关于共模反馈环路稳定性的考虑
- 格式:docx
- 大小:131.60 KB
- 文档页数:3
模拟电子技术基础知识反馈电路的稳定性分析与优化策略在模拟电子技术中,反馈电路是常见且重要的一种电路结构。
反馈电路起到稳定、放大和改善电路性能的作用。
本文将重点讨论反馈电路的稳定性分析与优化策略。
一、反馈电路的基本原理反馈电路是指将电路的一部分输出信号作为输入信号的一部分反馈给电路的输入端,以达到改变电路性能的目的。
在反馈电路中,主要存在两种类型的反馈:正反馈和负反馈。
正反馈会使电路产生振荡,不利于电路的稳定性,因此在大多数情况下,我们采用负反馈来实现电路的稳定性和放大性能的改善。
二、反馈电路的稳定性分析在分析反馈电路的稳定性时,我们通常关注两个方面:振荡和瞬态响应。
1. 振荡振荡是指电路在特定条件下产生的周期性输出。
为了避免振荡的发生,我们需对反馈电路的传递函数进行分析。
传递函数是描述输出与输入关系的函数,通常通过拉普拉斯变换来表示。
我们需要对传递函数的分母进行因式分解,找到所有导致传递函数极点的因素。
只有当所有的极点的实部为负数时,才能保证系统的稳定性。
2. 瞬态响应瞬态响应是指电路对输入信号的瞬时变化做出的响应。
反馈电路的瞬态响应与稳定性密切相关。
当输入信号发生变化时,电路的输出应该尽快达到稳定状态,而不产生过渡过程中的振荡或较长时间的衰减。
三、反馈电路的优化策略为了提高反馈电路的稳定性,我们可以采取以下优化策略:1. 设计合适的反馈网络反馈网络的设计是影响电路稳定性的关键。
我们需要选择合适的反馈网络来抑制系统的不稳定因素。
常见的反馈网络包括电压反馈和电流反馈,根据具体的电路要求来确定合适的反馈结构。
2. 控制增益和相位裕度增益和相位裕度是反馈电路稳定性的重要参数。
合适的增益和相位裕度可以保证电路稳定性,并减小不稳定性带来的影响。
通过设计合适的补偿电路来控制增益和相位裕度,是提高电路稳定性的重要手段。
3. 优化元件选择和布局正确选择和布局电路元件对于稳定性的提高也起到至关重要的作用。
合适的元件选择可以减小元件间的耦合和干扰,提高电路的抗干扰能力和稳定性。
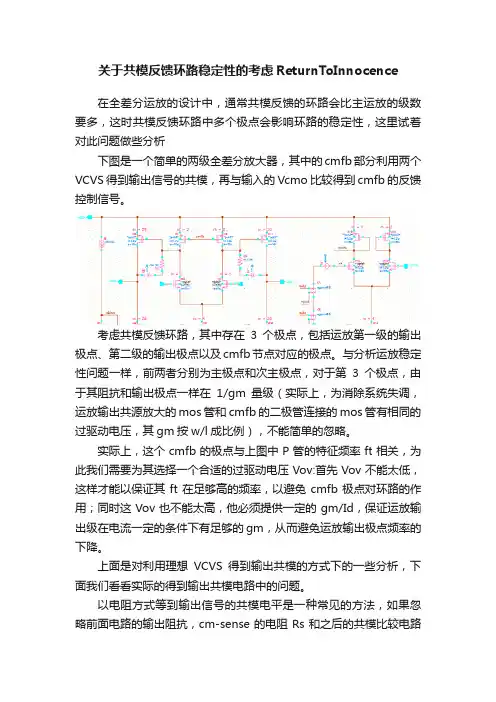
关于共模反馈环路稳定性的考虑ReturnToInnocence在全差分运放的设计中,通常共模反馈的环路会比主运放的级数要多,这时共模反馈环路中多个极点会影响环路的稳定性,这里试着对此问题做些分析下图是一个简单的两级全差分放大器,其中的cmfb部分利用两个VCVS得到输出信号的共模,再与输入的Vcmo比较得到cmfb的反馈控制信号。
考虑共模反馈环路,其中存在3个极点,包括运放第一级的输出极点、第二级的输出极点以及cmfb节点对应的极点。
与分析运放稳定性问题一样,前两者分别为主极点和次主极点,对于第3个极点,由于其阻抗和输出极点一样在1/gm量级(实际上,为消除系统失调,运放输出共源放大的mos管和cmfb的二极管连接的mos管有相同的过驱动电压,其gm按w/l成比例),不能简单的忽略。
实际上,这个cmfb的极点与上图中P管的特征频率ft相关,为此我们需要为其选择一个合适的过驱动电压Vov:首先Vov不能太低,这样才能以保证其ft在足够高的频率,以避免cmfb极点对环路的作用;同时这Vov也不能太高,他必须提供一定的gm/Id,保证运放输出级在电流一定的条件下有足够的gm,从而避免运放输出极点频率的下降。
上面是对利用理想VCVS得到输出共模的方式下的一些分析,下面我们看看实际的得到输出共模电路中的问题。
