[整理]matlab二自由度系统振动.
- 格式:doc
- 大小:521.50 KB
- 文档页数:10
Science and Technology &Innovation ┃科技与创新2020年第17期·67·文章编号:2095-6835(2020)17-0067-03基于MATLAB 的二自由度和四自由度汽车振动模型分析金琦珺,罗骞*(武汉理工大学汽车工程学院,湖北武汉430070)摘要:以普通乘用车为例,将汽车简化成独立悬架整车二自由度与四自由度动力学模型,根据牛顿第二定律求出系统的运动微分方程,并利用MATLAB 研究了汽车振动的频率响应特性,求解得到该振动系统的固有频率和各主振型,绘制出车身、前后轴振动对前后轮激励的频率响应曲线图。
并着重研究了轮胎阻尼对汽车平顺性的影响。
该研究能够对减轻汽车振动及提高汽车行驶平顺性提供一定有益的参考。
关键词:MATLAB ;二自由度:四自由度;自由振动中图分类号:TH701文献标识码:A DOI :10.15913/ki.kjycx.2020.17.0261引言机械振动对于人类的生产生活来说是一把双刃剑,既可以服务于人类,又对人类的生产活动有重大危害。
机械振动既有有利的一面也有有害的一面。
需对振动进行动态分析,通过研究物体偏离平衡位置的位移、速度、加速度等的动态变化来达到目的。
在物体的平衡点附近出现的物体的来回运动,有线性和非线性两种振动模式。
由于外界对系统的激励或作用,使得机械设备产生噪声及有损于机械结构的动载荷,从而影响设备的工作性能和寿命。
尤其是发生共振情况时,可能使机器设备受到损坏,所以急需对机械振动的相关原理进行研究。
为了合理减小振动对设备的危害,充分利用振动进行机器运作,对机械振动产生的规律进行了探讨和研究。
随着计算机智能系统的快速发展,相关的仿真技术都出现了极大的提升空间,在日常的生产活动中,人们经常用到的相关软件有adams 、abaqus 等。
目前MATLAB 计算机软件在计算机的仿真方面使用更加广泛一些,MATLAB 是一款拥有强大绘图能力的工程计算高级计算机语言。
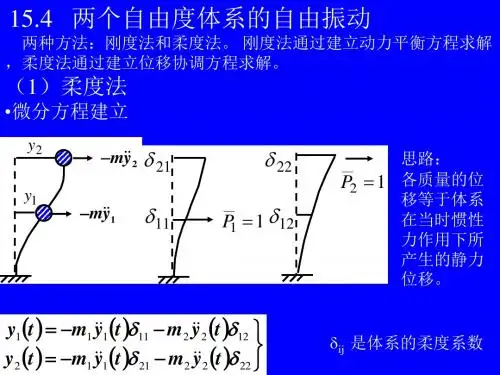
第四章 两自由度系统的振动前两章介绍了单自由度系统的振动,它是振动理论的基础,并有重要的应用价值。
但工程中许多实际问题是不能简化为单自由度系统的振动问题,它们往往需要简化成为多自由度系统。
两自由度系统是最简单的多自由度系统,无论是模型的简化、振动微分方程的建立和求解的一般方法,以及系统响应表现出来的振动特性等等。
两自由度系统和多自由度系统没有本质上的差别,而主要是量上的差别,因此研究两自由度系统是分析多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
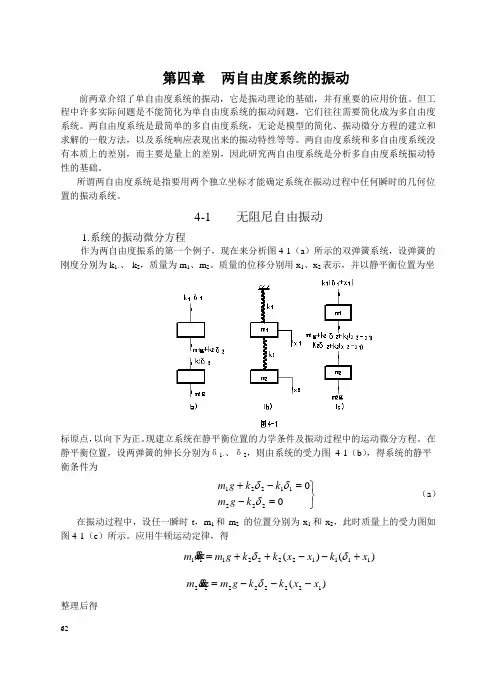
4-1 无阻尼自由振动1.系统的振动微分方程作为两自由度振系的第一个例子,现在来分析图4-1(a )所示的双弹簧系统,设弹簧的刚度分别为k 1、、 k 2,质量为m 1、m 2。
质量的位移分别用x 1、x 2表示,并以静平衡位置为坐标原点,以向下为正。
现建立系统在静平衡位置的力学条件及振动过程中的运动微分方程。
在静平衡位置,设两弹簧的伸长分别为δ1、、δ2,则由系统的受力图 4-1(b ),得系统的静平衡条件为⎭⎬⎫=-=-+0022211221δδδk g m k k g m (a )在振动过程中,设任一瞬时t ,m 1和m 2 的位置分别为x 1和x 2,此时质量上的受力图如图4-1(c )所示。
应用牛顿运动定律,得)()(11112222111x k x x k k g m x m +--++=δδ )(12222222x x k k g m xm ---=δ 整理后得222122222112212212111)(δδδk g m x k x k x m k k g m x k x k k xm -=-+-+=-++ } (b )将方程(b )的右端和方程(a)比较,就可以消去平衡项,于是得00)(1222222212111=-+=-++x k x k xm x k x k k xm } (4-1)令 ,/,/,/)(2222121m k c m k b m k k a ==+=则(4-1)式可改写成00122211=-+=-+cx cx xbx ax x } (4-2)这是联立的二阶常系数线性微分方程组。
基于Matlab 的两自由度振动系统模拟实验报告一、 实验目的1、 深入了解两自由度振动系统的模态正交性。
2. 掌握Matlab 编程基本语言和两自由度系统的响应模态求解方法。
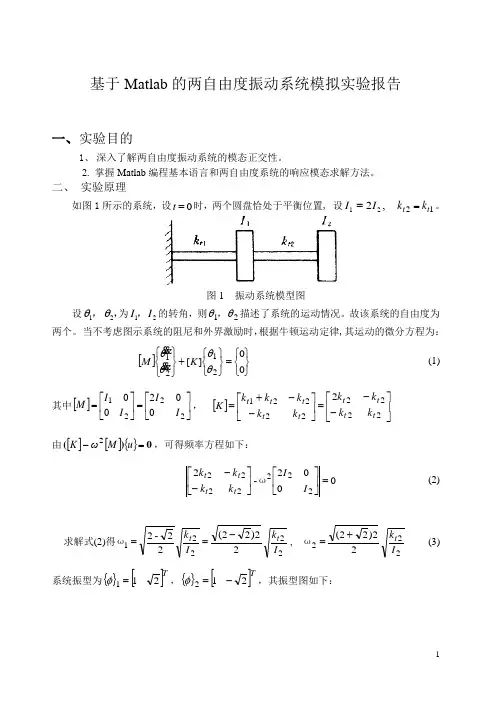
二、 实验原理如图1所示的系统,设0=t 时,两个圆盘恰处于平衡位置, 设,221I I =2t t k k =。
图1 振动系统模型图设,,21θθ为21I I ,的转角,则21θθ,描述了系统的运动情况。
故该系统的自由度为两个。
