自动控制原理第三章12
- 格式:ppt
- 大小:845.50 KB
- 文档页数:10
3-1设系统的微分方程式如下:(1)0.2c(t) 2r(t)单位脉冲响应:C(s) 10/s g(t) 103t3 3tc(t) 1 e cos4t e si n4t413-2 温度计的传递函数为 —,用其测量容器内的水温,1min 才能显示出该温度的Ts 198%的数值。
若加热容器使水温按 10(C/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数由一阶系统阶跃响应特性可知: c(4T) 98 o o ,因此有 4T 1 min ,得出T 0.25 min 。
视温度计为单位反馈系统,则开环传递函数为(s)1K 1TG(s)—1(s) Tsv 1用静态误差系数法,当r(t) 10t 时,e ss10 10T 2.5 C oK(2) 0.04c(t)0.24c(t) c(t)r(t)试求系统闭环传递函数① 部初始条件为零。
解:(s),以及系统的单位脉冲响应 g(t)和单位阶跃响应 c(t)。
已知全(1)因为 0.2sC(s)2R(s) 闭环传递函数(s)C(s) 10R(s) s单位阶跃响应c(t) C(s) 10/s 2c(t) 10t t 0(2) (0.04s 20.24s 1)C(s) R(s)C (s )闭环传递函数(s)C(s) R(s)120.04s0.24s 1单位脉冲响应:C(s)120.04s 2 0.24s 1g(t)25 e 33tsi n4t单位阶跃响应h(t) C(s)25 s[(s 3)216]1 s 6 s (s 3)216(s)1 Ts 1解法二依题意,系统误差疋义为e(t) r(t) c(t),应有e(s)E(s)1 C(s)R(s)11 TsR(s) Ts 1 Ts 13-3 已知二阶系统的单位阶跃响应为c(t) 10 12.5e 1.2t sin(1.6t 53.1o)试求系统的超调量c%、峰值时间t p和调节时间t'si n( 1n t )t p Jl- 1.96(s■1 2n1.63.5 3.5t s 2.92(s)n 1.2或:先根据c(t)求出系统传函,再得到特征参数,带入公式求解指标。
3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C `闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s C t e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK !用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T sTs Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 203-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。

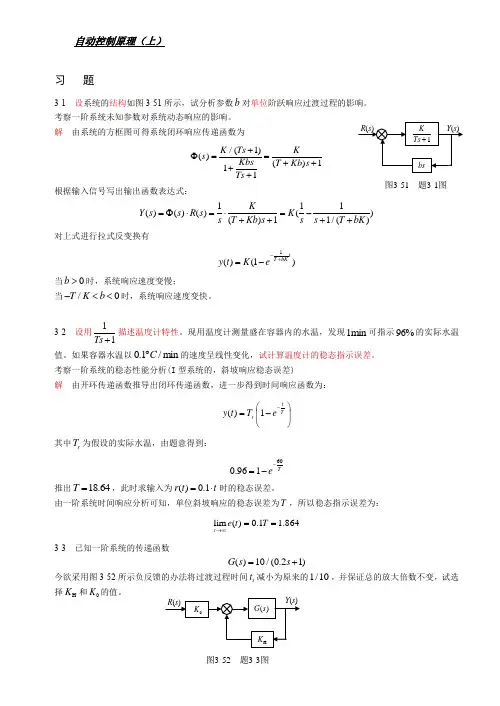
自动控制原理(上)习 题3-1 设系统的结构如图3-51所示,试分析参数b 对单位阶跃响应过渡过程的影响。
考察一阶系统未知参数对系统动态响应的影响。
解 由系统的方框图可得系统闭环响应传递函数为/(1)()()111K Ts Ks Kbs T Kb s Ts +Φ==++++ 根据输入信号写出输出函数表达式:111()()()()()11/()K Y s s R s K s T Kb s s s T bK =Φ⋅=⋅=-++++对上式进行拉式反变换有1()(1)t T bKy t K e-+=-当0b >时,系统响应速度变慢;当/0T K b -<<时,系统响应速度变快。
3-2 设用11Ts +描述温度计特性。
现用温度计测量盛在容器内的水温,发现1min 可指示96%的实际水温值。
如果容器水温以0.1/min C ︒的速度呈线性变化,试计算温度计的稳态指示误差。