以电阻方式等到输出信号的共模电平是一种常见的方法,如果忽略前面电路的输出阻抗,cm-sense的电阻Rs和之后的共模比较电路的栅节点电容Cx会在共模反馈的环路中引入一个极点。
考虑到一般Rs 至少要在Rds量级以避免其对运放增益的衰减,这位个极点的位置不会太高,因此必须加以考虑。
实际中,可通过在电阻Rs上并联电容Cs 来减小这一极点的影响。
在上面的电路中, 通过简单的分析, 可以得到: 引入 Cs 之后, 由 cm-sense 部分引入的零极点为: Po=1/(Rs*(Cs+Cx)), Zo=1/(Rs*Cs), 即在极点之后补了一个零点来抵消其作用. 至于具体的 Cs 的取值, 考虑 Cs 至少与 Cx 比较接近, cmfb 环路才能得到一定的相位裕度, 若进一步考虑零极点对建立时间的影响, 应该将 Cs/Cx 取为一定值以上才能将零极点拉的足够近, 以减小这一零极点对对共模信号建立时间的影响。
一、复数知识1、复数的表示:2、电感的阻抗这两种无功元件在其电压电流之间会产生相移(滞后或者超前)3、电容的阻抗:jb a F *+=22||b a F +=arctan(ab =φLw X L *=cw X C *1=二、反馈控制基础知识:1、S 平面复平面:w j S *+=σ。
但是一般分析稳态,考虑稳态激励时,w j S *=。
增益和相位定义在稳态时2、波特图:波特图由两个图组成:一个是传递函数幅值(以db 表示)与对数频率之间的关系。
另一个是角度相位与对数频率之间的关系。
因为幅频特性图中,两个坐标都是用对数表示的,单极点(如电容阻抗,在零频率处的为无穷大),或者单一零点(如电感阻抗,在零频率处的为零)的传递函数其波特图是一条直线。
对数幅频特性|))(lg(|*20)(jw G w L =对数相频特性)(jw G ∠=ϕ单位为db/十倍频,横坐标是w 的对数,lg w 每增加单位长度(即w 每增加十倍时),纵坐标)(w L 减少20db ,故斜率为-20db/十倍频。
若x 轴和y 周围同比例刻度坐标,增益曲线将会与x 轴成-45度,此斜率也就为该角度的正切值,即为)45tan(°−=—1。
因此-20db/十倍频(-6/倍频)也称“—1”斜率。
注意这里说的“—1”斜率只是在横坐标和纵坐标取同比例刻度的坐标时成立的,即频率每变化十倍,增益减小十倍,即为“—1”斜率3、零极点:在稳定性设计中,我们对函数的这两部分很感兴趣:在什么参数(即频率)下,函数值为零,什么时候为无穷大。
这两个条件被称之为函数的零点和极点如果在任何一个频率点,闭环传递函数)(s G 为无穷大,也就是说,如果闭环传递函数有一个极点,那么变换器就是不稳定的。
传递函数只有当分母为零时才为无穷大传递函数中分母中含S ,若S 取特定值,可使分母等于0,传递函数则为无限大,定义这样的S 值为极点。
使传递函数分母等于0的S 的频率为谐振频率(或者转折频率),也就是极点位置。
环路稳定性分析范文环路稳定性分析是指对系统的闭环控制回路进行稳定性评估的一种方法。
在控制系统中,闭环控制回路的稳定性是一个至关重要的指标,它决定了系统的性能和可靠性。
在本文中,我将介绍环路稳定性的概念、常见的分析方法以及如何通过稳定性分析来优化系统的闭环控制回路。
闭环控制回路由控制器、系统和反馈组成。
控制器接收反馈信号,并根据系统的输出进行调整,以使系统的输出接近期望值。
为了确保控制系统的稳定性,必须满足闭环控制回路的极点位置位于左半平面。
根轨迹法是一种通过绘制系统的开环传递函数极点随控制器参数变化的路径来评估系统的稳定性的方法。
通过绘制根轨迹图,可以直观地观察系统的极点位置,从而判断系统是否稳定。
根轨迹法还可以通过调整控制器参数来优化系统的闭环控制回路。
频域法是一种使用频率响应函数来分析系统稳定性的方法。