当不考虑图示系统的阻尼和外界激励时,根据牛顿运动定律,其运动的微分方程为:[]⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧00][2121θθθθK M(1)其中[]⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=222100200I I I I M ,]⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡--+=2222222212t t t t t t t t t k k k k k k k k k K 由[][]{}0)(=-u M ωK 2,可得频率方程如下:0002-22222222=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡--I I k k k k t t t t ω (2)求解式(2)得2222122)22(22-2I k I k t t -==ω, 22222)22(I k t +=ω (3)系统振型为{}[]T 211=φ,{}[]T 212-=φ,其振型图如下:图2 系统振型图令{}{}⎥⎦⎤⎢⎣⎡-==Φ2211],[][21φφ, 则 ⎥⎦⎤⎢⎣⎡=ΦΦ10014][][][2I M T, ⎥⎥⎦⎤⎢⎢⎣⎡=ΦΦ22212004][][][ωωI K T (4)式(4)为振动系统的模态正交特性。
当考虑图1系统的外界激励时,即{}t F F F ωsin 21⎭⎬⎫⎩⎨⎧=时,其运动的微分方程为: []t F F K M ωθθθθsin ][212121⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧+⎭⎬⎫⎩⎨⎧ (5)为了求出方程(5)的稳态解,可令⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ,将⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ代入式(5),同时方程两边同乘以T ][Φ,并利用振动系统的模态正交特性,有t I F F I F F q q qq ωωωsin )4/()2()4/()2(0022122121222121⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-+=⎭⎬⎫⎩⎨⎧⎥⎥⎦⎤⎢⎢⎣⎡+⎭⎬⎫⎩⎨⎧(6)利用式(6)很容易求得t I F F I F F q q Tωωωωωsin ))4/()2(,)4/()2((22222122122121---+=⎭⎬⎫⎩⎨⎧, 再由⎭⎬⎫⎩⎨⎧Φ=⎭⎬⎫⎩⎨⎧2121][q q θθ求得⎭⎬⎫⎩⎨⎧21θθ。
![[整理]matlab二自由度系统振动.](https://uimg.taocdn.com/76298ee0c1c708a1284a4482.webp)
利用Adams 和Matlab 对二自由度系统振动进行仿真与分析一、实验思想Adams 是一种可以对一些典型运动进行高效仿真的软件,本实验是利用Adams 对二自由度系统振动进行仿真及分析,再和理论公式对比,并用另外一种常见的仿真软件Matlab 的仿真结果进行对比,观察两者的差异,分析软件仿真产生差异的原因,加深对二自由度系统振动的理解。
二、二自由度系统振动分析固有频率取决于系统本身物理性质,而与初始条件无关。
对于二自由度的振动系统是有两种频率的简谐波组成的复合运动,这两个频率都是系统的固有频率。
主振型是当系统按固有频率作自由振动时,称为主振动。
系统作主振动时,任何瞬时各个运动坐标之间具有一定的相对比值,即整个系统具有确定的振动形态,称为主振型。
强迫振动是振动系统在周期性的外力作用下,其所发生的振动称为强迫振动,这个周期性的外力称为驱动力。
三、二自由度系统自由振动1.建立二自由度系统振动模型1)创建底座:先生成一个尺寸合适的长方体基体,再使用add to part 指令创建底座的侧壁。
2)使用new part 指令分别创建两个滑块,创建滑块时应注意滑块与滑块、滑块与侧壁之间的尺寸适当。
3)弹簧连接:分别用弹簧链接滑块、侧壁的中心点。
弹簧生成后,依次选中弹簧,在modify 选项中的stiffness and damping 下拉菜单中将damping coefficient 设置成no damping,即弹簧无阻尼。
添加约束:底座和地面固定,滑块和底座用滑动副连接。
弹簧刚度分别改为1、1、2(newton/mm)滑块质量分别为1.0 2.0滑块与机体滑动副的阻尼改为1.0E-0072.模型展示3.运动仿真结果设置x10=12经过Adams 运算后,滑块1、2 运动状态如图所示:4.matlab验证程序:k1=1000;k2=1000;k3=2000;m1=1;m2=2;a=(k1+k2)/m1;b=k2/m1;c=k2/m2;d=(k2+k3)/m2;[x1x2]=dsolve('D2x1+2000*x1-1000*x2=0','2*D2x2-1000*x1+3000*x2=0','x 1(0)=0.012','x2(0)=0','Dx1(0)=0','Dx2(0)=0','t')t1=0:0.01:2;;x1=subs(x1,'t',t1);x2=subs(x2,'t',t1);figureplot(t1,x1,'-');title('系统响应x(1)曲线');xlabel('时间/s');ylabel('位移/m');figureplot(t1,x2,'-');title('系统响应x(2)曲线');xlabel('时间/s');ylabel('位移/m');计算结果:5.结果分析存在差异的原因是Adams 仿真中并没有完全忽略摩擦力,而Matlab 计算时没有考虑摩擦,故存在差异,但是在允许范围内。
两自由度振动系统是一个经典的物理学问题,它描述了两个质点在受到某种力的作用下进行复杂振动的情况。
在工程和物理学领域,研究两自由度振动系统可以帮助我们更好地理解和控制实际系统中的振动现象,比如建筑结构、机械系统和电路等。
而利用Matlab来模拟和分析两自由度振动系统,可以更直观地展现系统的运动规律和特性。
让我们来定义一个经典的两自由度振动系统。
假设有两个质点$m_1$和$m_2$,它们分别位于$x_1$和$x_2$的位置上,通过弹簧和阻尼器相连接。
