行驶动力学模型资料
- 格式:ppt
- 大小:1.44 MB
- 文档页数:79
汽车动力学模型基础方程在汽车工程中,动力学模型是一个重要的概念,它描述了汽车在运动过程中的力学特性和行为。
其中,汽车动力学模型的基础方程起着至关重要的作用,它们是描述汽车动力学特性的数学表达式,是汽车工程中的核心理论基础。
一、运动方程汽车在运动中受到多种力的作用,这些力包括牵引力、阻力、重力等。
通过牛顿第二定律,可以得到描述汽车运动的基本方程:F = ma其中,F是受到的合外力,m是汽车的质量,a是汽车的加速度。
根据牵引力、阻力和重力的关系,可以得到更加细致的运动方程:F_traction - F_drag - F_roll - F_grade = ma其中,F_traction是牵引力,F_drag是阻力,F_roll是滚动阻力,F_grade是上坡或下坡时产生的力。
这些力可以通过具体的公式计算得到,从而得到汽车的加速度。
二、转向方程在汽车运动中,转向是一个重要的问题。
汽车的转向能力与转向系的设计和轮胎的特性有关。
描述汽车转向行为的基础方程可以通过转向角速度、侧向力和横摆刚度等参数建立,具体方程如下:Mz = Iz * ωz + Fy * a其中,Mz是横摆力矩,Iz是车辆绕垂直轴的惯性矩,ωz是车辆的横摆角速度,Fy是轮胎的侧向力,a是车辆的横向加速度。
这个方程描述了汽车在转向过程中受到的各种力的平衡关系。
三、刹车方程刹车是汽车行驶中不可或缺的部分,汽车刹车性能与刹车系统、轮胎和路面特性等有关。
汽车刹车性能的基础方程可以描述如下:Fbrake = μ * Fz其中,Fbrake是刹车力,μ是刹车系数,Fz是轮胎受力。
刹车系数与刹车系统和轮胎的摩擦特性有关,它是刹车性能的一个重要参数。
总结通过以上的分析可以看出,汽车动力学模型的基础方程是汽车工程中的核心内容,它涉及到多个力学和运动学的概念,并且需要深入的数学和物理知识。
汽车动力学模型的基础方程不仅对汽车设计和优化具有重要意义,对于理解汽车行驶过程中的各种力学特性也有着重要意义。
商用车车辆开发动力学模型1. 引言随着科技的进步和交通运输行业的发展,商用车车辆的开发与设计面临着越来越高的要求。
为了满足这些要求,开发出更加高效、安全和环保的商用车,动力学模型在车辆设计中的作用越来越重要。
本文将深入探讨商用车车辆开发动力学模型的基本原理、特性、开发流程、验证与评估以及应用场景与优势。
2. 动力学模型的基本原理动力学模型是一种数学模型,用于描述物体运动的状态和行为。
在车辆动力学中,这种模型被用来模拟和分析车辆在不同工况下的运动特性,包括纵向、横向和横摆运动等。
基于牛顿第二定律和相关运动学关系,动力学模型能够预测车辆在不同路面条件、行驶状态和外部干扰下的响应。
3. 商用车车辆动力学特性商用车,如重型卡车和大型客车,具有独特的动力学特性。
这些特性包括较大的质量、较高的重心位置、复杂的悬挂系统和特定的驾驶室布局等。
这些因素都显著影响着商用车在行驶过程中的稳定性、操纵性和乘坐舒适性。
因此,在建立商用车动力学模型时,必须充分考虑这些特性。
