第7章 角动量
- 格式:ppt
- 大小:543.50 KB
- 文档页数:5
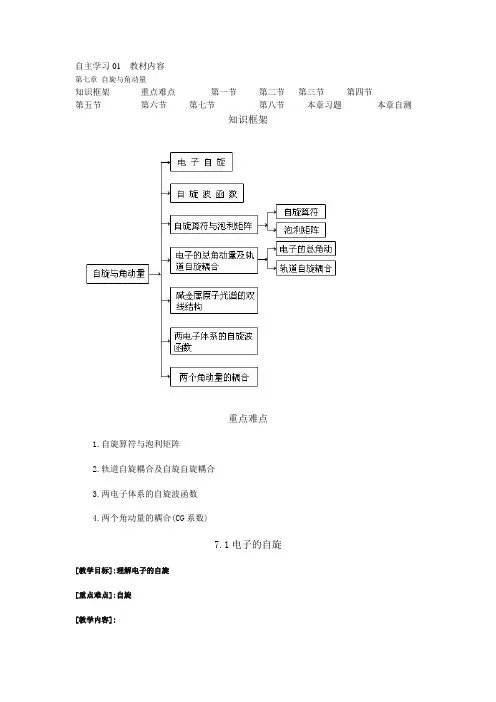
自主学习01 教材内容第七章自旋与角动量知识框架重点难点第一节第二节第三节第四节第五节第六节第七节第八节本章习题本章自测知识框架重点难点1.自旋算符与泡利矩阵2.轨道自旋耦合及自旋自旋耦合3.两电子体系的自旋波函数4.两个角动量的耦合(CG系数)7.1电子的自旋[教学目标]:理解电子的自旋[重点难点]:自旋[教学内容]:在较强的磁场下(∽T 10),我们发现一些类氢离子或碱金属原子有正常塞曼效应的现象,而轨道磁矩的存在,能很好的解释它但是,当这些原子或离子置入弱磁场(∽T 110-)的环境中,或光谱分辨率提高后,发现问题并不是那么简单,这就要求人们进一步探索。
大量实验事实证明,认为电子仅用三个自由度z ,y ,x 来描述并不是完全的。
我们将引入一个新的自由度—自旋,它是粒子固有的。
当然,自旋是Dirac 电子的相对论性理论的自然结果。
现在我们从实验事实来引入。
(1)电子自旋存在的实验事实(1)Stern-Gerlach 实验(1922年)当一狭窄的原子束通过非均匀磁场时,如果原子无磁矩,它将不偏转;而当原子具有磁矩μ,那在磁场中的附加能量为αμμcos B B U -=⋅-=如果经过的路径上,磁场在z 方向上有梯度,即不均匀,则受力dz dB U F αμcos =-∇=从经典观点看αcos 取值(从11--),因此,不同原子(磁矩取向不同)受力不同,而取值dz dB μ-—dz dB μ所以原子分裂成一个带。
但Stern-Gerlach 发现,当一束处于基态的银原子通 过这样的场时,仅发现分裂成二束,即仅二条轨道(两个态)。
而人们知道,银原子(47z =)基 态0l =,所以没有轨道磁矩,而分成二个状态(二 个轨道),表明存在磁矩,而这磁矩在任何方向上的 投影仅取二个值。
这磁矩既然不是由于轨道运动产生的,因此,只能是电子本身的(核磁矩可忽),这磁矩称为内禀磁矩sμ,与之相联系的角动量称为电子自旋,它是电子的一个新物理量,也是一个新的动力学变量。


第 7 章动量定理和动量守恒定律§7-1 动量定理和动量守恒定律物体之间或物体内部各部分之间因运动发生相对地点变化的过程称为机械运动。
它是物质的各种各种运动形式中最简单、也是最广泛的一种,比如:行星绕太阳的转动、宇宙飞船的航行、机器的运行、弹簧的伸长或压缩、水和空气等流体的流动等等,都是机械运动。
而各种复杂的运动形式如生命现象、化学反响等,固然也有地点的变化,但其实不归纳为机械运动。
机械运动有两种量度:假如存在的机械运动仍以保持机械运动的形式进行传达,那么应以动量 mv 来量度;假如机械运动转变成其余形式的运动,应以动能12mv2来量度。
即动量是以机械运动来量度机械运动,动能是以机械运动转变成必定量的其余形式的运动的能力来量度机械运动的,动量和动能是研究机械运动不行缺乏的物理量。
动量、动量定理1、动量p物体的质量 m 与其速度 v 的乘积,称为该物体的动量p ,即p mv 。
在直角坐标系中动量 p 可表示为p mv mv x i mv y j mv z k p x i p y j p z k ( 7-1-1 )由( 7-1-1 )式知,动量是一个矢量,拥有刹时性。
