汽车级Simulink建模与仿真.
- 格式:doc
- 大小:2.53 MB
- 文档页数:23
基于simulink汽车速度控制系统的设计与仿真摘要:目前许多汽车把汽车速度控制系统作为配属设备或选配设备。
汽车装有汽车速度控制系统后,当驾驶员启动这一装置并进行一些简单的设置后,该装置可自动保持某一恒定速度行驶,而不踩油门。
由于电子系统能准确地控制车辆的速度,从而使高速行驶的车辆更加安全、平稳。
在文中,首先对汽车的运动原理进行分析,建立控制系统简化模型,根据研究对象的物理特性建立起汽车速度控制控制系统的微分方程,再将该微分方程进行线性化处理,运用PID控制理论的方法对汽车速度控制控制系统进行分析和控制。
然后对汽车速度控制系统进行设计分析,在已有的模型下,对设计的汽车速度控制系统进行Matlab语言仿真。
关键词:速度控制系统PID控制仿真指导老师签名:Design and Simulation of the vehicle speedcontrol systemStudent name Class:Supervisor:Abstract:At present, many cars make car speed control system as an attachment device or optional equipment. The car is fitted with the motor speed control system, when the driver start the device and make some simple settings, the device can automatically maintain a constant speed, and do not step on the accelerator. Because the electronic system can accurately control the speed of the vehicle, so that the high-speed vehicles more secure, stable.In this paper, the first principle of the movement of automobile is analyzed, establishing control system is simplified model, based on physical characteristics of the research object to establish the vehicle speed control differential equation of the control system, then the differential equation is linearized by using the method of control theory, analyze and control the motor speed control system. Then the design of the vehicle speed control system, the existing model, to design vehicle speed control system simulation language Matlab.Keyword:Speed control system PID control simulationSignature of Supervisor:目录1绪论 (1)1.1选题的依据及课题意义 (1)1.2汽车速度控制研究概况及发展趋势 (1)2速度控制系统的简述 (3)2.1汽车速度控制系统原理 (3)2.2速度控制系统的分类 (3)2.3速度控制系统的基本用途 (4)2.4电子式多功能速度控制系统功能 (4)3系统模型建立及性能分析 (6)3.1汽车受力分析 (6)3.2行驶汽车仿真模型 (7)3.3 动态性能和稳态性能指标 (8)4 PID控制器 (10)4.1 PID控制简述 (10)4.2 PID控制规律 (10)4.3 PID作用分析 (14)5 系统仿真及结果分析 (15)5.1 SIMULINK简介 (15)5.2实验方案选择 (15)5.2.1采用P控制 (15)5.2.2采用PI控制 (20)5.2.3采用PID控制 (22)5.3实验结果分析 (25)总结 (26)参考文献 (27)致谢 (28)1绪论1.1选题的依据及课题意义随着汽车工业和公路运输业的发展,汽车将走进千家万户,驾驶人员非职业化的特点将突出,车辆驾驶的自动化己成为汽车发展的主要趋势。
基于CarsimSimulink联合仿真的分布式驱动电动汽车建模一、本文概述随着电动汽车技术的快速发展,分布式驱动电动汽车(Distributed Drive Electric Vehicles, DDEV)因其高效能源利用、优越操控性能以及灵活的驱动方式,正逐渐成为新能源汽车领域的研究热点。
为了更深入地理解和研究DDEV的动态特性与控制策略,建立精确的车辆模型是关键。
本文旨在探讨基于Carsim与Simulink 联合仿真的分布式驱动电动汽车建模方法,以期在车辆动力学建模、控制策略优化和系统集成等方面提供有效的技术支撑。
本文首先介绍分布式驱动电动汽车的基本结构和特点,阐述其相较于传统车辆的优势。
随后,详细介绍Carsim和Simulink两款软件在车辆建模和仿真分析方面的功能和特点,以及它们联合仿真的优势。
接着,将重点介绍如何利用Carsim建立DDEV的车辆动力学模型,包括车辆动力学方程、轮胎模型、驱动系统模型等。
将探讨如何利用Simulink构建DDEV的控制策略模型,包括驱动控制、制动控制、稳定性控制等。
在建立了DDEV的车辆动力学模型和控制策略模型后,本文将详细阐述如何将这两个模型进行联合仿真,并分析仿真结果。
通过对比分析不同控制策略下的车辆性能表现,验证所建模型的准确性和有效性。
本文还将讨论分布式驱动电动汽车建模面临的挑战和未来的研究方向,为相关领域的研究者提供参考和借鉴。
二、Carsim软件介绍Carsim是一款由密歇根大学开发的高级车辆动力学仿真软件,广泛应用于车辆控制、车辆动力学、主动和被动安全、电动和混合动力车辆以及先进的驾驶员辅助系统等领域的研究和开发。
该软件以模块化的方式集成了车辆各个子系统的动力学模型,包括发动机、传动系统、制动系统、转向系统、悬挂系统、轮胎以及车身等。
Carsim的核心优势在于其强大的物理引擎和精确的仿真能力。
通过精确的算法和详尽的车辆参数数据库,Carsim能够模拟出车辆在各种道路条件和驾驶操作下的动态行为,如加速、制动、转向、侧滑等。

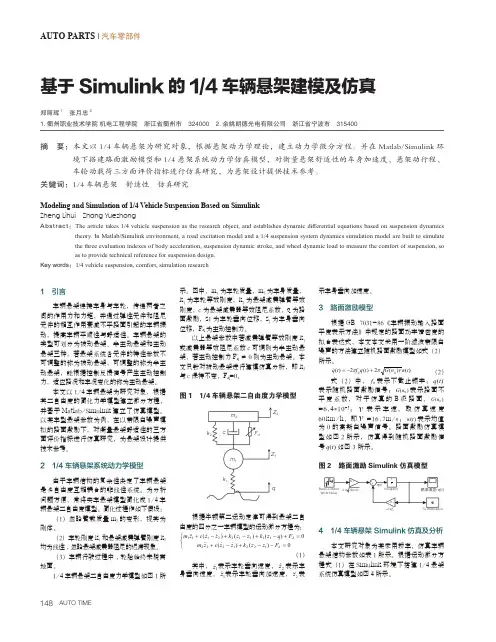
AUTO PARTS | 汽车零部件基于Simulink的1/4车辆悬架建模及仿真郑丽辉1 张月忠21.衢州职业技术学院 机电工程学院 浙江省衢州市 3240002.余姚朗德光电有限公司 浙江省宁波市 315400摘 要: 本文以1/4车辆悬架为研究对象,根据悬架动力学理论,建立动力学微分方程。
并在Matlab/Simulink环境下搭建路面激励模型和1/4悬架系统动力学仿真模型,对衡量悬架舒适性的车身加速度、悬架动行程、车轮动载荷三方面评价指标进行仿真研究,为悬架设计提供技术参考。
关键词:1/4车辆悬架 舒适性 仿真研究1 引言车辆悬架连接车身与车轮,传递两者之间的作用力和力矩,并通过弹性元件和阻尼元件的相互作用衰减不平路面引起的车辆振动,提高车辆平顺性与舒适性。
车辆悬架的类型可划分为被动悬架、半主动悬架和主动悬架三种,若悬架系统各元件的特性参数不可调整的称为被动悬架,可调整的称为半主动悬架,能根据控制反馈信号产生主动控制力,适应路况和车况变化的称为主动悬架。
