需求。
四、Simulink 建模实例以一个简单的一阶 RC 电路为例,我们可以通过 Simulink 进行数学公式建模。
首先,在 Simulink 中添加电阻和电容元件,然后添加一个电压源。
接下来,使用 MATLAB 数学公式建立电路的微分方程,最后进行仿真,可以得到电路的电压 - 时间曲线。
五、Simulink 在数学公式建模中的优势与局限优势:1.Simulink 具有丰富的函数库,可以满足各种建模需求。
2.图形化界面使得建模过程更加直观、便捷。
3.可以直接编写 MATLAB 数学公式,便于实现复杂数学模型。