10
许多图形应用涉及到几何变换,主要包括平移、旋转、缩放。以矩 阵表达式来计算这些变换时,平移是矩阵相加,旋转和缩放则是矩 阵相乘,综合起来可以表示为p' = p *m1+ m2(m1旋转缩放矩阵, m2为平移矩阵, p为原向量 ,p'为变换后的向量)。引入齐次坐标 的目的主要是合并矩阵运算中的乘法和加法,表示为p' = p*M的形 式。即它提供了用矩阵运算把二维、三维甚至高维空间中的一个点 集从一个坐标系变换到另一个坐标系的有效方法。
6
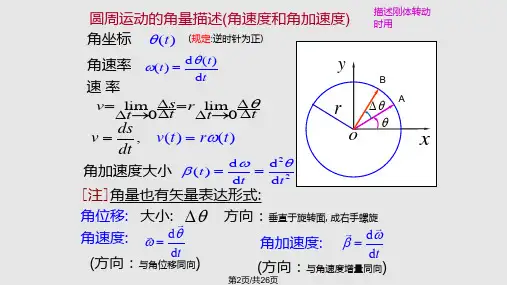
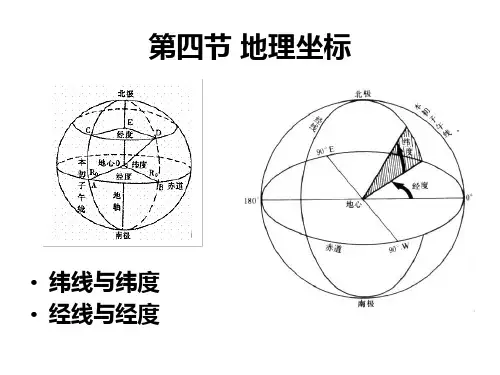
极坐标系
极坐标中会定一点为极点,再将一条通过极点的射线定 为极轴。若给定一角度θ,则可绘出通过极点,和极轴 夹角为θ的唯一射线(角度是以从极轴,依逆时针方向 旋转到射线),若再给定一实数r,可找出上述射线上, 距极点距离为有号整数r的一点[7]。
在极坐标系中,一坐标(r, θ)只会其对应唯一的一 点 , 但 每 一 点 均 可 对 应 许 多 个 坐 标 。 例 如 坐 标 ( r, θ)、 (r, θ+2π)及(−r, θ+π)都是对应同一 点的不同坐标。而极点的坐标为(0, θ),θ可为任 意值。
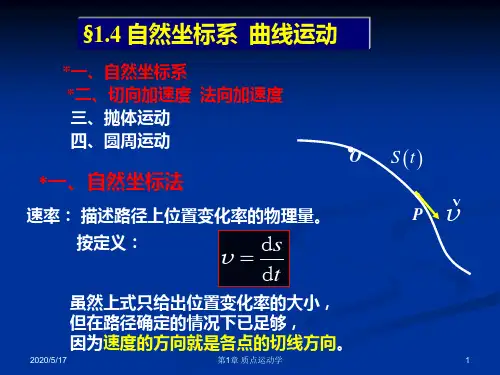
当汽车呼啸着从我们身边驶过,在我们的眼中,显然它 的运动就是在标系
所谓齐次坐标就是将一个原本是n维的向量用一个n+1维 向 量 来 表 示 。 例 如 , 二 维 点 (x,y) 的 齐 次 坐 标 表 示 为 (hx,hy,h)。由此可以看出,一个向量的齐次表示是不 唯一的,齐次坐标的h取不同的值都表示的是同一个点, 比 如 齐 次 坐 标 (8,4,2) 、 (4,2,1) 表 示 的 都 是 二 维 点 (4,2)。
4
笛卡儿坐标系
笛卡儿坐标系也称为直角坐标系,是最常用到的 一种坐标系。在平面上,选定二条互相垂直的线 为坐标轴,任一点距坐标轴的有号距离为另一轴 的坐标,这就是二维的笛卡儿坐标系,一般会选 一条指向右方水平线称为x轴,再选一条指向上方 的垂直线称为y轴