本文以1/4车辆悬架为研究对象,根据其二自由度的简化力学模型建立微分方程,并基于Matlab/Simulink建立了仿真模型。
以某车型悬架参数为例,在以带限白噪声模拟的路面激励下,对衡量悬架舒适性的三方面评价指标进行仿真研究,为悬架设计提供技术参考。
2 1/4车辆悬架系统动力学模型由于车辆结构的复杂性决定了车辆悬架是多自由度互相耦合的非线性系统。
为分析问题方便,常将实车悬架模型简化成1/4车辆悬架二自由度模型。
简化过程作如下假设:(1)忽略簧载质量m2的变形,视其为刚体。
(2)车轮刚度k1和悬架减震弹簧刚度k2均为线性,忽略悬架减震器阻尼的迟滞现象。
(3)车辆行驶过程中,轮胎始终未脱离地面。
1/4车辆悬架二自由度力学模型如图1所示。
图中,m1为车轮质量,m2为车身质量,k1为车轮等效刚度,k2为悬架减震弹簧等效刚度,c为悬架减震器等效阻尼系数,q为路面激励,z1为车轮垂向位移,z2为车身垂向位移,Fd为主动控制力。

基于MatlabSimulink的电动汽车仿真模型设计与应用一、本文概述随着全球能源危机和环境污染问题的日益严重,电动汽车作为一种清洁、高效的交通工具,受到了越来越多的关注和推广。
在电动汽车的研发过程中,仿真模型的建立与应用发挥着至关重要的作用。
本文旨在探讨基于Matlab/Simulink的电动汽车仿真模型设计与应用,旨在为电动汽车的设计、优化和控制提供理论支持和实践指导。
本文将对电动汽车仿真模型的重要性进行阐述,指出其在电动汽车研发过程中的地位和作用。
接着,将详细介绍Matlab/Simulink在电动汽车仿真模型设计中的应用,包括其强大的建模功能、灵活的仿真能力以及高效的算法处理能力等。
在此基础上,本文将重点讨论电动汽车仿真模型的设计方法。
包括电动汽车动力系统的建模、控制系统的建模以及整车模型的集成等。
将结合具体案例,对电动汽车仿真模型在实际应用中的效果进行展示和分析,以验证其有效性和可靠性。
本文还将对电动汽车仿真模型的发展趋势进行展望,探讨其在未来电动汽车研发中的潜在应用前景。
通过本文的研究,希望能够为电动汽车仿真模型的设计与应用提供有益的参考和启示,推动电动汽车技术的不断发展和进步。
二、电动汽车仿真模型设计基础电动汽车(EV)仿真模型的设计是一个涉及多个学科领域的复杂过程,其中包括电力电子、控制理论、车辆动力学以及计算机建模等。
在Matlab/Simulink环境中,电动汽车仿真模型的设计基础主要包括对车辆各子系统的理解和建模,以及如何利用Simulink提供的各种模块和工具箱进行模型的构建和仿真。
电动汽车的主要子系统包括电池管理系统(BMS)、电机控制系统(MCS)、车辆控制系统(VCS)以及车辆动力学模型。
这些子系统都需要根据实际的电动汽车设计和性能参数进行精确的建模。
电池管理系统(BMS)建模:电池是电动汽车的能源来源,因此,BMS建模对于电动汽车的整体性能至关重要。
BMS模型需要包括电池的荷电状态(SOC)估计、电池健康状况(SOH)监测、电池热管理以及电池能量管理等功能。
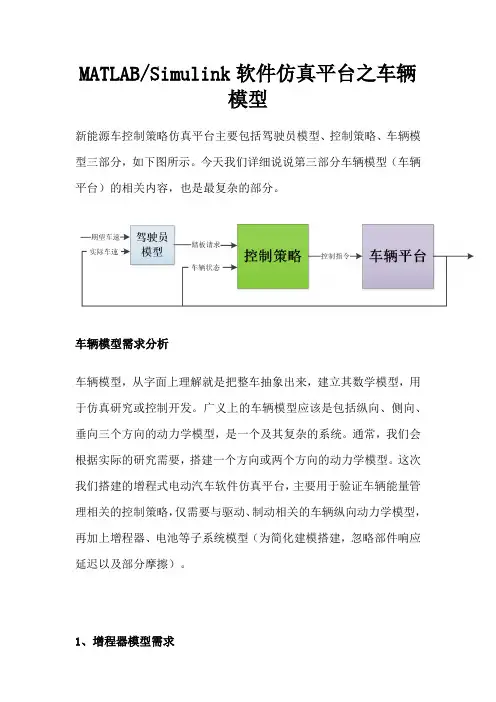
MATLAB/Simulink软件仿真平台之车辆模型新能源车控制策略仿真平台主要包括驾驶员模型、控制策略、车辆模型三部分,如下图所示。
今天我们详细说说第三部分车辆模型(车辆平台)的相关内容,也是最复杂的部分。
车辆模型需求分析车辆模型,从字面上理解就是把整车抽象出来,建立其数学模型,用于仿真研究或控制开发。
广义上的车辆模型应该是包括纵向、侧向、垂向三个方向的动力学模型,是一个及其复杂的系统。
通常,我们会根据实际的研究需要,搭建一个方向或两个方向的动力学模型。
这次我们搭建的增程式电动汽车软件仿真平台,主要用于验证车辆能量管理相关的控制策略,仅需要与驱动、制动相关的车辆纵向动力学模型,再加上增程器、电池等子系统模型(为简化建模搭建,忽略部件响应延迟以及部分摩擦)。