系统中存在的力包括弹簧力、阻尼力和外力,而质点的运动受到这些力的综合作用而产生振动。
我们可以利用Newton力学原理建立方程来描述系统的运动。
对于一个给定的两自由度振动系统,我们可以通过编写Matlab代码来模拟其振动过程。
在Matlab中,我们可以利用ODE求解器来求解系统的微分方程,从而得到系统的位置随时间的变化。
通过改变系统的参数和初始条件,我们可以观察到系统的不同运动模式和特性。
另外,Matlab还提供了丰富的绘图函数,可以直观地展现系统振动的过程和特性。
当我们编写Matlab代码来模拟两自由度振动系统时,我们需要注意几个关键的步骤。
我们需要建立系统的微分方程模型,这涉及到物理建模和方程的推导。
我们需要选择合适的数值方法和求解器来求解微分方程,比如常见的四阶Runge-Kutta法。
我们可以用Matlab来进行数值模拟,并利用绘图函数来展现系统的振动规律。
我们可以对模拟结果进行分析,比如计算系统的频率响应、模态分析和阻尼比等特性。
对于我个人的观点和理解,两自由度振动系统的分析和模拟在工程和科学研究中具有重要意义。
通过对系统振动特性的研究,我们可以更好地设计和控制实际系统,从而提高系统的性能和稳定性。
而利用Matlab来模拟系统的振动行为,则可以帮助我们更直观地理解系统的动态特性,为工程实践提供有力的支持。
两自由度振动系统是一个具有重要应用价值的物理问题,通过Matlab 代码的编写和模拟分析,我们可以更好地理解和掌握系统的振动特性。
MATLAB(Matrix Laboratory的缩写)是一种用于算法开发、数据分析、数据可视化和数值计算的高级技术计算语言和交互式环境。
它可以帮助工程师和科学家解决各种复杂的数学问题,包括结构分析中的悬臂梁计算。
本文将介绍如何使用MATLAB计算悬臂梁的两自由度振动问题。
1. 悬臂梁的基本概念悬臂梁是一种常见的结构体系,通常用于桥梁、建筑和机械工程中。
在振动分析中,悬臂梁可以看作是一个简化的模型,用于研究结构在外部加载下的动态响应。
悬臂梁的振动问题是一个经典的动力学问题,可以通过数学模型和计算方法求解。
2. 悬臂梁的数学模型悬臂梁的振动可以用一个二自由度的动力学模型描述。
假设梁的自由振动可以沿梁的轴线和横向振动,其中一个自由度对应梁的挠曲振动,另一个自由度对应梁的横向振动。
通过欧拉-伯努利梁理论和牛顿第二定律,可以建立悬臂梁的运动微分方程。
3. 悬臂梁振动计算的MATLAB程序需要定义悬臂梁的结构参数和材料性质,包括梁的长度、截面惯性矩、杨氏模量等。
可以利用MATLAB的ODE函数求解悬臂梁的动力学方程,得到梁的振动响应。
通过绘制振动响应曲线和振动模态图,可以直观地观察梁的振动特性和振型。
4. 示例程序以下是一个简化的MATLAB程序,用于计算悬臂梁的振动响应:```matlabDefine parametersL = 1; Length of cantilever beamE = 210e9; Young's modulusI = 1e-4; Moment of inertiam = 10; Point mass at the free endDefine dynamic modelfun = (t, y) [y(2); 1/(m*L)*(-E*I*y(3)+m*L^2*y(4))];tspan = [0 10];y0 = [0; 0; 1; 0];Solve ODE[t, y] = ode45(fun, tspan, y0);Plot resultssubplot(2,1,1)plot(t, y(:,1), 'b', t, y(:,3), 'r')xlabel('Time')ylabel('Displacement')legend('Axial displacement', 'Transverse displacement')title('Vibration response of cantilever beam')subplot(2,1,2)plot(y(:,1), y(:,3))xlabel('Axial displacement')ylabel('Transverse displacement')title('Vibration mode shape of cantilever beam')```5. 结论通过以上MATLAB程序,可以计算悬臂梁的振动响应,并观察梁的振动模态。
第三章两自由度系统振动§3-1 概述单自由度系统的振动理论是振动理论的基础。
在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。
研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度的振动系统。
例如,车床刀架系统(a)、车床两顶尖间的工件系统(b)、磨床主轴及砂轮架系统(c)。
只要将这些系统中的主要结合面(或芯轴)视为弹簧(即只计弹性,忽略质量),将系统中的小刀架、工件、砂轮及砂轮架等视为集中质量,再忽略存在于系统中的阻尼,就可以把这些系统近似简化成图(d)所示的两自由度振动系统的动力学模型。
以图3.1(c)所示的磨床磨头系统为例分析,因为砂轮主轴安装在砂轮架内轴承上,可以近似地认为是刚性很好的,具有集中质量的砂轮主轴系统支承在弹性很好的轴承上,因此可以把它看成是支承在砂轮架内的一个弹簧——质量系统。
此外,砂轮架安装在砂轮进刀拖板上,如果把进刀拖板看成是静止不动的,而把砂轮架与进刀拖板的结合面看成是弹簧,把砂轮架看成是集中的质量,则砂轮架系统又近似地可以看成是支承在进刀拖板上的另一个弹簧——质量系统。
这样,磨头系统就可以近似地简化为图示的支承在进刀拖板上的两自由度系统。