考察一阶系统的稳态性能分析(I 型系统的,斜坡响应稳态误差)解 由开环传递函数推导出闭环传递函数,进一步得到时间响应函数为:()1t T r y t T e -⎛⎫=- ⎪⎝⎭其中r T 为假设的实际水温,由题意得到:600.961Te-=-推出18.64T =,此时求输入为()0.1r t t =⋅时的稳态误差。
由一阶系统时间响应分析可知,单位斜坡响应的稳态误差为T ,所以稳态指示误差为:lim ()0.1 1.864t e t T →∞==3-3 已知一阶系统的传递函数()10/(0.21)G s s =+今欲采用图3-52所示负反馈的办法将过渡过程时间s t 减小为原来的1/10,并保证总的放大倍数不变,试选择H K 和0K 的值。
解 一阶系统的调节时间s t 与时间常数成正比,则根据要求可知总的传递函数为10()(0.2/101)s s Φ=+由图可知系统的闭环传递函数为000(10()()1()0.211010110()0.21110H HHHK G s K Y s R s K G s s K K K s s K ==++++==Φ++)比较系数有101011011010HHK K K ⎧=⎪+⎨⎪+=⎩ 解得00.9,10H K K ==3-4 已知二阶系统的单位阶跃响应为1.5()1012sin(1.6+53.1t y t e t -=-)试求系统的超调量%σ,峰值时间p t ,上升时间r t 和调节时间s t 。
例3-1 系统的结构图如图3-1所示。
已知传递函数 )12.0/(10)(+=s s G 。
今欲采用加负反馈的办法,将过渡过程时间t s减小为原来的倍,并保证总放大系数不变。
试确定参数K h 和K 0的数值。
解 首先求出系统的传递函数φ(s ),并整理为标准式,然后与指标、参数的条件对照。
一阶系统的过渡过程时间t s 与其时间常数成正比。
根据要求,总传递函数应为)110/2.0(10)(+=s s φ即HH K s K s G K s G K s R s C 1012.010)(1)()()(00++=+= )()11012.0(101100s s K K K HHφ=+++=比较系数得⎪⎩⎪⎨⎧=+=+1010110101100H HK K K 解之得9.0=H K 、100=K解毕。
例3-10 某系统在输入信号r (t )=(1+t )1(t )作用下,测得输出响应为:t e t t c 109.0)9.0()(--+= (t ≥0)已知初始条件为零,试求系统的传递函数)(s φ。
解 因为22111)(ss s s s R +=+=)10()1(10109.09.01)]([)(22++=+-+==s s s s s s t c L s C 故系统传递函数为11.01)()()(+==s s R s C s φ 解毕。
例3-3 设控制系统如图3-2所示。
试分析参数b 的取值对系统阶跃响应动态性能的影响。
解 由图得闭环传递函数为1)()(++=s bK T Ks φ系统是一阶的。
动态性能指标为)(3)(2.2)(69.0bK T t bK T t bK T t s r d +=+=+= 因此,b 的取值大将会使阶跃响应的延迟时间、上升时间和调节时间都加长。
解毕。
例 3-12 设二阶控制系统的单位阶跃响应曲线如图3-34所示。
试确定系统的传递函数。
解 首先明显看出,在单位阶跃作用下响应的稳态值为3,故此系统的增益不是1,4 30 t图3-34 二阶控制系统的单位阶跃h (t )而是3。
自动控制原理(孟华)第3章习题解答自动控制原理(孟华)的习题答案。
3.1.已知系统的单位阶跃响应为c(t) 1 0.2e 60t 1.2e 10t试求:(1)系统的闭环传递函数Φ(s)=?(2) 阻尼比ζ=?无自然振荡频率ωn=?解:(1)由c(t)得系统的单位脉冲响应为g(t) 12e 60t 12e 10t (t 0)(s) L[g(t)] 12__12 2 s 10s 60s 70s 6002n(2)与标准(s) 2对比得:2s 2 n nn 600 24.5,702 6001.4293.2.设图3.36 (a)所示系统的单位阶跃响应如图3.36 (b)所示。