1、增程器模型需求增程器主要包括发动机、发电机,二者一般直连在一起,构成一个提供电能的增程器。
发动机启动过程中,发电机出正扭矩把发动机拉到点火转速后,发动机自行点火启动;发动机启动成功后,发动机出正扭矩,发电机出负扭矩发电同时维持发动机转速恒定;发动机停机过程中,发动机和发电机停止出力,在发动机摩擦力的作用下发动机转速会慢慢降为0。
增程器模型输入:发动机扭矩请求(来自控制策略,这里用固定的节气门开度近似代替)发电机扭矩请求(来自控制策略,这里用扭矩请求百分比信号近似代替)高压电池电压(来自高压电池实际状态)。
增程器模型输出;发电机充放电电流(充电为负,放电为正)模型物理关系:发动机实际扭矩=MAP1(发动机实际转速,发动机节气门开度)发电机实际扭矩=MAP2(发电机实际转速)* 发电机扭矩请求百分比发动机转速(即发电机转速)由增程器系统的动力学决定,TENG+TGM=(JENg+JGM)*dw/dt发电机充放电电流由功率守恒计算,充电时TGM*WGM*φ=UBATT*IGM,放电时TGM*WGM/φ=UBATT*IGM2、纵向动力学模型需求增程式电动汽车的纵向动力学模型与纯电车一样,由电机、主减速器、轮胎、车身等。
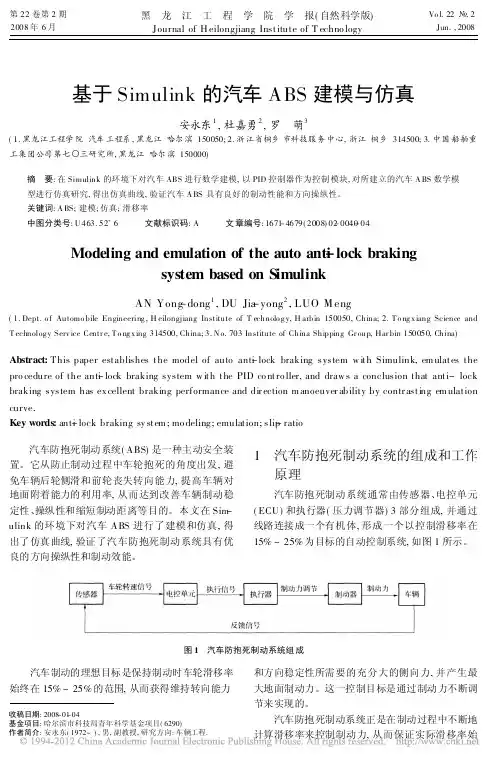
第22卷第2期 黑 龙 江 工 程 学 院 学 报(自然科学版) Vo l.22l .22008年6月Journal of H eilongjiang Institute of T echno logyJun.,2008基于Simulink 的汽车ABS 建模与仿真安永东1,杜嘉勇2,罗 萌3(1.黑龙江工程学院汽车工程系,黑龙江哈尔滨150050;2.浙江省桐乡市科技服务中心,浙江桐乡314500;3.中国船舶重工集团公司第七o 三研究所,黑龙江哈尔滨150000)摘 要:在Simulink 的环境下对汽车ABS 进行数学建模,以PID 控制器作为控制模块,对所建立的汽车A BS 数学模型进行仿真研究,得出仿真曲线,验证汽车A BS 具有良好的制动性能和方向操纵性。
关键词:A BS;建模;仿真;滑移率中图分类号:U 463.52+6 文献标识码:A 文章编号:1671-4679(2008)02-0040-04Modeling and emulation of the auto ant-i lock brakingsystem based on SimulinkAN Yong -dong 1,DU Jia -yong 2,LUO M eng(1.Dept.o f Automo bile Engineering ,H eilongjiang Institute of T echnolo g y,H arbin 150050,China;2.T o ng x iang Science and T echnolog y Serv ice Centr e,T o ng x ing 314500,China;3.N o.703Institute of China Shipping Gr oup,Har bin 150050,China)Abstract:This paper establishes the model of auto ant-i lock braking system w ith Simulink,em ulates the pro cedure of the ant-i lock braking system w ith the PID co ntro ller,and draw s a conclusion that anti-lock braking system has ex cellent braking performance and dir ection m anoeuver ability by contr asting em ulation curve.Key words:ant-i lock braking sy stem ;mo deling ;emulation;slip -ratio 收稿日期:2008-01-04基金项目:哈尔滨市科技局青年科学基金项目(6290)作者简介:安永东(1972~),男,副教授,研究方向:车辆工程.汽车防抱死制动系统(ABS)是一种主动安全装置。