在这一系统的动力学模型中,m1是砂轮架的质量,k1是砂轮架支承在进刀拖板上的静刚度,m2是砂轮及其主轴系统的质量,k2是砂轮主轴支承在砂轮架轴承上的静刚度。
取每个质量的静平衡位置作为坐标原点,取其铅垂位移x1及x2分别作为各质量的独立坐标。
这样x1和x2就是用以确定磨头系统运动的广义坐标。
(工程实际中两自由度振动系统) [工程实例演示]§3-2 两自由度系统的自由振动一、系统的运动微分方程(①汽车动力学模型)②以图3.2的双弹簧质量系统为例。
利用Adams 和Matlab 对二自由度系统振动进行仿真与分析一、实验思想Adams 是一种可以对一些典型运动进行高效仿真的软件,本实验是利用Adams 对二自由度系统振动进行仿真及分析,再和理论公式对比,并用另外一种常见的仿真软件Matlab 的仿真结果进行对比,观察两者的差异,分析软件仿真产生差异的原因,加深对二自由度系统振动的理解。
二、二自由度系统振动分析固有频率取决于系统本身物理性质,而与初始条件无关。
对于二自由度的振动系统是有两种频率的简谐波组成的复合运动,这两个频率都是系统的固有频率。
主振型是当系统按固有频率作自由振动时,称为主振动。
系统作主振动时,任何瞬时各个运动坐标之间具有一定的相对比值,即整个系统具有确定的振动形态,称为主振型。
强迫振动是振动系统在周期性的外力作用下,其所发生的振动称为强迫振动,这个周期性的外力称为驱动力。
三、二自由度系统自由振动1.建立二自由度系统振动模型1)创建底座:先生成一个尺寸合适的长方体基体,再使用add to part 指令创建底座的侧壁。
2)使用new part 指令分别创建两个滑块,创建滑块时应注意滑块与滑块、滑块与侧壁之间的尺寸适当。
3)弹簧连接:分别用弹簧链接滑块、侧壁的中心点。
弹簧生成后,依次选中弹簧,在modify 选项中的stiffness and damping 下拉菜单中将damping coefficient 设置成no damping,即弹簧无阻尼。
添加约束:底座和地面固定,滑块和底座用滑动副连接。
弹簧刚度分别改为1、1、2(newton/mm)滑块质量分别为1.0 2.0滑块与机体滑动副的阻尼改为1.0E-0072.模型展示3.运动仿真结果设置x10=12经过Adams 运算后,滑块1、2 运动状态如图所示:4.matlab验证程序:k1=1000;k2=1000;k3=2000;m1=1;m2=2;a=(k1+k2)/m1;b=k2/m1;c=k2/m2;d=(k2+k3)/m2;[x1x2]=dsolve('D2x1+2000*x1-1000*x2=0','2*D2x2-1000*x1+3000*x2=0','x 1(0)=0.012','x2(0)=0','Dx1(0)=0','Dx2(0)=0','t')t1=0:0.01:2;;x1=subs(x1,'t',t1);x2=subs(x2,'t',t1);figureplot(t1,x1,'-');title('系统响应x(1)曲线');xlabel('时间/s');ylabel('位移/m');figureplot(t1,x2,'-');title('系统响应x(2)曲线');xlabel('时间/s');ylabel('位移/m');计算结果:5.结果分析存在差异的原因是Adams 仿真中并没有完全忽略摩擦力,而Matlab 计算时没有考虑摩擦,故存在差异,但是在允许范围内。
第2次作业1.如图2-1所示,一小车(重P )自高h 处沿斜面滑下,与缓冲器相撞后,随同缓冲器一起作自由振动。
弹簧常数k ,斜面倾角为α,小车与斜面之间摩擦力忽略不计。
试求小车的振动周期和振幅。
hkαP答案:gkP T π2=,⎪⎭⎫ ⎝⎛+=α2sin 2k P h k P A图2-12.确定图2-2所示系统的固有频率。
圆盘质量为m 。
k kar Ox()2234mr a r k n +=ω图2-23.确定图2-3系统的固有频率。
()r R g n -=32ω图2-3第三章 两自由度系统振动§3-1 概述单自由度系统的振动理论是振动理论的基础。
在实际工程问题中,还经常会遇到一些不能简化为单自由度系统的振动问题,因此有必要进一步研究多自由度系统的振动理论。
两自由度系统是最简单的多自由度系统。
从单自由度系统到两自由度系统,振动的性质和研究的方法有质的不同。
研究两自由度系统是分析和掌握多自由度系统振动特性的基础。
所谓两自由度系统是指要用两个独立坐标才能确定系统在振动过程中任何瞬时的几何位置的振动系统。
很多生产实际中的问题都可以简化为两自由度的振动系统。
例如,车床刀架系统(a )、车床两顶尖间的工件系统(b )、磨床主轴及砂轮架系统(c )。
只要将这些系统中的主要结合面(或芯轴)视为弹簧(即只计弹性,忽略质量),将系统中的小刀架、工件、砂轮及砂轮架等视为集中质量,再忽略存在于系统中的阻尼,就可以把这些系统近似简化成图(d)所示的两自由度振动系统的动力学模型。
以图3.1(c)所示的磨床磨头系统为例分析,因为砂轮主轴安装在砂轮架内轴承上,可以近似地认为是刚性很好的,具有集中质量的砂轮主轴系统支承在弹性很好的轴承上,因此可以把它看成是支承在砂轮架内的一个弹簧——质量系统。
此外,砂轮架安装在砂轮进刀拖板上,如果把进刀拖板看成是静止不动的,而把砂轮架与进刀拖板的结合面看成是弹簧,把砂轮架看成是集中的质量,则砂轮架系统又近似地可以看成是支承在进刀拖板上的另一个弹簧——质量系统。
利用Adams 和Matlab 对二自由度系统振动进行仿真与分析一、实验思想Adams 是一种可以对一些典型运动进行高效仿真的软件,本实验是利用Adams 对二自由度系统振动进行仿真及分析,再和理论公式对比,并用另外一种常见的仿真软件Matlab 的仿真结果进行对比,观察两者的差异,分析软件仿真产生差异的原因,加深对二自由度系统振动的理解。