2、动量定理若在时辰 t ,物体的动量为 p(t ) ,经过t 时间段,其动量为p(t t ) ,在t tt 时间微元段上,其动量的增量dp 为d p p(t t ) p(t)若在该时间元段t 内,物体受力 f 作用,由牛顿第二定律知有dp fdt ( 7-1-2 )关系建立。
若在t1 t 2的时间段上,物体受力 f 作用,将每一个时间元段上动量的增量dp 加起来,即在 t1 t2 的时间段上对其乞降,则该时间段上的动量增量p 为p p 2 p1 t 2 f dt ( 7-1-3 )t 1t 2f dt 称为力( 7-1-2 )式与( 7-1-3 )式就是动量定理的表述。
人们又常把(7-1-3 )式的右项t 1f的冲量。
关于由多个物体所构成的系统,其总动量等于各物体动量p i的矢量和,即系统总动量p为np p ii 1系统所受的力可分为:外力、内力,外力即来自系统外的作用,内力即指系统内各物体间的互相作使劲。
第七章 刚体力学7.1.1 设地球绕日作圆周运动.求地球自转和公转的角速度为多少rad/s 估算地球赤道上一点因地球自转具有的线速度和向心加速度.估算地心因公转而具有的线速度和向心加速度(自己搜集所需数据).[解 答]7.1.2 汽车发动机的转速在12s 内由1200rev/min 增加到3000rev/min.(1)假设转动是匀加速转动,求角加速度.(2)在此时间内,发动机转了多少转[解 答](1)22(30001200)1/601.57(rad /s )t 12ωπβ⨯-⨯===V V(2)222220()(30001200)302639(rad)2215.7πωωθβ--===⨯所以 转数=2639420()2π=转7.1.3 某发动机飞轮在时间间隔t 内的角位移为球t 时刻的角速度和角加速度.[解 答]7.1.4 半径为0.1m 的圆盘在铅直平面内转动,在圆盘平面内建立O-xy 坐标系,原点在轴上.x 和y 轴沿水平和铅直向上的方向.边缘上一点A 当t=0时恰好在x 轴上,该点的角坐标满足21.2t t (:rad,t :s).θθ=+求(1)t=0时,(2)自t=0开始转45o 时,(3)转过90o时,A 点的速度和加速度在x 和y 轴上的投影.[解 答](1) A ˆˆt 0,1.2,R j 0.12j(m/s).0,0.12(m/s)x y ωνωνν====∴==v(2)45θ=o时,由2A 1.2t t ,t 0.47(s)42.14(rad /s)v R πθωω=+==∴==⨯v v v得(3)当90θ=o时,由7.1.5 钢制炉门由两个各长1.5m 的平行臂AB 和CD 支承,以角速度10rad/s ω=逆时针转动,求臂与铅直45o 时门中心G 的速度和加速度.[解 答]因炉门在铅直面内作平动,门中心G 的速度、加速度与B 或D点相同。
所以:7.1.6 收割机拔禾轮上面通常装4到6个压板.拔禾轮一边旋转,一边随收割机前进.压板转到下方才发挥作用,一方面把农作物压向切割器,另一方面把切割下来的作物铺放在收割台上,因此要求压板运动到下方时相对于作物的速度与收割机前进方向相反. 已知收割机前进速率为1.2m/s ,拔禾轮直径1.5m ,转速22rev/min,求压板运动到最低点挤压作物的速度.[解 答]取地面为基本参考系,收割机为运动参考系。