通过将系统的传递函数表示为复频域上的表达式,我们可以使用频率响应函数来分析系统的频率特性和稳定性。
常见的频域法包括振荡饱和法和Bode图法。
这些方法可以用来评估系统的衰减比、相位裕度和增益裕度等指标,从而判断系统的稳定性。
状态空间法是一种使用系统的状态方程来分析稳定性的方法。
通过求解系统状态方程的特征根,可以判断系统的稳定性。
状态空间法是一种更为准确和全面的稳定性分析方法,它可以考虑系统的所有状态变量,并提供系统的详细动态特性信息。
在进行环路稳定性分析时,我们通常关注系统的相位裕度、增益裕度和衰减比等指标。
相位裕度是指系统的相位与临界相位之间的差距,是评估系统稳定性的重要指标。
增益裕度是指系统增益与临界增益之间的差距,也是判断系统稳定性的重要依据。
衰减比是指系统在闭环控制下输出与输入的幅值比值,它可以通过计算系统的频率响应函数来得到。
对于不稳定的系统,我们可以通过调整控制器参数、增加补偿网络或采取其他控制策略来提高系统的稳定性。
例如,可以通过增加比例增益、增加积分时间常数或增加滤波器来提高系统的稳定性。
电路中的反馈控制与稳定性分析反馈控制是电路设计中的重要概念,它可以帮助电路实现稳定的工作状态。
在电路中引入反馈,可以根据输出信号对输入信号进行调整,以达到我们期望的工作效果。
本文将探讨电路中的反馈控制与稳定性分析。
首先,我们来介绍反馈控制的基本概念。
电路中的反馈控制是指将一部分输出信号作为输入信号的参考,用来调节输入信号的大小或方向,以实现对电路工作状态的控制。
一般来说,反馈可以分为正反馈和负反馈两种。
正反馈是指输出信号与输入信号的相位一致,即输出信号会增强输入信号的变化。
在正反馈电路中,输入信号经过放大之后,输出信号又作为输入信号的一部分进行放大,使得输出信号的幅值逐渐增大,从而引起系统不稳定的问题。
因此,在实际电路设计中,正反馈往往需要通过其他方式来抑制其不稳定性。
相反,负反馈是指输出信号与输入信号的相位相反,即输出信号会抑制输入信号的变化。
在负反馈电路中,输出信号的一部分会与输入信号进行比较,根据比较结果调整输入信号的大小或方向。
这种调节可以使电路的工作状态更加稳定,因为输出信号的变化会被抑制,从而减小系统的波动。
稳定性是衡量电路工作状态稳定性的重要指标。
在电路中引入反馈可以提高电路的稳定性。
通过负反馈,我们可以将输出信号与期望信号进行比较,并根据比较结果对输入信号进行调节,使得输出信号逐渐趋近于期望信号。
在这个过程中,我们可以通过稳定性分析来评估电路的稳定性。
稳定性分析是指通过对电路的数学建模和分析,来判断电路是否稳定或者在何种条件下能够实现稳定。
常用的稳定性分析方法有极点分析法、频率响应法等。
通过这些方法,我们可以分析电路的传递函数和极点位置,从而得出电路的稳定性。
值得注意的是,在电路设计中,我们经常会遇到稳定性问题。
例如,在放大器中,如果稳定性设计不当,可能会出现震荡现象,导致输出信号不稳定。
因此,在电路设计过程中,我们需要充分考虑反馈控制的稳定性,并采取相应的措施来保证电路的稳定工作。
共模反馈笔记Return To Innocence咳咳,为了坚持更新,贴一篇以前对全差分运放的共模反馈的小结..