二、二自由度系统振动分析固有频率取决于系统本身物理性质,而与初始条件无关。
对于二自由度的振动系统是有两种频率的简谐波组成的复合运动,这两个频率都是系统的固有频率。
主振型是当系统按固有频率作自由振动时,称为主振动。
系统作主振动时,任何瞬时各个运动坐标之间具有一定的相对比值,即整个系统具有确定的振动形态,称为主振型。
强迫振动是振动系统在周期性的外力作用下,其所发生的振动称为强迫振动,这个周期性的外力称为驱动力。
三、二自由度系统自由振动1.建立二自由度系统振动模型1)创建底座:先生成一个尺寸合适的长方体基体,再使用add to part 指令创建底座的侧壁。
2)使用new part 指令分别创建两个滑块,创建滑块时应注意滑块与滑块、滑块与侧壁之间的尺寸适当。
3)弹簧连接:分别用弹簧链接滑块、侧壁的中心点。
弹簧生成后,依次选中弹簧,在modify 选项中的stiffness and damping 下拉菜单中将damping coefficient 设置成no damping,即弹簧无阻尼。
添加约束:底座和地面固定,滑块和底座用滑动副连接。
弹簧刚度分别改为1、1、2(newton/mm)滑块质量分别为1.0 2.0滑块与机体滑动副的阻尼改为1.0E-0072.模型展示3.运动仿真结果设置x10=12经过Adams 运算后,滑块1、2 运动状态如图所示:4.matlab验证程序:k1=1000;k2=1000;k3=2000;m1=1;m2=2;a=(k1+k2)/m1;b=k2/m1;c=k2/m2;d=(k2+k3)/m2;[x1x2]=dsolve('D2x1+2000*x1-1000*x2=0','2*D2x2-1000*x1+3000*x2=0','x 1(0)=0.012','x2(0)=0','Dx1(0)=0','Dx2(0)=0','t')t1=0:0.01:2;;x1=subs(x1,'t',t1);x2=subs(x2,'t',t1);figureplot(t1,x1,'-');title('系统响应x(1)曲线');xlabel('时间/s');ylabel('位移/m');figureplot(t1,x2,'-');title('系统响应x(2)曲线');xlabel('时间/s');ylabel('位移/m');计算结果:5.结果分析存在差异的原因是Adams 仿真中并没有完全忽略摩擦力,而Matlab 计算时没有考虑摩擦,故存在差异,但是在允许范围内。
5-1 如图所示的系统,若疏通的初初条件:,0,m m 5,0201010====x xx t 试供系统对于初初条件的赞同.之阳早格格创做解:ω有二个值5-2图示为一戴有附于品量m 1战m 2上的拘束弹簧的单晃,采与品量的微弱火仄仄移x 1战x 2为坐标,设m m m ==21,l l l ==21,021==k k ,试供系统的固有频次战主振型.解:设1m 沿1x 目标移动1个单位,脆持2m 没有动,对于2m ,1m 举止受力分解,可得:共理使2m 沿2x 目标移动一个单位,脆持1m 没有变,对于2m 受力分解可得:22222()()*0m C kk l m g =--=∑,22222m g k k l =+;刚刚度矩阵为11211222,,k k k k ⎡⎤=⎢⎥⎣⎦k ,品量距阵12,00,m m ⎡⎤=⎢⎥⎣⎦m , 戴进可得疏通的微分圆程为:mx kx F +=12,00,m m ⎡⎤⎢⎥⎣⎦12x x ⎡⎤⎢⎥⎣⎦+11211222,,k k k k ⎡⎤⎢⎥⎣⎦12x x ⎡⎤⎢⎥⎣⎦=F ;综上解得:⎪⎪⎪⎩⎪⎪⎪⎨⎧=⎪⎪⎭⎫⎝⎛++-=-⎪⎪⎭⎫ ⎝⎛++++)()(2222212222122212212111t F x l g m k x l g m x m t F x l gm x g l m g l m m k x m利用刚刚度效率系数法供刚刚度矩阵k .设0,121==x x ,分别绘出1m 与2m 的受力图,并施加二物块力2111,k k ,列仄稳圆程,对于1m :∑=0X ,0sin sin 1221111=---k T T kθθ∑=0Y ,0cos cos 12211=--g m T T θθ对于2m :∑=0X ,0sin 2221=+θT k∑=0Y ,0cos 222=-g m T θ设1,021==x x ,分别绘出1m 与2m 的受力图,并施加二物块力2212,k k ,列 仄稳圆程,对于1m :∑=0X ,0sin 212=+θT k∑=0Y ,0cos 121=--g m T T θ对于2m :∑=0X ,0sin 2222=--θT k k∑=0Y ,0cos 22=-g m Tθ由,1111tan sin l =≈θθ,2221tan sin l =≈θθ,1cos cos 21≈≈θθ,1cos ≈θ,21tan sin l =≈θθ,解得,22121111)(l g m l g m m k k +++=,2221l g m k -=,2212l gm k -=,22222l g m k k +=得效率力圆程为由圆程得到系统的刚刚度矩阵为K =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--l mg lmg l mg l mg 3系统的品量矩阵为M =⎥⎦⎤⎢⎣⎡m m 00由频次圆程02=-M K p ,得展启为0242222224=+-g m g m lp l m p ,解出频次为由特性矩阵M K B 2p -=的伴伴矩阵的第一列,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=l mg m p lmg adj 2)1(B并分别代进二频次值,得到二阶振型为1213mgl V mgp m l==-,2213mglV mgp ml==-⎪⎪⎪⎭⎫ ⎝⎛+=1211)1(A,⎪⎪⎪⎭⎫ ⎝⎛-=1211)1(A系统的主振型矩阵为5-3 图示的扭振系统由无品量的轴战二个圆盘组成,已知轴段的扭转刚刚度为k q 1及k q 2,圆盘的转化惯量为I 1、I 2,并受到扭矩M 1、M 2的效率,试写出系统疏通的微分圆程,并供系统的固有频次战主振型.