试确定系统参数K1,K2和a。
(a) (b)图3.36 习题3.2图解:系统的传递函数为K12 nK1K2s(s a)W(s) K2 2 K2 2K1s as K1s 2 n n1s(s a)又由图可知:超调量Mp4 3133峰值时间tp 0.1 s自动控制原理(孟华)的习题答案。
代入得2n K1 1 21e30.1 2 n K K2解得:ln32;0.33,n10 2233.3,K1 n 1108.89,a 2 n 2 0.33 33.3 21.98,K2 K 3。
3.3. 给定典型二阶系统的设计性能指标:超调量p 5%,调节时间ts 3s,峰值时间tp 1s,试确定系统极点配置的区域,以获得预期的响应特性。
解:设该二阶系统的开环传递函数为2nG sss 2 n 20.05 p e33 则满足上述设计性能指标:ts nt 1 p2n得:0.69,n 1 n2由上述各不等式得系统极点配置的区域如下图阴影部分所示:自动控制原理(孟华)的习题答案。
3.4.设一系统如图3.37所示。
(a)求闭环传递函数C(s)/R(s),并在S平面上画出零极点分布图;(b)当r(t)为单位阶跃函数时,求c(t)并做出c(t)与t的关系曲线。
图3.37 习题3.4图解:(a)系统框图化简之后有C(s)2 s2 R(s)s 0.5s 2.252 s(s35j)(s j)22z1 2,s1,2零极点分布图如下:35j 2自动控制原理(孟华)的习题答案。
3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC = 闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
第3章 控制系统的时域分析【基本要求】1. 掌握时域响应的基本概念,正确理解系统时域响应的五种主要性能指标;2. 掌握一阶系统的数学模型和典型时域响应的特点,并能熟练计算其性能指标和结构参数;3. 掌握二阶系统的数学模型和典型时域响应的特点,并能熟练计算其欠阻尼情况下的性能指标和结构参数;4. 掌握稳定性的定义以及线性定常系统稳定的充要条件,熟练应用劳斯判据判定系统稳定性;5. 正确理解稳态误差的定义,并掌握系统稳态误差、扰动稳态误差的计算方法。
微分方程和传递函数是控制系统的常用数学模型,在确定了控制系统的数学模型后,就可以对已知的控制系统进行性能分析,从而得出改进系统性能的方法。
对于线性定常系统,常用的分析方法有时域分析法、根轨迹分析法和频域分析法。
本章研究时域分析方法,包括简单系统的动态性能和稳态性能分析、稳定性分析、稳态误差分析以及高阶系统运动特性的近似分析等。
根轨迹分析法和频域分析法将分别在本书的第四章和第五章进行学习。
这里先引入时域分析法的基本概念。
所谓控制系统时域分析方法,就是给控制系统施加一个特定的输入信号,通过分析控制系统的输出响应对系统的性能进行分析。
由于系统的输出变量一般是时间t 的函数,故称这种响应为时域响应,这种分析方法被称为时域分析法。
当然,不同的方法有不同的特点和适用范围,但比较而言,时域分析法是一种直接在时间域中对系统进行分析的方法,具有直观、准确的优点,并且可以提供系统时间响应的全部信息。
3.1 系统的时域响应及其性能指标为了对控制系统的性能进行评价,需要首先研究系统在典型输入信号作用下的时域响应过程及其性能指标。
下面先介绍常用的典型输入信号。
3.1.1 典型输入信号由于系统的动态响应既取决于系统本身的结构和参数,又与其输入信号的形式和大小有关,而控制系统的实际输入信号往往是未知的。
为了便于对系统进行分析和设计,同时也为了便于对各种控制系统的性能进行评价和比较,需要假定一些基本的输入函数形式,称之为典型输入信号。
3-1 设系统特征方程式:4322101000s s Ts s ++++=试按稳定要求确定T 的取值范围。