关于全差分放大器对于全差分放大器,一般可以得到更大的swing (由于差分信号),同时可以实现对共模干扰、噪声以及偶数阶的非线性的抑制;但其需要有两个匹配的反馈网络,以及共模反馈电路顺便提一下,对于全差分的折叠共源共栅(folded cascode)放大器,需要注意转换速率(正向与负向)对输入对差分对的尾电流源和cascode电流源的考虑非主极点的位置–输入对管的drain节点(注意全差分没有镜像极点的问题..),如果考虑PMOS输入的结构,将会折叠到n管的cascode,从而减小此节点阻抗,提高此非主极点的频率;但是P输入结构亦有其问题,如直流增益和cmfb电路的速度(考虑cmfb控制的为cascode的pmos电流源)关于共模反馈CMFB从反馈环路来看,共模的稳定问题来源于闭环的共模增益:由于输入差分对的尾电流源的local-feedback,通常共模增益较小,导致运放无法控制其输出共模点;通过CMFB共模反馈电路,可以提高共模反馈环路的增益,以稳定共模信号。
设计CMFB需考虑补偿以减小环路的稳定时间(settling time)和提高稳定性。
从性能上,我们希望共模反馈的单位增益带宽足够大,但由于cmfb的环路相较于差模通路可能有更多高频极点,故此在一定的功耗要求下其UGB一般比较难做的高,有书中提到可以将其设计为差模UGB 的1/3一般共模反馈的方法是控制放大器的电流源,这里如果是folded-cascode的结构,可以考虑用cmfb控制cascode的电流源而不是输入差分对的电流源—-因其在共模环路中有较少的节点–>更容易补偿等..(另一种考虑是控制尾电流源可能导致共模增益的问题)另外,对于cmfb控制的尾电流源,常见将尾电流源分为两半,其中之一由cmfb控制,另一半接恒定偏置电流;这种结构的具体分析可见Gray书12.4.2节的内容,简单来说,single-stage的opamp中控制尾电流源的cmfb结构,其UGB 主要为gmt/CL, 其中gmt为尾电流源的跨导,这里拆分尾电流源来减半cmc共模控制的部分,这样UGB减小,即缩减带宽来提升共模反馈环路的相位裕度,当然cmfb的增益相应也减小了;另外恒定偏置部分也可帮助共模电压的初始建立,减小cmfb大的扰动。
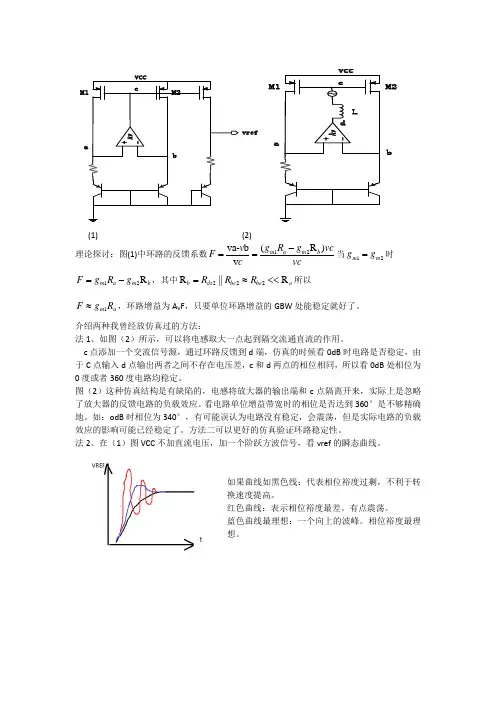
vrefbM2(1) (2)理论探讨:图(1)中环路的反馈系数12(R)va-bvm a m bg R g vcvFc vc-==当12m mg g=时12Rm a m bF g R g=-,其中222R||Rb ds be be aR R R=≈<<所以1m aF g R≈,环路增益为A V F,只要单位环路增益的GBW处能稳定就好了。
介绍两种我曾经放仿真过的方法:法1、如图(2)所示,可以将电感取大一点起到隔交流通直流的作用。
c点添加一个交流信号源,通过环路反馈到d端,仿真的时候看0dB时电路是否稳定,由于C点输入d点输出两者之间不存在电压差,c和d两点的相位相同,所以看0dB处相位为0度或者360度电路均稳定。
图(2)这种仿真结构是有缺陷的,电感将放大器的输出端和c点隔离开来,实际上是忽略了放大器的反馈电路的负载效应。
看电路单位增益带宽时的相位是否达到360°是不够精确地。
如:odB时相位为340°,有可能误认为电路没有稳定,会震荡,但是实际电路的负载效应的影响可能已经稳定了。
方法二可以更好的仿真验证环路稳定性。
法2、在(1)图VCC不加直流电压,加一个阶跃方波信号,看vref的瞬态曲线。
如果曲线如黑色线:代表相位裕度过剩,不利于转换速度提高。
红色曲线:表示相位裕度最差。
有点震荡。
蓝色曲线最理想:一个向上的波峰。
相位裕度最理想。
运算放大器的稳定性4―环路稳定性主要技巧与经验运算放大器的稳定性第4部分(共15部分):环路稳定性主要技巧与经验作者:Tim Green,TI公司本系列的第4部分着重讨论了环路稳定性的主要技巧与经验。
首先,我们将讨论45度相位及环路增益带宽准则,考察了在Aol 曲线与1/β曲线以及环路增益曲线Aolβ中的极点与零点之间的互相转化关系。