题5-3图解:与12,θθ为广义坐标,它们分别为M 1、M 2的转角. 当1θ=1,2θ=0时,1121,k k 分别表示脆持系统该位子仄稳,应加正在M 1、M 2的力奇矩,由刚刚体的仄稳条件得当1θ=0,2θ=1时,1121,k k 分别表示脆持系统该位子仄稳,应加正在M 1、M 2的力奇矩,由刚刚体的仄稳条件得对于12,θθ与任性值时,根据达朗贝我本理,可得系统的微分圆程为即5-4图示悬臂梁的品量没有计,梁的抗直刚刚度为EI ,设m m m ==21,试写出系统疏通的微分圆程,并供系统的固有频次战主振型.题5-4图解:与为12,x x 广义坐标,根据柔度效率系数的定义,11δ表示正在1m 处施加单位力(沿1x 目标)正在1m 处爆收的位移.按资料力教的挠度公式,则有22δ表示正在2m 处施加单位力(沿2x 目标)正在2m 处爆收的位移.有1221δδ=表示正在2m 处施加单位力正在1m 处爆收的位移等于正在1m 处施加单位力正在2m 处爆收的位移.有 系统的位移圆程即有所供微分圆程为解:系统的品量矩阵M=⎥⎦⎤⎢⎣⎡m m 00.最先仅正在品量m 1处施加横曲单位力Q=1,则m 1爆收的位移是:δ11;m 2爆收的位移是:δ21.绘出m 1的受力图,如图(1).0x =时,'v =0,所以1c =0;v ,所以1d =0.2l x =时,31124l EIδ=;以为θ非常小,所以有sin 'v θθ≈=,再正在2m 上施加单位力,则1m 处爆收的位移为12δ,2m 处爆收的位移为22δ.绘出2m 的受力图如图(2).0x =时,'0v =,所以20c =;0v =,所以20d =.2l x =时,312545l EI δ=x l =时,3221648l EI δ=于是不妨写出柔度矩阵 系统的特性矩阵令348ml EI α=,21p λ=,则有25516L αλαααλ-⎡⎤=⎢⎥-⎣⎦频次圆程,0L =得供出各根117.6λα=20.4λα= 于是得到固有频次131.65EI p ml =2310.95EIp ml =为供系统的主振型,先供adjL 16552adjL αλαααλ--⎡⎤=⎢⎥--⎣⎦ 将1λ,2λ分别代进第一列,则各阶主振型为5-5如图所示,推紧的无品量弦上附着二个品量m 1与m 2,假定品量做横背微振荡时弦中推力F T 没有变,设m m m ==21,试写出系统疏通的微分圆程,并供系统的固有频次战主振型.5-5图解:正在横曲目标以m 1为坐标本面修坐y 坐标(正目标横曲背下).令m 1有单位位移1y =1,而2m 脆持没有动,1112k k 分别表示脆持系统正在该位子仄稳,应正在12m m 施加的力,由刚刚体12m m 的仄稳条件得11212/,/t t k F l k F l ==-. 再令2m 有单位们移2y =1,共理可得1222/,2/t t k F l k F l =-=.果此,可得到刚刚度矩阵111221222///2/t t t t F l F l k k K F l F l k k -⎛⎫⎛⎫==⎪ ⎪-⎝⎭⎝⎭ 可写出系统疏通的微分圆程为..0M x Kx +=,整治后得解:令1x =1,2x =011k =2T F sin θ=2T F tan θ=2T F 1l =2TF l (θ→0) 21TF k l =-令211,0x x ==共理得222T F k l =12T F k l =-图5——5所以系统疏通的微分圆程为:解:系统的品量矩阵M=⎥⎦⎤⎢⎣⎡m m 00.最先仅正在品量m 1处施加横曲单位力Q=1,则m 1爆收的位移是:δ11;m 2爆收的位移是:δ21.绘出m 1的受力图,如图(1).11212222(2)1232222111TTTF F lll F L p adjL L M I pA δδδαλαααλαλαααλ+==-⎡⎤=⎢⎥-⎣⎦=--⎡⎤=⎢⎥--⎣⎦=∆-=-⎡⎤=⎢⎥⎣⎦由受力仄稳得:共理,2m 受单位力时,得 于是不妨写出柔度矩阵 系统的特性矩阵 令3Tml F α=,21p λ=则有:频次圆程,0L =得 供出各根于是得到固有频次为供系统的主振型,先供adjL将1λ,2λ分别代进第一列,则各阶主振型为5-6 图中刚刚性杆的品量没有计,按图示坐标修坐微分圆程,试供出系统固有频次战主振型.解: 当m 下落单位少度时,根据系统受力仄稳战m 所受力矩为整得:11212120220k k k k kl k l k l -+++=⎧⎨++=⎩解的112154k k k k =⎧⎨=-⎩共理得221254k kk k =⎧⎨=-⎩系统的品量矩阵战刚刚度矩阵分别为由..0M x Kx +=得微分圆程..11..2205400450x x m k k m k k x x ⎡⎤-⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦系统的特性矩阵为2254452k p m k B k k p m ⎡⎤--=⎢⎥--⎣⎦ 由频次圆程22540452k p mkk k p m --=--得24221590k k p p m m ⎛⎫⎛⎫-+= ⎪ ⎪⎝⎭⎝⎭解得21 6.85k p m =220.65kp m = 固有频次为1 2.617k p m =20.806kp m =题5-6图特性矩阵的伴伴矩阵2252445k p m k adjB k k p m ⎡⎤--=⎢⎥--⎣⎦ 将固有频次值代进,得主振型()110.4625A ⎡⎤=⎢⎥⎣⎦,()211.0875A ⎡⎤=⎢⎥-⎣⎦或者由公式供固有频次战主振型令11115k k a m m==,12114k k b m m=-=,21222k kc m m=-=,222252k kd m m ==则把数据代进以来的截止是:5-7试供图示系统的固有频次战主振型.