4. 模型的开发流程开发商用车车辆动力学模型通常遵循以下步骤:首先,通过实验和测量获取车辆的详细参数,包括质量、质心位置、转动惯量等;其次,基于这些参数和车辆的运动方程建立数学模型;随后,通过编程实现模型,并进行初步验证;最后,通过实车试验对比模型预测与实际表现,进行必要的调整和优化。
5. 模型的验证与评估模型的验证与评估是确保其准确性和可靠性的关键环节。
这通常涉及到对比模型的预测结果与实际测试数据。
评估指标包括预测的准确性、稳定性以及与实际工况的符合程度等。
在评估过程中,还需要对模型在不同工况下的表现进行充分测试,以确保其在各种情况下的可靠性。
6. 模型的应用场景与优势商用车车辆开发动力学模型的应用场景广泛,主要包括新车型的开发与设计、现有车型的改进与优化以及智能化控制等。
在开发阶段,模型能够预测新车型的性能表现,为设计决策提供依据;在优化阶段,通过对模型的调整和改进,可以显著提高现有车型的性能;在智能化控制方面,动力学模型为自动驾驶、智能导航和车辆协同提供了强大的支持。
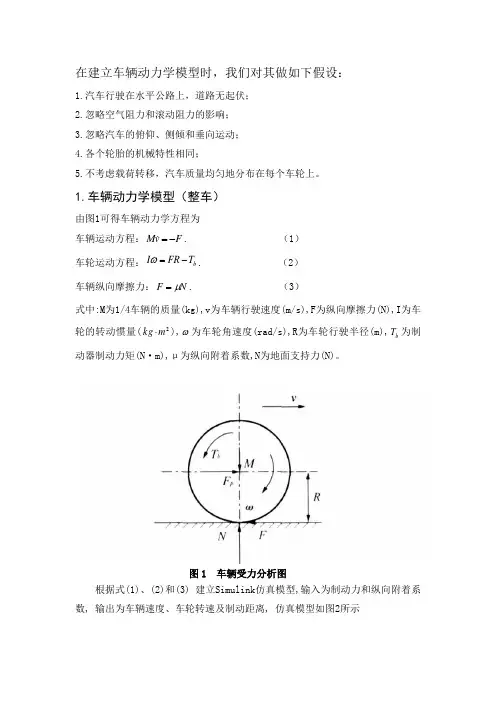
在建立车辆动力学模型时,我们对其做如下假设:1.汽车行驶在水平公路上,道路无起伏;2.忽略空气阻力和滚动阻力的影响;3.忽略汽车的俯仰、侧倾和垂向运动;4.各个轮胎的机械特性相同;5.不考虑载荷转移,汽车质量均匀地分布在每个车轮上。
1.车辆动力学模型(整车)由图1可得车辆动力学方程为车辆运动方程:F vM -= . (1) 车轮运动方程:b T FR I -=ω. (2) 车辆纵向摩擦力:N F μ=. (3)式中:M 为1/4车辆的质量(kg),v 为车辆行驶速度(m/s),F 为纵向摩擦力(N),I 为车轮的转动惯量(2m kg ⋅),ω为车轮角速度(rad/s),R 为车轮行驶半径(m),b T 为制动器制动力矩(N ·m),μ为纵向附着系数,N 为地面支持力(N)。
图1 车辆受力分析图根据式(1)、(2)和(3) 建立Simulink 仿真模型,输入为制动力和纵向附着系数, 输出为车辆速度、车轮转速及制动距离, 仿真模型如图2所示图2 车辆动力学仿真模型2.轮胎模型轮胎模型是指制动过程中轮胎附着力和其它各种参数之间的函数关系式,通常用轮胎附着系数与各种参数的函数关系式来表示。
而影响附着系数的因素很多,如前所述.除滑移率外,道路的材料、路面的状况与轮胎的结构、胎面花纹、材料以及汽车运动速度等都是影响因素。
但在实际应用中,很难得出上述多种变量对附着系数影响的关系式,而较为实际与合理的办法则是只考虑对附着系数影响较大的因素,建立附着系数的计算表达式。
经典的轮胎模型有魔术公式轮胎模型、双线性模型、Dugoff轮胎模型和Burckhardt轮胎模型等,这里采取应用比较广泛的双线性模型。
图3 纵向附着系数μ 与滑移率S 的关系曲线根据上图,推导出双线性轮胎模型的数学表达式为:................................................................................................................11h opt opt hg opt h g optopt opt S S S S S S S S S S μμμμμμμ⎧=⋅≤⎪⎪⎨-⋅-⎪=-⋅>⎪--⎩(4)基于本课题的研究目的,我们采用双线性模型分别模拟三种典型路面的 曲线,并应用于汽车防抱制动系统的控制仿真模型中。