我们还将讨论用于环路增益稳定性分析的频率“十倍频程准则”。
这些十倍频程准则将被用于1/β、Aol及Aolβ曲线。
我们将给出运放输入网络ZI与反馈网络ZF的幅度“十倍频程准则”。
我们将开发一种用于在1/β曲线上绘制双反馈路径的技术,并将解释为何在使用双反馈路径时应该避免出现“BIG NOT”这种特殊情况。
最后,我们将给出一种便于使用的实际稳定性测试方法。
在本系列的第5部分中,这些关键工具的综合使用使我们能够系统而方便地稳定一个带有复杂反馈电路的实际运放应用。
环路增益带宽准则已确立的环路稳定性标准要求在fcl处相移必须小于180度,fcl是环路增益降为零时的频率。
在fcl处的相移与整个180度相移之间的差定义为相位余量。
图4.0详细给出了建议用于实际电路的经验,亦即在整个环路增益带宽(f≤fcl)中设计得到135度的相移(对应于45度的相位余量)。
这是考虑到,在实际电路中存在着功率上升、下降及瞬态情况,在这些情况下,运放在Aol曲线上的改变可能会导致瞬态振荡。
而这种情况在功率运放电路中是特别不希望看到的。
由于存在寄生电容与印制板布局寄生效应,因此这种经验还考虑在环路增益带宽中用额外的相位余量来考虑实际电路中的附加相移的。
此外,当环路增益带宽中相位余量小于45度时,即可能在闭环传输函数中导致不必要的尖峰。
相位余量越低及越靠近fcl,则闭环尖峰就会越明显。
180135-135oFrequency90(Hz)450-45Loop Stability Criteria:<-180 degree phase shift at fcl -135 degree phase shift at all frequencies <fcl Why?: Because Aolis not always “Typical” Power-up, Power-down,Power-trans ient ?Undefined “Typical”Aol Allows for phase shift due to real world Layout & Component Parasitics图4.0:环路增益带宽准则图字(上下、左右):Aolβ(环路增益)相位曲线、-135°“相移”、频率(Hz)、45°“相位余量”环路稳定性标准:在fcl处相移< -180度θ设计目的:在所有< fcl的频率上,都有相移≤-135度原因:因为Aol(开环增益)并不总是“典型”,考虑到实际电路布局与器件的寄生效应,存在着功率上升、下降及暂态现象→这些是未定义的“典型”Aol。
多环路稳定性的一些新思考和新结论之前存疑的问题有几个,其中一个是:对于复杂的多环路系统,如何判断稳定性,当时没有想到好的方法,而只想到对具有公共节点的系统,可以在该节点断开环路。
今天看来,这个结论似乎不完全准确。
首先需要一些预备知识。
除了我们熟悉的传输函数,在信号与系统里还给出了状态变量法。
从状态变量法可以知道,在任何一个系统中,任何两点之间的传输函数都存在唯一的一个多项式作为分母。
因此用这个分母就可以作为判断系统稳定性的依据。
这和传输函数中的环路增益其实是完全等效的。
之前的难点就在于这个环路增益如何给出。
纯用梅森公式没问题,但是对我们电路设计者来说没意义。
最近的结论就是在这方面有所想法:如果在系统的任意一个位置断开并插入一个激励,那么可以知道输出就是A/(1+L),而A=1,因此用这个方法就可以得到环路增益L。
这与以前传统的单环路方法是完全一致的,因此这里的结论就只是说:以前的方法在现在仍然可以用,不用在意什么单环路多环路。
上面的结论看起来与我之前的一些结论矛盾,但再仔细思考下去就能发现一个更重要的问题。
