控制系统的时域数学模型
- 格式:pptx
- 大小:1.26 MB
- 文档页数:73
第二章控制系统的数学模型第章控制系统的数学模2-1 1 数学模型数学模型本书中主要介绍的几种系统模型图型:信号流程图数学模型描述系统行为特性的数学表达式模方块图信号程图数学模型:微分方程传递函数频率特性一、数学模型:描述系统行为特性的数学表达式。
是对实际物理系统的一种数学抽象。
模型各有特点,使用时可灵活掌握。
若分析研究系统的动态特性,取其数学模型比较方便;若分析研究系统的内部结构情况,取其物理模型比较直观;若两者皆有,则取其图模型比较合理。
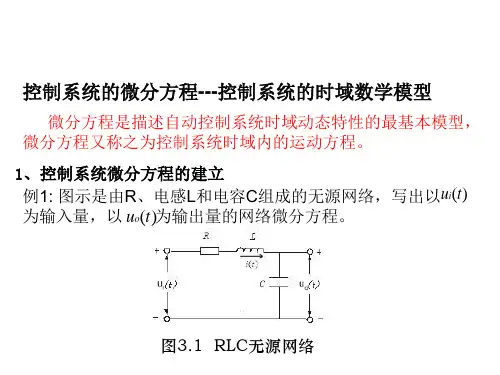
11——1.1. 控制系统的时域数学模型控制系统的时域数学模型微分方程r(t)——输入量c(t)c(t)a dc(t)a c(t)d a d a ++++L L dr(t)r(t)d r(t)db 其中,(i =0,1,2,…….n; j =0,1,2…….m) 均为实数,b a r(t)b b ++++=L L b (,,,;j ,,)实,j i2——定定常条输的变2.2.控制系统的复域数学模型控制系统的复域数学模型传递函数A. 定义:线性定常系统在初始条件为零时,输出量的拉氏变设:输入----r(t),输出----c(t),则传递函数:L[c(t)]G()式中C()L[(t)])s (C G(s)==式中:C(s)=L[c(t)]——输出量的拉氏变换式那么:C(s)=R(s)G(s)[R()G()][C()]()11[R(s)G(s)]L [C(s)]c(t)-1-1==推广到一般情况,系统时域数学模型——推广到般情况,系统时域数学模型微分方程:L L c(t)a a a a 011-n 1-n n n ++++r(t)b d b d d b -++++=L L b ()dt dtdt 011-m 1m m m L L R(s)b sR(s)b R(s)sb R(s)s b 01-1m m +++=a. 控制系统传递函数的一般表达形式:s −L L 传式011n n a s a s a a R(s)+++−b.b.表示成典型环节表达形式:111+++−s T s T s T s s R L )))()(21n υ∏∏i C )(s ωω;==11j l pnpnωωm 系统的稳态增益K =——系统的稳态增益;2m m m+=2n n nν++=c 零极点表达形式K C +++++L c. 表示成零、极点表达形式:)())(()(21m r z s z s z s s =−——νjp 系统的极点,个零极点。


自动控制原理控制系统的数学模型自动控制原理是现代控制工程学的基础,在控制系统的设计中起着至关重要的作用。
控制系统的数学模型是指通过数学方法对控制系统进行建模和描述,以便分析和设计控制系统的性能和稳定性。
控制系统的数学模型可以分为时域模型和频域模型两种形式。
一、时域模型时域模型是描述控制系统在时间域上动态行为的数学表达式。
时域模型是基于系统的差分方程或微分方程的。
1.线性时不变系统的时域模型对于线性时不变系统,可以通过系统的微分方程或差分方程来建立时域模型。
常见的时域模型包括:-一阶系统的时域模型:y(t)=K*(1-e^(-t/T))*u(t)-二阶系统的时域模型:y(t)=K*(1-e^(-t/T))*(1+t/Td)*u(t)2.非线性系统的时域模型对于非线性系统,时域模型可以通过系统的状态空间方程来建立。
常见的非线性系统时域模型包括:- Van der Pol方程: d^2x/dt^2 - μ(1 - x^2) * dx/dt + x = 0 - Lorenz方程:dx/dt = σ * (y - x), dy/dt = rx - y - xz, dz/dt = xy - βz二、频域模型频域模型是描述控制系统在频域上动态行为的数学表达式。
频域模型是基于系统的传递函数或频率响应函数的。
1.传递函数模型传递函数是系统的输入和输出之间的关系,是频域模型的核心。
传递函数可以通过系统的拉普拉斯变换或Z变换得到。
常见的传递函数模型包括:-一阶系统的传递函数模型:G(s)=K/(T*s+1)-二阶系统的传递函数模型:G(s)=K/(T^2*s^2+2ξ*T*s+1)2.频率响应模型频率响应函数是系统在不同频率下的输出和输入之间的关系。
频率响应函数可以通过系统的传递函数模型进行计算。
常见的频率响应模型包括:-幅频特性:描述系统在不同频率下的增益变化-相频特性:描述系统在不同频率下的相位变化控制系统的数学模型是对系统动态行为的数学描述,通过对控制系统进行数学建模和分析,可以有效地设计和优化控制系统,提高系统的性能和稳定性。