履带车辆的动力学运动学模型在探索履带车辆的动力学运动学模型时,我们将以人类的视角来描述这一过程。
履带车辆是一种特殊的交通工具,它具有独特的设计和机械结构,使其能够在各种地形条件下行驶。
让我们一起来了解它的动力学和运动学原理。
动力学是研究物体运动和力的学科,而运动学则研究物体的运动状态和轨迹。
履带车辆的动力学运动学模型涉及到其推进力、摩擦力、速度和加速度等因素。
履带车辆的推进力是使其前进的关键。
它通常由发动机提供,通过传动系统传递到履带上。
这种推进力可以通过控制油门来调节,从而改变车辆的速度。
当油门增加时,发动机输出的功率增加,推进力也会增加,车辆加速前进。
摩擦力是履带车辆运动中一个重要的因素。
摩擦力产生于履带与地面之间的接触面,它是使车辆能够在不滑动的情况下前进的关键。
摩擦力的大小取决于地面的粗糙程度和履带的材质。
当地面较滑时,摩擦力较小,车辆容易打滑;而当地面较粗糙时,摩擦力较大,车辆能够更好地抓地。
速度和加速度是描述履带车辆运动状态的重要指标。
速度是指车辆在单位时间内前进的距离,可以用公里/小时或米/秒来表示。
加速度则是指车辆在单位时间内速度的变化量,可以用米/秒²来表示。
通过控制推进力的大小和方向,可以改变车辆的速度和加速度。
在履带车辆的动力学运动学模型中,还要考虑到其他因素的影响,如车辆质量、车辆的阻力和地形的坡度等。
车辆质量越大,需要更大的推进力才能使其前进;而阻力越大,车辆的速度和加速度就会受到更大的影响;地形的坡度也会对车辆的前进产生影响,车辆在上坡时需要更大的推进力,而在下坡时则可能需要制动力来控制速度。
履带车辆的动力学运动学模型是一个复杂而又有趣的领域。
通过对推进力、摩擦力、速度和加速度等因素的研究,我们可以更好地理解和控制履带车辆的运动行为。
这不仅有助于改进车辆的设计和性能,还为我们探索更广阔的交通工具领域提供了有益的启示。
unicycle动力学模型
单轮车(Unicycle)动力学模型是用来描述单轮车运动和稳定
性的数学模型。
在这个模型中,单轮车被简化为一个质点,考虑其
在平面上的运动。
下面我将从几个角度来解释单轮车的动力学模型。
首先,我们可以从力学角度来看单轮车的动力学模型。
单轮车
在运动过程中受到多种力的作用,包括重力、惯性力、摩擦力等。
这些力会影响单轮车的运动状态,包括速度、加速度、转向等。
通
过建立动力学方程,可以描述单轮车在外力作用下的运动规律。
其次,我们可以从控制理论的角度来看单轮车的动力学模型。
控制理论可以用来研究如何通过操纵输入来改变系统的运动状态。
在单轮车的动力学模型中,可以考虑如何通过操纵车轮的转动来控
制单轮车的运动,使其保持平衡或者实现特定的运动轨迹。
另外,我们还可以从仿生学角度来看单轮车的动力学模型。
仿
生学是研究生物系统的原理,并将其应用到工程和技术中。
通过研
究动物或昆虫的运动原理,可以启发设计单轮车的动力学模型,从
而改进其稳定性和运动性能。
总的来说,单轮车的动力学模型是一个复杂而多维的问题,涉及到力学、控制理论、仿生学等多个领域的知识。
通过综合运用这些知识,可以建立全面完整的单轮车动力学模型,为单轮车的设计和控制提供理论基础。