自动控制原理第三章习题参考答案精品PPT课件
- 格式:pptx
- 大小:674.41 KB
- 文档页数:15
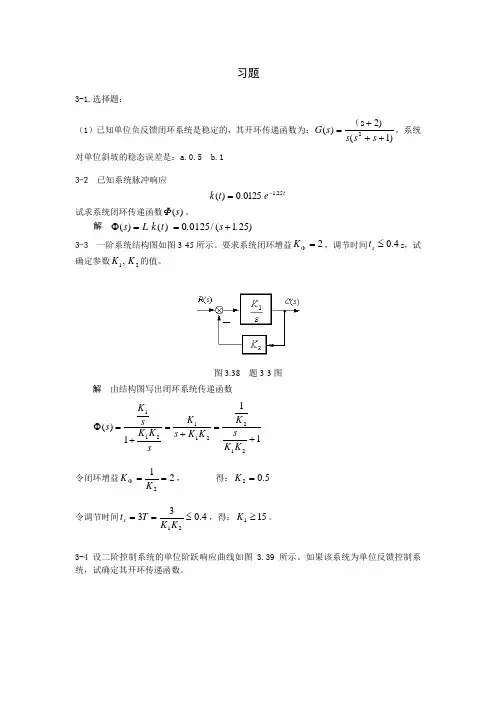
习题3-1.选择题:(1)已知单位负反馈闭环系统是稳定的,其开环传递函数为:)1(2)s )(2+++=s s s s G (,系统对单位斜坡的稳态误差是:a.0.5 b.1 3-2 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+001251253-3 一阶系统结构图如图3-45所示。
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
图3.38 题3-3图解 由结构图写出闭环系统传递函数111)(212211211+=+=+=ΦK K sK K K s K sK K s K s令闭环增益212==ΦK K , 得:5.02=K 令调节时间4.03321≤==K K T t s ,得:151≥K 。
3-4 设二阶控制系统的单位阶跃响应曲线如图 3.39 所示。
如果该系统为单位反馈控制系统,试确定其开环传递函数。
图3.39 题3-4图 解:由图2.8知,开环传递函数为3-5 设角速度指示随动统结构图如图3-40所示。
若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K 应取何值,调节时间s t 是多少?图3-40 题3-5图解:依题意应取 1=ξ,这时可设闭环极点为02,11T -=λ。
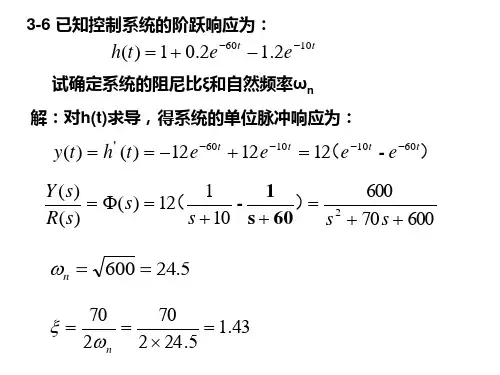
写出系统闭环传递函数Ks s Ks 101010)(2++=Φ 闭环特征多项式20022021211010)(⎪⎪⎭⎫ ⎝⎛++=⎪⎪⎭⎫ ⎝⎛+=++=T s T s T s K s s s D 比较系数有 ⎪⎪⎩⎪⎪⎨⎧=⎪⎪⎭⎫ ⎝⎛=K T T 101102200 联立求解得 ⎩⎨⎧==5.22.00K T 因此有 159.075.40''<''==T t s3-6 图3.41所示为某控制系统结构图,是选择参数K 1和K 2,使系统的ωn =6,ξ=1.3-7 已知系统的特征方程,试判别系统的稳定性,并确定在右半s 平面根的个数及纯虚根。

3-1(1) )(2)(2.0t r t c= (2) )()()(24.0)(04.0t r t c t c t c=++ 试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Ts s s s G 1)(1)()(=Φ-Φ= ⎩⎨⎧==11v T K用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
解法二 依题意,系统误差定义为 )()()(t c t r t e -=,应有 1111)()(1)()()(+=+-=-==ΦTs TsTs s R s C s R s E s e C T s Ts Ts ss R s s e s e s ss ︒==⋅+=Φ=→→5.210101lim )()(lim 23-3 已知二阶系统的单位阶跃响应为)1.536.1sin(5.1210)(2.1o tt et c +-=-试求系统的超调量σ%、峰值时间tp 和调节时间ts 。


3-1 设系统的微分方程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1) 因为)(2)(2.0s R s sC = 闭环传递函数ss R s C s 10)()()(==Φ 单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ 单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,用其测量容器内的水温,1min 才能显示出该温度的98%的数值。
若加热容器使水温按10ºC/min 的速度匀速上升,问温度计的稳态指示误差有多大?解法一 依题意,温度计闭环传递函数11)(+=ΦTs s 由一阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ=⎩⎨⎧==11v TK 用静态误差系数法,当t t r ⋅=10)( 时,C T Ke ss ︒===5.21010。
第三章3-4 已知二阶系统的单位阶跃响应为1.20()1012.5sin(1.653.1)th t e t-=-+试求系统的超调量σ%、峰值时间tp和调节时间ts。