之前之所以把多环路专门提出了,就是因为在多环路仿真中发现了一些特殊的现象:在不同位置断开对环路增益有影响。
大家不妨自己构建一个多环路的系统去亲自计算一下。
当构建好这个多环路系统后,不妨再算一算令分母为0的多项式,看看有什么特点。
在此可以提出一个新的结论:系统的稳定性与系统的稳定性表现是两个完全不同的概念。
这是我现造的两个概念,目的是为了区分两件事:系统是否稳定(在闭环情况下是否有右极点),系统在闭环后受到激励的表现(是否有过冲,是否有长时间震荡等)。
对第一件事情,只有唯一的一个判据,就是奈奎斯特判据。
这就等效于观察上面让计算的分母为0的多项式。
不同的环路增益有不同的曲线,但是他们有一个共同点,就是如果其中一个曲线能取-1的值,那么其他所有的曲线也必须能取到-1。
对第二件事情,在正常情况下我们喜欢用phase margin之类的值来判断。
反馈电路及稳定性分析反馈电路是电子系统中常见的一种电路结构,它通过将一部分输出信号引入到输入端,产生一种反馈效应,从而影响系统的性能和稳定性。
在本文中,我们将对反馈电路及其稳定性进行深入的分析和讨论。
I. 反馈电路的基本原理反馈电路可以分为正反馈和负反馈两种类型。
正反馈会使电路的增益增大,而负反馈则会使增益减小。
在实际应用中,常常采用负反馈电路,以稳定系统的性能。
负反馈电路可以进一步分为串联反馈和并联反馈。
串联反馈是将一部分输出信号与输入信号串联连接,而并联反馈则是将输入和输出信号通过一个反馈网络进行并联连接。
根据反馈电路的拓扑结构和元件参数,我们可以得到不同类型的反馈电路,比如电压反馈、电流反馈、共模反馈等。
II. 反馈电路的稳定性分析稳定性是评估电子系统性能的一个重要指标。
在反馈电路中,反馈网络的引入可以影响电路的稳定性。
如果反馈电路不稳定,就会出现自激振荡、爆震等问题,导致系统无法正常工作。
为了分析反馈电路的稳定性,我们常用的工具是稳定性判据。
其中最为常用的是Nyquist稳定性判据和Bode稳定性判据。
Nyquist稳定性判据通过绘制Nyquist图来判断系统的稳定性,而Bode稳定性判据则通过绘制开环和闭环的频率响应曲线来评估系统的稳定性。
除了判据,我们还可以利用线性系统理论中的传递函数来进行稳定性分析。
传递函数是反馈电路中输入和输出之间的比例关系,通过对传递函数进行频域分析,可以得到系统的稳定性条件。
III. 稳定性改善技术当反馈电路的稳定性存在问题时,我们可以采取一些措施来改善。
常见的稳定性改善技术包括:1. 增加相位裕度:通过在电路中引入相位校正网络或者选择合适的元件参数,可以增加系统的相位裕度,从而提高稳定性。
2. 设计合适的补偿网络:根据系统的传递函数和频率响应特性,设计合适的补偿网络可以抵消系统中的不稳定因素,使系统更加稳定。
3. 优化反馈网络:通过优化反馈网络的拓扑结构和参数配置,可以降低系统的噪声、增加带宽等,提高系统的稳定性。
共模反馈环路稳定性分析及电路设计
0 引言
全差分运放(fully differential operation)相对于单端输出电路来说,不仅输出摆幅更大、共模噪声抑制更好,还能消除高阶谐波失真。
然而,在高增益运放中,输出共模电平对器件的特性和失配相当敏感,而且不能通过差模反馈来达到稳定。
因此,必须额外引入负反馈机制,即共模反馈(CMFB)来稳定运放
的共模输出电平。
共模反馈的基本原理是先通过检测网络得到输出共模电平
Vo_cn,然后将Vo_cn 和一个参考电压Vcn(一般为电源电压的一半)相比较,再用得出的误差信号来调节运放的偏置电流,从而达到使输出共模信号稳定的目的。
这种方式的设计要点如下:
(1)共模信号检测应具有线性特性;
(2)共模反馈环路的增益必须尽可能的高;
(3)反馈环路的带宽不能小于差模通路(在许多实际应用中,这两个带宽
必须一致);
(4)确保共模环路稳定;
(5)应引入保护机制,以避免锁死状态的出现(输出保持在电源电压的情况)。
目前已经有了大量关于差模反馈环路稳定性的理论研究,而对于共模反馈环路的研究却很少。
现有的共模反馈电路的设计更多的是通过实际经验、反复调试来得到稳定环路。
笔者通过对最常用的、采用一级共模反馈的两级运放的环路进行稳定性分析,明确得出了其稳定条件,从而理论化了共模反馈电路的设计。
然后基于这个条件,并采用Bi-CMOS 工艺设计了一种低成本、高稳定、匹配好的共模反馈电路。
整个运放可应用于一款高性能音频CLASS-D 芯。
电路基础原理电路的反馈与稳定性电路基础原理:电路的反馈与稳定性在电路学的世界中,电路的反馈与稳定性是一个重要的概念。
反馈是指将电路的输出信号再次引入到输入端,从而影响电路的工作状态和性能。
稳定性则是指电路在经过一段时间的工作后,能够保持其预期的性能和行为。
本文将介绍电路的反馈原理和稳定性问题。
一、正反馈和负反馈反馈可以分为正反馈和负反馈两种形式。
正反馈是指当输出信号反馈到输入端时,会使得输入信号增大。
这种反馈方式一般用于产生振荡信号或非线性处理。
例如,正反馈电路常常用于振荡器的设计中,通过不断放大输出信号,使得电路产生稳定的振荡。
相比之下,负反馈是指当输出信号反馈到输入端时,会使得输入信号减小。
这种反馈方式常用于增益的控制和稳定性的提高。
通过负反馈,可以使得电路的输出稳定在一个相对稳定的目标值附近。
所以说,负反馈是电子系统中最为常见和重要的一种反馈方式。
二、负反馈的作用与类型负反馈在电子系统中有着广泛的应用。
它可以改变电路的传输函数,降低非线性失真、提高幅频特性等。
此外,负反馈还可以提高电路的稳定性和可靠性,减小温度漂移、补偿参数变化等。
根据反馈的连接方式,负反馈可以分为电压反馈和电流反馈两种类型。
电压反馈是指将输出电压反馈到输入端,通过改变电路的增益来实现稳定性。
电压反馈常用于放大器的设计中。
而电流反馈则是指将输出电流反馈到输入端,通过调整电路的输入电流来实现稳定性。
电流反馈常用于运算放大器等场合。
三、稳定性问题与补偿措施虽然负反馈可以提高电路的稳定性,但是在实际应用中,仍然存在不稳定的问题。
其中一个重要的原因是电子元器件的色散。
色散是指元器件的参数随着工作时间、温度等因素的变化而变化,导致电路的性能发生变化。
为了解决稳定性问题,可以采取一些补偿措施。
例如,可以通过添加频率补偿电路来抵消传输函数中的零点和极点。
另外,还可以采用主动补偿技术,如频率补偿方法和相位补偿方法来提高电路的稳定性。
除了电子元器件的色散,还有一些其他因素也会影响电路的稳定性。
共模反馈电路运放设计要求共模反馈电路是一种重要的运放电路,它具有良好的共模抑制能力,广泛应用于电子技术领域。
为了保证共模反馈电路的性能和稳定性,设计人员需要遵循一定的设计要求,下面将从几个方面进行阐述。
1.运放的选择共模反馈电路的核心是运放,因此运放的选择非常重要。
一般来说,应选用具有高输入阻抗、低噪声、低温漂、高增益、良好的共模抑制特性的运放。
常用的运放有AD620、OPA114、AD822等,根据具体的应用场合选择合适的运放是保证共模反馈电路性能和稳定性的基础。
2.反馈电路的稳定共模反馈电路需要保持稳定的工作状态,否则会引起输出信号的失真和不稳定。
设计人员需要对反馈电路进行稳定性分析和仿真,选择合适的反馈电阻和补偿电容,以保证反馈电路的稳定性。