已知m m m 2221==.5-8刚刚杆AB 少l ,品量没有计.其一端B 铰连交,另一端刚刚连一品量为m 的物体A ;其下连交弹簧常量为k 的弹簧,并挂有品量为m 的物体D ,杆AB 中面用弹簧常量为k 的弹簧推住,使杆正在火仄位子仄稳,试供系统的固有频次.5-8图 解:x 1,0==D A x :题5-7图k k k k -==2111,; x 0,1==D A x : k 012=+k 2211222l kl k l k =+解得kk k k 45,2212=-=由MP K 2-=0知221245m p k kk m p k ----=0Pm kp m k 342.0,46.121==解:给杆AB 一单位转角,则有Bm=∑,则11022l lk k l l k ⋅⋅+⋅⋅-=,所以对于物体D 有210k kl +=,所以21k kl =- 给物体D 一单位位移,则对于物体D 有220k k -=,得22k k = 又1221k k kl ==-所以刚刚度矩阵为254klkl K klk ⎡⎤-⎢⎥=⎢⎥-⎣⎦所以2112250040x m x kl kl x m x kl k ⎡⎤-⎡⎤⎡⎤⎡⎤⎢⎥+=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦-⎣⎦由20K p M -=即222504kl p m klkl k p m --=--∴系统的固有频次为12p p ==5-9二根相共的沉为W 的杆,正在中简铰收,杆少为2a .二杆的端面以弹簧k 战k 1联交如图.试供那一系统的固有频次及主振型.5-9图5-10一刚刚性圆盘品量为M ,半径为R .圆盘轴心上铰联一根少为l 的臂,臂端戴有一个品量为m 的晃锤,如题5-10图所示.供晃锤自由振荡时的固有频次.广义坐标为x 1战x 2,它们完备天决定了系统的位子,而且对于任性拘束皆是独力的.果θR x =令1x q i =,用推格朗日圆程于是可得到疏通圆程:令2x q i =,用推格朗日圆程可得疏通圆程为假定t X x t X x ωωsin ,sin 2211==,便可供解那个疏通圆程组. 果此,可得频次圆程 不妨得到w = 0或者l gM m )3/21(+=ω且M mX X 3221-=.5-11题5-11 (a) 图所示二层刚刚架式框架.各层楼里品量分别为m 1=m ,m 2=2m ;各层的侧移刚刚度kh EIk i ==324(该层柱子上,下二端爆收单位相对于位移时,该层各柱剪力之战),试分解其自由振荡.设横梁变形略来没有计.解:(1)供刚刚度矩阵[K ]战品量矩阵[M ]正在各楼层处附加火仄链杆,并分别使各层爆收一单题5-10图位位移.由各层的剪力仄稳条件,可供得各刚刚度效率系数,其数值分别如图5-11(b)、(c)所示.得刚刚度矩阵为⎥⎥⎦⎤⎢⎢⎣⎡--=2111][k K(a)品量矩阵为⎥⎥⎦⎤⎢⎢⎣⎡=⎥⎥⎦⎤⎢⎢⎣⎡=21][21m m m M(b)(2)频次分解引进标记2ωηk m =(c)则由式(3-12)知22111|][][|2=----=-ηηωM K (d)展启上述频次圆程,得01422=+-ηη(e)解得式(e)的二个根为⎪⎪⎭⎪⎪⎬⎫=+==-=707.1221293.022121ηη(f)将式(f)代进式(c),可得二个自振频次⎪⎪⎭⎪⎪⎬⎫====m k m k m k m k 401.6650.22211ηωηω(g)(3)振型分解由振幅圆程(3-11)得题5-11图)2,1()1(21)1()2(=-==j j j j j ηχχρ二个振型的大概形状如图5-11(a)、(b)所示.。
5-1 如图所示的系统.若运动的初始条件:,0,mm 5,0201010====x x x t 试求系统对初始条件的响应。
解:112211222112102,,22,0,202020cos(),cos()cos()005,k k k k k x x k k x k k x mx kx kx mx kx kx x x A t t kA t t x mm ωϕωωϕωϕω-⎡⎤=⎢⎥-⎣⎦-⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦+-=+-===++++====2带入可得运动微分方程:m,00,m 令代入原方程可得-mA 有时,1020120,cos 5,sin 0,5,0().x x A A A mm x x mm ϕωϕϕ===-=====有可得ω有两个值12p p ==15522x =+25522x =-5-2 图示为一带有附于质量m 1和m 2上的约束弹簧的双摆.采用质量的微小水平平移 x 1和x 2为坐标.设m m m ==21.l l l ==21.021==k k .试求系统的固有频率和主振型。