解:依题意pt t=时()0ph t'=,并且pt是使()ph t'第一次为零的时刻(pt≠)1.20()1012.5sin(1.653.1)th t e t-=-+1.2001012.5(cos53.1sin1.6sin53.1cos1.6)te t t-=-+1.20 1.20 1.2()15sin(1.653.1)20cos(1.653.1)25sin1.6t t th t e t e t e t---'=+-+=可见,当()h t'第一次为0时,1.6 1.96p pt tπ=⇒=,所以1.21.960180()1012.5sin(1.6 1.9653.1)10.95ph t eπ-⨯=-⨯⨯+=()()10.9510%100%100%9.5%()10ph t hhσ-∞-=⨯=⨯=∞根据调节时间st的定义:0.95()() 1.05()sh h t h∞<<∞,即1.29.51012.50.5te-<-<,得ln0.04 3.2122.681.2 1.2st>-==所以:%9.5% 1.96 2.68p st s t sσ===3-5设图3-3是简化的飞行控制系统结构图,试选择参数K1和Kt,使系统ωn=6、ζ=1。
图3-3 飞行控制系统分析:求出系统传递函数,如果可化为典型二阶环节形式,则可与标准二阶环节相对照,从而确定相应参数。
解对结构图进行化简如图所示。
故系统的传递函数为1121112525(0.8)()25(1)(0.825)251(0.8)t t K K s s s K K s s K K s K s s +Φ==++++++和标准二阶系统对照后可以求出:21120.81.44,0.312525nn t K K K ωζω-====3-7已知系统特征方程如下,试求系统在s 右半平面的根数及虚根值。
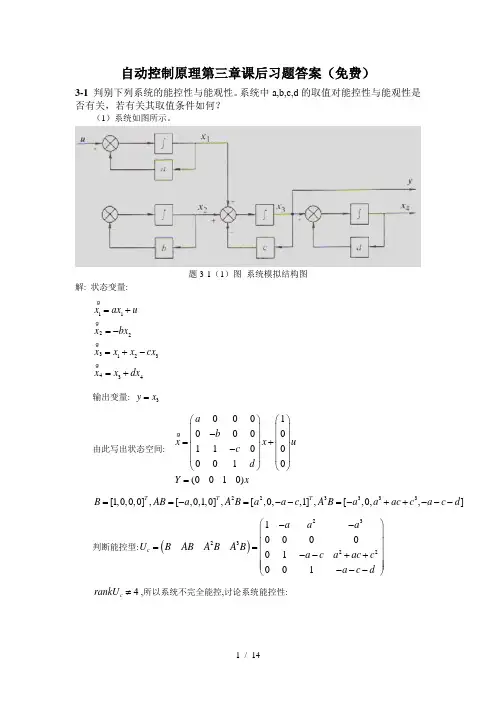
自动控制原理第三章课后习题答案(免费)3-1 判别下列系统的能控性与能观性。
系统中a,b,c,d 的取值对能控性与能观性是否有关,若有关其取值条件如何?(1)系统如图所示。
题3-1(1)图 系统模拟结构图解: 状态变量:11223123434x ax u x bx x x x cx x x dx =+=-=+-=+输出变量: 3y x =由此写出状态空间:0001000011000010(0010)a b x x u c d Y x⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪=+ ⎪ ⎪- ⎪ ⎪⎝⎭⎝⎭= 223333[1,0,0,0],[,0,1,0],[,0,,1],[,0,,]T T T B AB a A B a a c A B a a ac c a c d ==-=--=-++---判断能控型:()2323221000001001c a a a U BABA BA B a c a ac c a c d ⎛⎫-- ⎪⎪== ⎪--++ ⎪ ⎪---⎝⎭4c rankU ≠,所以系统不完全能控,讨论系统能控性:判断能观性:022322222001011000C CA c U CA a c b c c CA a ac c b bc c c ⎛⎫⎛⎫ ⎪ ⎪-⎪ ⎪== ⎪ ⎪---- ⎪ ⎪++++-⎝⎭⎝⎭04rankU ≠,所以系统不能观.(2)系统如图所示。
题3-1(2)图 系统模拟结构图解: 状态变量:()1211101[,]1c x a b x ux c d y xa b U B AB c d -⎛⎫⎛⎫⎛⎫=+ ⎪ ⎪ ⎪--⎝⎭⎝⎭⎝⎭=-+⎛⎫== ⎪--⎝⎭若0,a b c d b ----≠则2c rankU =,系统能控.010C U CA a b ⎛⎫⎛⎫== ⎪ ⎪-⎝⎭⎝⎭若0b ≠,则02rankU =,系统能观.(3)系统如下式:1122331122311021010000200000x x x a ux x b x x y c d x y x ∙∙∙⎛⎫-⎛⎫⎛⎫⎛⎫ ⎪ ⎪⎪ ⎪ ⎪=-+⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭ ⎪⎝⎭⎛⎫⎛⎫⎛⎫ ⎪= ⎪ ⎪⎪⎝⎭⎝⎭ ⎪⎝⎭解:系统如下:1231122311021010000200000x x x a u x b x y c d x y x -⎛⎫⎛⎫⎛⎫ ⎪⎪ ⎪=-+ ⎪⎪ ⎪ ⎪⎪ ⎪-⎝⎭⎝⎭⎝⎭⎛⎫⎛⎫⎛⎫ ⎪= ⎪ ⎪ ⎪⎝⎭⎝⎭ ⎪⎝⎭若0,0a b ≠≠,系统能控.若0,0c d ≠≠,系统能观.3-2 时不变系统:311113111111x x u y x ∙-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭⎛⎫= ⎪-⎝⎭试用两种方法判别其能控性与能观性。