基于Simulink的四轮独立驱动电动汽车建模Simulink是MATLAB的一个工具箱,用于建模和仿真系统。
基于Simulink的四轮独立驱动电动汽车建模,需要先了解电动汽车的原理和模型。
一个基本的电动汽车模型包括电池模型、电机模型、电子控制模型和机械传动模型。
首先,我们需要确定模型的输入和输出变量。
四轮独立驱动电动汽车的输入变量为电池电压、电机控制命令、转向角度和制动力;输出变量为车辆速度、车辆位置和车辆加速度。
在Simulink中,我们可以将这些变量表示为信号线,并使用不同的模块进行处理。
电动汽车建模的主要步骤如下:1. 电池模型建立:根据电池的特性,选择最适合的电池模型。
一般使用RC等效电路和电化学模型。
2. 电机模型建立:根据电机的特性,选择最适合的电机模型。
一般使用等效电路和磁路分析法。
3. 电子控制模型建立:根据电机控制器的特性,选择最适合的控制器模型。
一般使用PID控制器或者FOC(Field Oriented Control)控制器。
4. 机械传动模型建立:根据车辆传动系统的特性,选择最适合的传动模型。
一般使用能量守恒法和马力平衡法。
5. 系统集成和模拟:将上述模型集成到一个系统模型中,并进行模拟。
在模拟过程中,我们可以通过调整模型参数和仿真条件,对车辆性能进行分析和优化。
同时,还可以添加故障和异常情况进行仿真,以提高电动汽车的鲁棒性和安全性。
总之,基于Simulink的四轮独立驱动电动汽车建模是一个复杂而有趣的过程,需要深入理解电动汽车的原理和模型,才能构建准确、可靠的模型。
carsim建模仿真手册一、引言Carsim(Car Simulation)是一个用于汽车动力学仿真的软件。
它提供了一个精确且强大的模型,可用于模拟汽车的动态行为。
本文档旨在提供使用Carsim进行建模仿真的基本指南。
二、Carsim介绍Carsim是由意大利的Simulink和MathWorks公司共同开发的。
它基于Simulink平台,允许用户使用图形界面进行建模和仿真。
Carsim提供了丰富的车辆模型库,包括车辆动力学、轮胎模型、驾驶员模型等,使得用户能够快速构建复杂的车辆系统模型。
三、建模步骤1.建立车辆模型:首先,需要在Carsim中定义车辆的几何形状、质量和惯性等参数。
这些参数对于车辆的动力学行为至关重要。
2.添加轮胎模型:轮胎是车辆与地面接触的关键部分,其行为对车辆的操控性和稳定性有重要影响。
Carsim提供了多种轮胎模型,用户可以根据需要选择和调整。
3.定义驾驶员模型:驾驶员模型用于模拟驾驶员的驾驶行为,如加速、制动和转向等。
Carsim提供了多种驾驶员模型,用户可以根据实际需求进行选择和调整。
4.连接模型:将上述各个部分连接起来,形成一个完整的车辆系统模型。
连接时需确保所有输入和输出信号的一致性。
四、仿真与结果分析1.运行仿真:设置仿真参数,如仿真时间、步长等,然后开始仿真。
2.查看仿真结果:仿真结束后,可以查看各种输出数据,如速度、加速度、横摆角速度等。
这些数据可以用于评估车辆的性能和操控性。
3.结果分析:根据仿真结果,可以对车辆的设计进行优化。
例如,调整轮胎参数或驾驶员模型参数,以改善车辆的操控性或燃油经济性。
五、结论Carsim为汽车动力学建模仿真提供了一个强大的工具。
通过遵循上述步骤,用户可以快速构建复杂的车辆系统模型,并进行仿真和分析。
这对于车辆设计、开发和测试具有重要意义。