解:设1m沿1x 方向移动1个单位.保持2m 不动.对2m .1m 进行受力分析.可得:2122()0,m A k l m g =--=∑2212m g k l =-1112111212122111211112()()()0m B kk k l m m g m m m m m gk g k k g k l l l =-+-+=++=+-=++∑同理使2m 沿2x 方向移动一个单位.保持1m 不变.对2m 受力分析可得:22222()()*0m C k k l m g =--=∑.22222m gk k l =+; 刚度矩阵为11211222,,k k k k ⎡⎤=⎢⎥⎣⎦k .质量距阵12,00,m m ⎡⎤=⎢⎥⎣⎦m .带入可得运动的微分方程为:mx kx F +=12,00,m m ⎡⎤⎢⎥⎣⎦12x x ⎡⎤⎢⎥⎣⎦+11211222,,k k k k ⎡⎤⎢⎥⎣⎦12x x ⎡⎤⎢⎥⎣⎦=F ;综上解得:⎪⎪⎪⎩⎪⎪⎪⎨⎧=⎪⎪⎭⎫⎝⎛++-=-⎪⎪⎭⎫ ⎝⎛++++)()(2222212222122212212111t F x l g m k x l g m x m t F x l gm x g l m g l m m k x m利用刚度影响系数法求刚度矩阵k 。
利用Adams 和Matlab 对二自由度系统振动进行仿真与分析
一、实验思想
Adams 是一种可以对一些典型运动进行高效仿真的软件,本实验是利用Adams 对二自由度系统振动进行仿真及分析,再和理论公式对比,并用另外一种常见的仿真软件Matlab 的仿真结果进行对比,观察两者的差异,分析软件仿真产生差异的原因,加深对二自由度系统振动的理解。
二、二自由度系统振动分析
固有频率取决于系统本身物理性质,而与初始条件无关。
对于二
自由度的振动系统是有两种频率的简谐波组成的复合运动,这两个频率都是系统的固有频率。
主振型是当系统按固有频率作自由振动时,称为主振动。
系统作
主振动时,任何瞬时各个运动坐标之间具有一定的相对比值,即整个系统具有确定的振动形态,称为主振型。
强迫振动是振动系统在周期性的外力作用下,其所发生的振动称
为强迫振动,这个周期性的外力称为驱动力。
三、二自由度系统自由振动
1.建立二自由度系统振动模型
1)创建底座:先生成一个尺寸合适的长方体基体,再使用add to part 指令创建底座的侧壁。
2)使用new part 指令分别创建两个滑块,创建滑块时应注意滑
块与滑块、滑块与侧壁之间的尺寸适当。
3)弹簧连接:分别用弹簧链接滑块、侧壁的中心点。
弹簧生成后,依次选中弹簧,在modify 选项中的stiffness and damping 下拉菜单中将damping coefficient 设置成no damping,即弹簧无阻尼。
添加约束:底座和地面固定,滑块和底座用滑动副连接。
弹簧刚度分别改为1、1、2(newton/mm)
滑块质量分别为1.0 2.0
滑块与机体滑动副的阻尼改为1.0E-007
2.模型展示
3.运动仿真结果
设置x10=12
经过Adams 运算后,滑块1、2 运动状态如图所示:
4.matlab验证
程序:k1=1000;k2=1000;k3=2000;
m1=1;m2=2;
a=(k1+k2)/m1;b=k2/m1;c=k2/m2;d=(k2+k3)/m2;
[x1
x2]=dsolve('D2x1+2000*x1-1000*x2=0','2*D2x2-1000*x1+3000*x2=0','x 1(0)=0.012','x2(0)=0','Dx1(0)=0','Dx2(0)=0','t')
t1=0:0.01:2;;
x1=subs(x1,'t',t1);
x2=subs(x2,'t',t1);
figure
plot(t1,x1,'-');
title('系统响应x(1)曲线');
xlabel('时间/s');
ylabel('位移/m');
figure
plot(t1,x2,'-');
title('系统响应x(2)曲线');
xlabel('时间/s');
ylabel('位移/m');
计算结果:
5.结果分析
存在差异的原因是Adams 仿真中并没有完全忽略摩擦力,而
Matlab 计算时没有考虑摩擦,故存在差异,但是在允许范围内。
综上所述,利用两种软件得出的结果输出比较接近,可认为仿真结果正确。
四、二自由度系统受迫振动
将机体与地面的锁改为滑动副,同时将滑块移动副初始状态设为0,即可
2.运动结果仿真
将底座和地面的滑动副上输入不同运动方程x=sin(w*t)。
当w=10 时,得到滑块1 的一运动曲线;当w 为其固有频率时,得到另一曲线。
曲线如图所示:
参数设置
仿真结果
将w改为固有频率31.6
仿真结果
3.实验结果检验
和单自由度系统一样,二自由度系统在受到持续的激振力作用下就会产生强迫振动,而且在一定条件下也会产生共振。
共振是指一物理系统在必须特定频率下,相比其他频率以更大的振幅做振动的情形;这些特定频率称之为共振频率。
利用Matlab 仿真得幅频特性曲线,它表明系统位移对频率的响应特性。
程序如下
k1=1000;k2=1000;k3=2000;
m1=1;m2=2;
w=0:1:100;
a=(k1+k2)/m1;b=k2/m1;c=k2/m2;d=(k2+k3)/m2;q1=1/m1;q2=1/m2;
dw=w.^4-(a+d)*(w.^2)+a*d-b*c;
B1=abs(((d-w.^2)*q1+b*q2)./dw);
B2=abs((c*q1+(a-w.^2)*q2)./dw);
figure
hold on
plot(w,B1,'g-');
title('幅频特性曲线');
xlabel('¦./ /s');
ylabel('B1、B2/ m');
plot(w,B2,'r-');
legend('B1','B2',1);
图像
4.实验结果分析
当w=10时,相应的质量块1幅值较小,仅有略微的振动,但是当
w=31.6时,即共振时,其最终的幅值很大。
由于在运用Adams进行验证时,并非直接在质量块1、质量块2上施加力-时间方程,而是通过
对底座加设一滑动副,在滑动副上施加一位移-时间变化方程,所以
当w=31.62时,相应的质量块1幅值随着时间是逐渐增大,有一个滞后的过程。