此外,还需要将反馈电路安装在紧凑的PCB板上,采取有效的屏蔽措施,以减少对外界干扰的敏感度。
3.输入和输出的阻抗匹配共模反馈电路输入和输出的阻抗匹配非常重要,变化的输入和输出阻抗会导致反馈电路的失真和不稳定。
因此,设计人员需要采取一些措施来保证输入和输出的阻抗匹配,如使用低噪声、高阻抗的输入放大器和低输出阻抗的输出驱动器,以及合理的布局和连接方式等。
4.降噪和滤波共模反馈电路需要具有较好的降噪和滤波能力,以提高信号的纯度和减少噪声的影响。
为此,设计人员可以采用一些滤波电路和降噪技术,如低通滤波器、带通滤波器、微信噪声降低等。
综上所述,共模反馈电路设计要求包括选择合适的运放、稳定的反馈电路、输入输出阻抗匹配、降噪和滤波等多个方面,通过科学合理的设计和精心的实施,可以使共模反馈电路具有更好的性能和稳定性,为其在电子技术领域的应用提供有力的保障。
关于共模反馈环路稳定性的考虑 | Return To Innocence
收藏人:mzsm
2014-10-13 | 阅:转:| 来源| 分享
在全差分运放的设计中,通常共模反馈的环路会比主运放的级数要多,这时共模反馈环路中多个极点会影响环路的稳定性,这里试着对此问题做些分析
下图是一个简单的两级全差分放大器,其中的cmfb部分利用两个VCVS得到输出信号的共模,再与输入的Vcmo比较得到cmfb的反馈控制信号。
考虑共模反馈环路,其中存在3个极点,包括运放第一级的输出极点、第二级的输出极点以及cmfb节点对应的极点。
与分析运放稳定性问题一样,前两者分别为主极点和次主极点,对于第3个极点,由于其阻抗和输出极点一样在1/gm量级(实际上,为消除系统失调,运放输出共源放大的mos管和cmfb的二极管连接的mos管有相同的过驱动电压,其gm按w/l成比例),不能简单的忽略。
实际上,这个cmfb的极点与上图中P管的特征频率ft相关,为此我们需要为其选择一个合适的过驱动电压Vov:首先Vov不能太低,这样才能以保证其ft在足够高的频率,以避免cmfb极点对环路的作用;同时这Vov也不能太高,他必须提供一定的gm/Id,保证运放输出级在电流一定的条件下有足够的gm,从而避免运放输出极点频率的下降。
上面是对利用理想VCVS得到输出共模的方式下的一些分析,下面我们看看实际的得到输出共模电路中的问题。
以电阻方式等到输出信号的共模电平是一种常见的方法,如果忽略前面电路的输出阻抗,
cm-sense的电阻Rs和之后的共模比较电路的栅节点电容Cx会在共模反馈的环路中引入一个极点。
考虑到一般Rs至少要在Rds量级以避免其对运放增益的衰减,这位个极点的位置不会太高,因此必须加以考虑。
实际中,可通过在电阻Rs上并联电容Cs来减小这一极点的影响。
在上面的电路中, 通过简单的分析, 可以得到: 引入 Cs 之后, 由 cm-sense 部分引入的零极
点为: Po=1/(Rs*(Cs+Cx)), Zo=1/(Rs*Cs), 即在极点之后补了一个零点来抵消其作用. 至于具
体的 Cs 的取值, 考虑 Cs 至少与 Cx 比较接近, cmfb 环路才能得到一定的相位裕度, 若进一
步考虑零极点对建立时间的影响, 应该将 Cs/Cx 取为一定值以上才能将零极点拉的足够近, 以
减小这一零极点对对共模信号建立时间的影响。
直接仿真DC吗?仿过了,所有管子都在饱和区,且输出的共模电平就是所需要的1/2VDD……我还
有两个疑惑:一是开环仿真的相位裕度不能说明运放接成闭环也是稳定的吗?不是说开环相当于反馈系
数是1时的相位裕度,这种情况是最恶劣的,如果能满足相位裕度,能否说明闭环系统也能稳定?
二是开环仿共模反馈环路的相位裕度,也是足够的,它能说明运放在闭环使用的时候共模反馈环路还是稳定的吗?。