解:利用劳斯稳定判据来判断系统的稳定性,列出劳斯列表如下:4321011002105100(10250)/(5)100s T s s T s T T s ---欲使系统稳定,须有5025102500T T T ->⎧⇒>⎨->⎩ 故当T>25时,系统是稳定的。
3-2 已知单位负反馈控制系统的开环传递函数如下,试分别求出当输入信号为,21(),t t t 和 时,系统的稳态误差(),()().ssp ssv ssa e e e ∞∞∞和22107(1)8(0.51)(1)()(2)()(3)()(0.11)(0.51)(4)(22)(0.11)s s D s D s D s s s s s s s s s ++===++++++解:(1)根据系统的开环传递函数可知系统的特征方程为: ()(0.11)(0.51)100.050.6110D s sz s s s =+++=++=由赫尔维茨判据可知,n=2且各项系数为正,因此系统是稳定的。
由G(s)可知,系统是0型系统,且K=10,故系统在21(),t t t 和输入信号作用下的稳态误差分别为: 11(),(),()111ssp ssv ssa e e e K ∞==∞=∞∞=∞+ (2)根据系统的开环传递函数可知系统的特征方程为: 432()6101570D s s s s s =++++=由赫尔维茨判据可知,n=2且各项系数为正,且2212032143450,/16.8a a a a a a a ∆=-=>∆>=以及,因此系统是稳定的。
227(1)(7/8)(1)()(4)(22)s(0.25s+4)(0.5s 1)s s D s s s s s s ++==+++++由G(s)可知,系统式I 型系统,且K=7/8,故系统在21(),t t t 和 信号作用下的稳态误差分别为:()0,()1/,()ssp ssv ssa e e K e ∞=∞=∞=∞ (3)根据系统的开环传递函数可知系统的特征方程为: 32()0.1480D s s s s =+++=由赫尔维茨判据可知,n=2且各项系数为正,且21203 3.20a a a a ∆=-=>因此系统是稳定的。
三 时域分析法2-3-1 若某系统,当零初始条件下的单位阶跃响应为t t e e t c --+-=21)(试求系统的传递函数和脉冲响应。
【解】 传递函数:[][])2)(1(24)()()(1)()(,)2)(1(24)()(22++++====++++==s s s s s R s c s G st r L s R s s s s s t c L s c单位脉冲响应: )0(2)()]([)(21≥+-==---t e e t s G L t g tt δ2-3-2 二阶系统单位阶跃响应曲线如图所示,试确定系统开环传递函数。
设系统为单位负反馈式。
【解】 23.351.01456.02.0%100%212≈⇒=-==⇒=⨯=--n n p t e ωωξπξσξξπ系统的开环传递函数为:)2.32(1246)2()(2+=+=s s s s s G n n k ξωω2-2-3 已知系统的结构图如图所示(1)当0=d k 时,求系统的阻尼比ξ,无阻尼振荡频率n ω和单位斜坡输入时的稳态误差;(2)确定d k 以使707.0=ξ,并求此时当输入为单位斜坡函数时系统的稳态误差。
【解】(1)0=d k 时 )2(8)(+=s s s G K⎪⎩⎪⎨⎧==⇒⎪⎩⎪⎨⎧==⇒42222282ξωξωωn n n )121(4)2(8)(+=+=s s s s s G K 系统为Ⅰ型 25.014==⇒=Vss V K e K (2)0≠d k 时题2-3-2图.1⎪⎩⎪⎨⎧===⇒⎪⎩⎪⎨⎧=+==⇒++=+++=4183.222707.0)41(228)]41(2[8)2(81)2(8)(2d n d n n d d K k k k s s s k s s s G ωξξωω ,1)125.0(2)4(8)(=⇒+=+=v s s s s s G K Ⅰ型系统,5.01,2==⇒=Vss V K e K3-4温,发现需30s 时间指出实际水温的95%的数值。